En el sector de la construcción, cada proyecto es, por definición, un prototipo único que se ejecuta bajo restricciones de tiempo, coste y alcance. Sin embargo, seguimos atrapados en la tiranía de la precisión determinista, intentando predecir resultados con una exactitud quirúrgica que la realidad, siempre cambiante, termina por desmentir. El método del Valor Ganado (EVM) es, sin duda, nuestra mejor herramienta de control, pero su dependencia de números «fríos» pasa por alto la vaguedad inherente a los datos de entrada.
En el sector de la construcción, cada proyecto es, por definición, un prototipo único que se ejecuta bajo restricciones de tiempo, coste y alcance. Sin embargo, seguimos atrapados en la tiranía de la precisión determinista, intentando predecir resultados con una exactitud quirúrgica que la realidad, siempre cambiante, termina por desmentir. El método del Valor Ganado (EVM) es, sin duda, nuestra mejor herramienta de control, pero su dependencia de números «fríos» pasa por alto la vaguedad inherente a los datos de entrada.
Gestionar un entorno complejo basándose en la ilusión de la precisión no solo constituye un error técnico, sino también un riesgo estratégico. La aplicación de la lógica difusa no debe entenderse como un mero ejercicio matemático, sino como un enfoque más honesto y robusto para gestionar el caos y la imprecisión que definen nuestra industria.
No es azar, es imprecisión: la distinción vital.
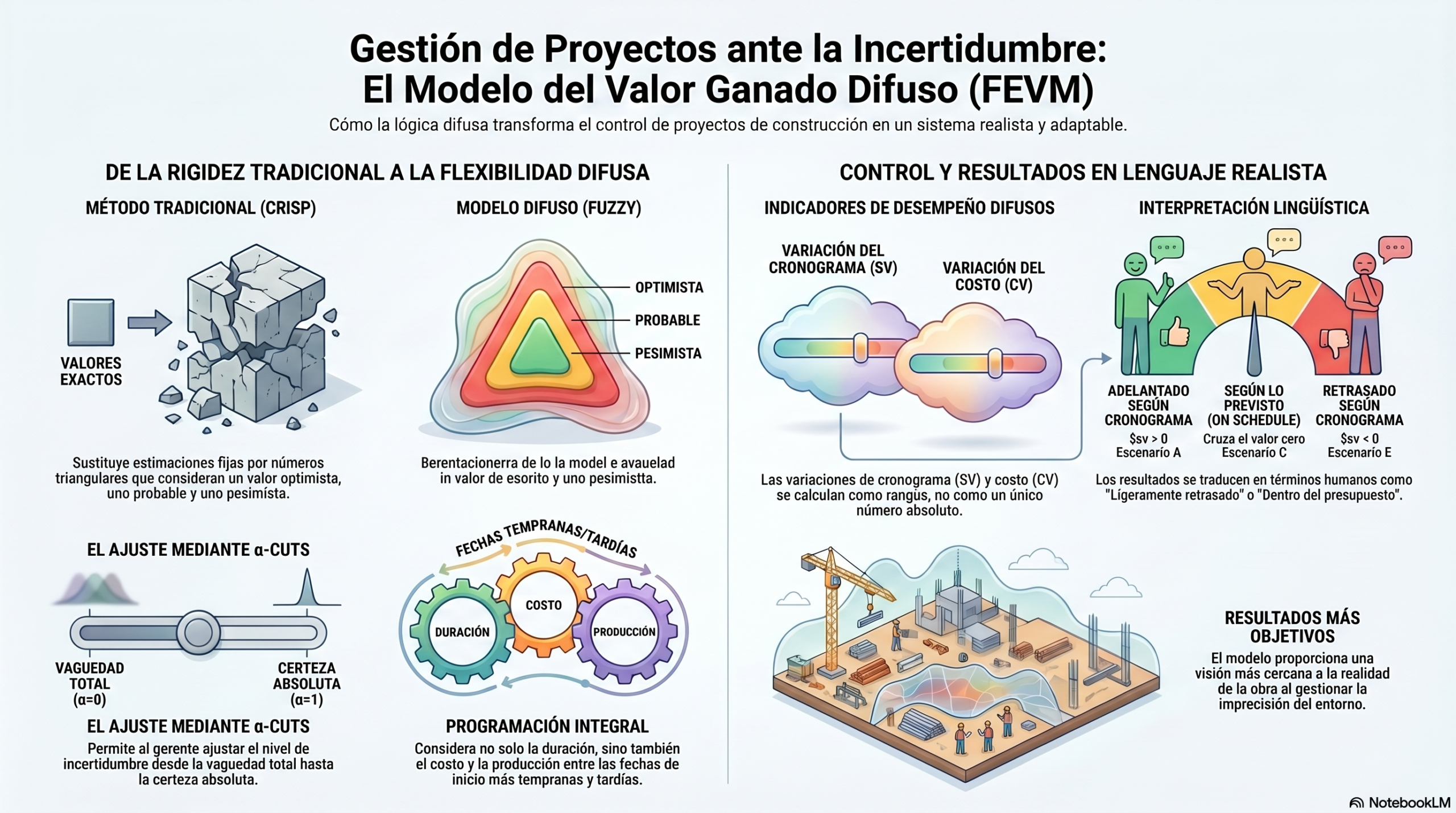
Debemos evitar el sesgo de precisión, que confunde dos conceptos fundamentales: la incertidumbre y la imprecisión. El modelo propuesto por Ponz-Tienda et al. (2012) establece una distinción clara que es vital para la toma de decisiones:
- Incertidumbre: de naturaleza aleatoria, estadística o probabilística.
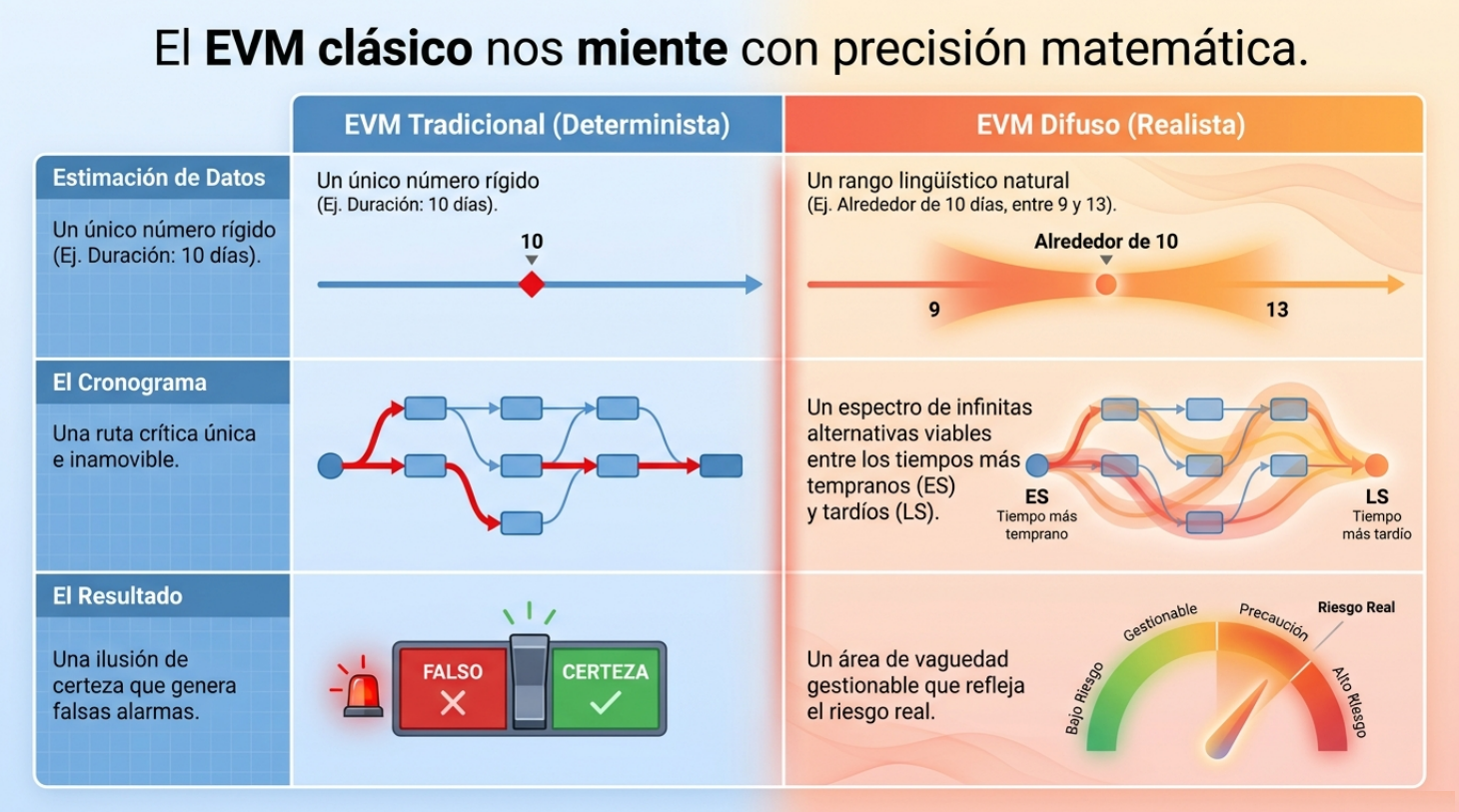
- Imprecisión: se refiere a una naturaleza vagamente definida o incompleta (por ejemplo, estimaciones de duración como «alrededor de 10 días»).
Mientras que la estadística tradicional intenta domar el azar, la teoría de los conjuntos difusos es la arquitectura diseñada para manejar lo impreciso. Esta metodología permite realizar operaciones aritméticas con valores que, aunque no se conocen con exactitud, pueden limitarse a fronteras de pertenencia.
Zadeh argumenta que «la probabilidad y la lógica difusa son complementarias, no competitivas. Ambas pueden y deben coexistir para proporcionar herramientas de análisis de la incertidumbre en modelos complejos del mundo real y para cubrir los vacíos que los métodos tradicionales no pueden llenar».
El «dial» de la confianza: ajustando el corte alfa (α-cut).
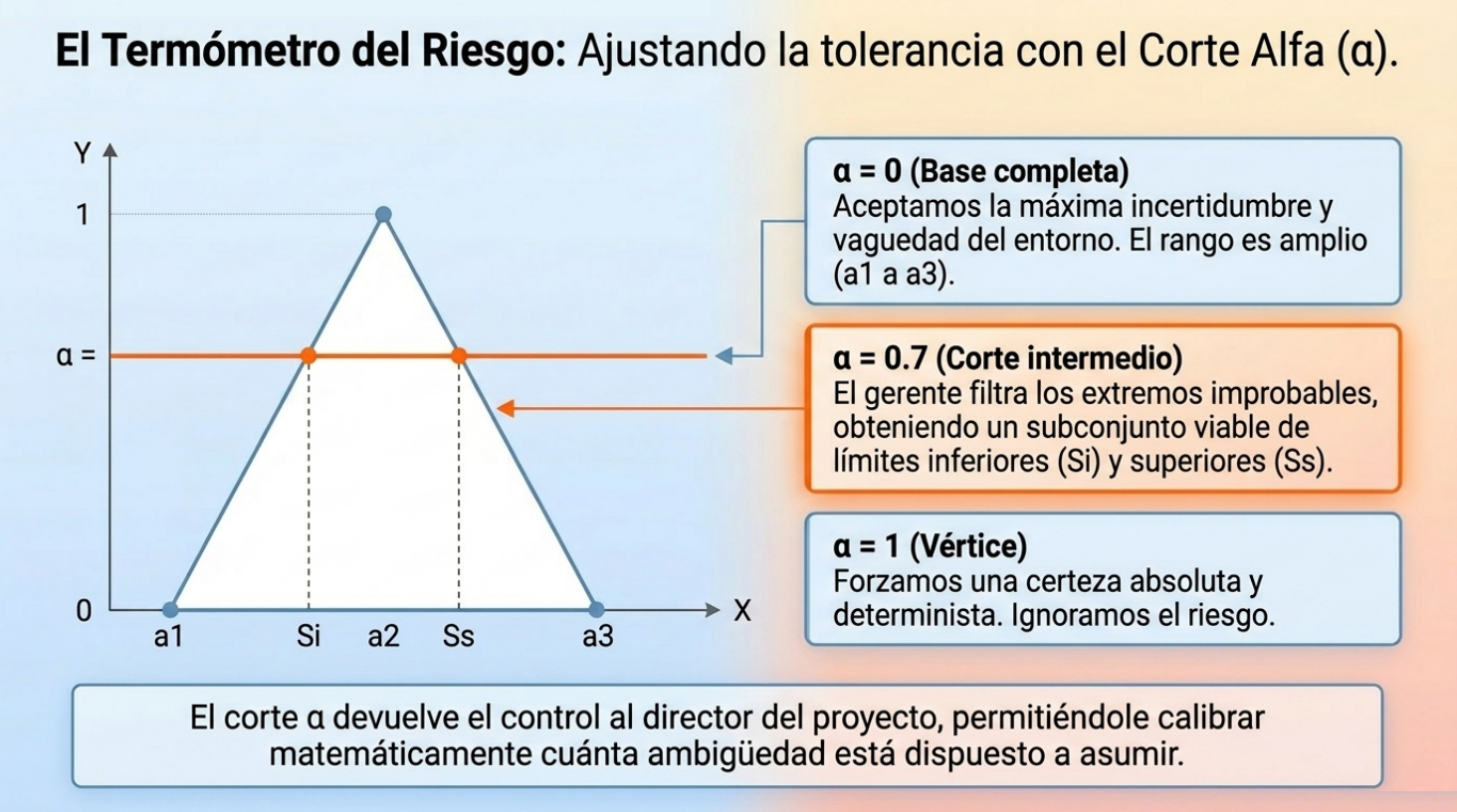
Una de las innovaciones más importantes del modelo difuso es el corte alfa (α-cut). Este parámetro actúa como un «dial» de control que permite al gestor ajustar la sensibilidad del modelo según su propia confianza o tolerancia al riesgo.
- Un α-cut igual a 0 representa el soporte del número difuso; es el escenario de máxima vaguedad e incertidumbre, en el que los límites son más amplios.
- Un α-cut de 1 representa el núcleo (kernel), elimina toda la ambigüedad y equivale al método determinista tradicional.
Esta capacidad de ajuste permite adaptar el modelo a las circunstancias específicas del proyecto. En las primeras fases o en entornos volátiles, un α-cut bajo permite visualizar todo el espectro de riesgos, mientras que en entornos estables, el gestor puede «cerrar» el dial hacia la precisión del núcleo.
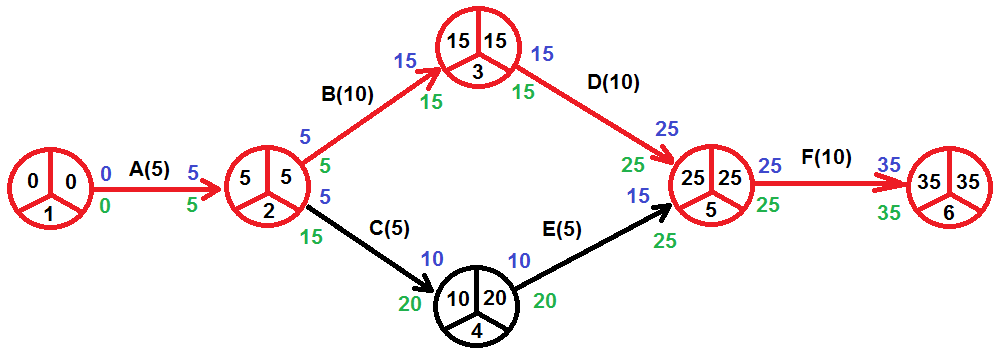
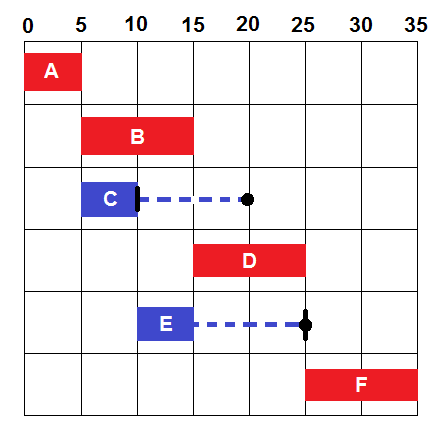
El mito del cronograma único: la realidad del diagrama de Gantt difuso.
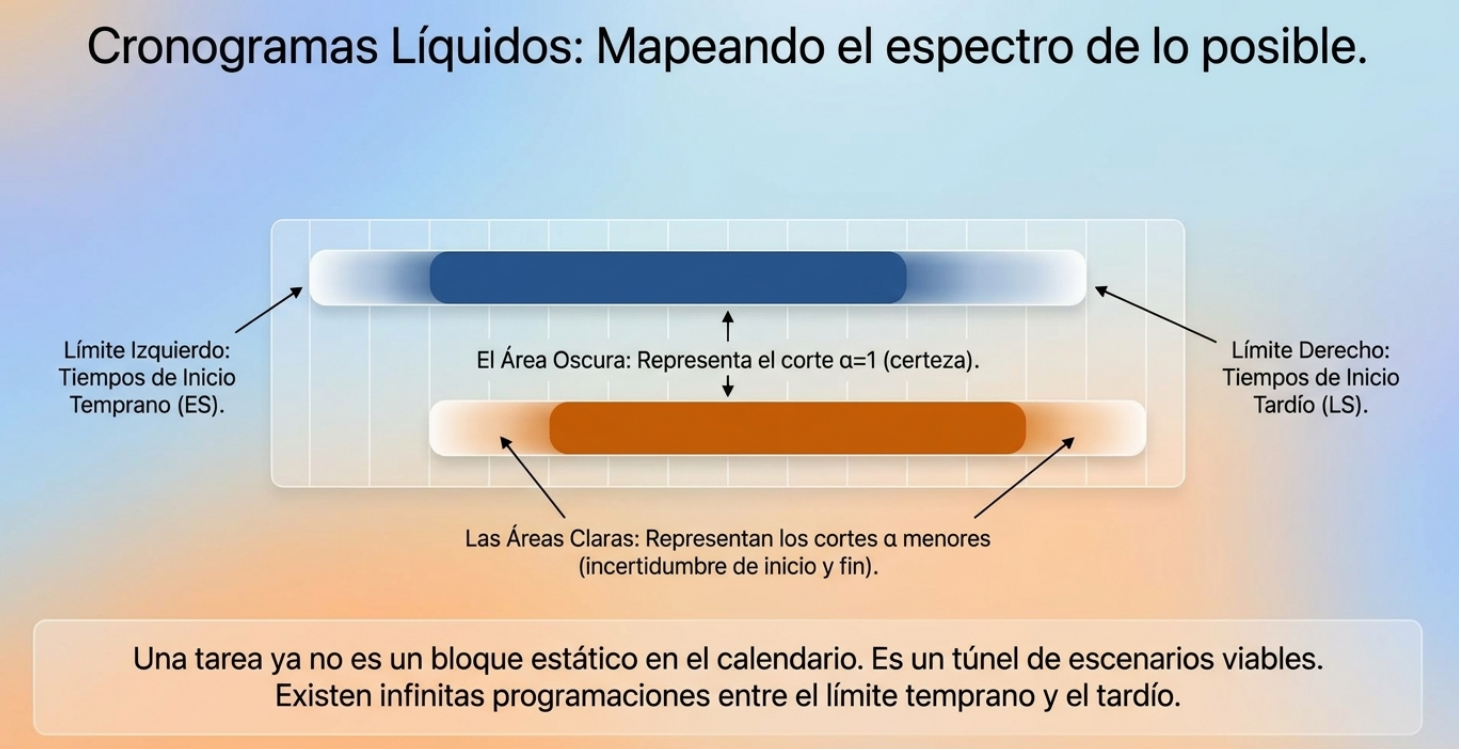
La metodología tradicional suele presentarnos un único cronograma factible como si fuera «la verdad absoluta». No obstante, las conclusiones basadas en un único escenario son inherentemente poco fiables. En la práctica, existe un número ilimitado de alternativas entre los tiempos de ejecución más tempranos y los más tardíos.
El modelo difuso rompe este mito al generar un diagrama de Gantt difuso. Este gráfico no traza una línea, sino que establece los límites superior e inferior de todos los cronogramas posibles. Al utilizar aritmética difusa en lugar de cálculos lineales, el resultado es significativamente más objetivo y proporciona una banda de cumplimiento que refleja la flexibilidad real —y los cuellos de botella potenciales— de la obra.
De métricas abstractas a la salud del proyecto: interpretación lingüística.
El EVM tradicional nos proporciona índices que a menudo no reflejan fielmente el desarrollo real del proyecto. El modelo de Ponz-Tienda innova al traducir variaciones numéricas complejas en categorías lingüísticas claras para los interesados. Esta interpretación se divide en tres dimensiones críticas:
- Variación de cronograma (SV): evalúa la conformidad del progreso real con el cronograma programado en términos de producción.
- Variación de coste (CV): mide la conformidad presupuestaria del trabajo efectivamente ejecutado.
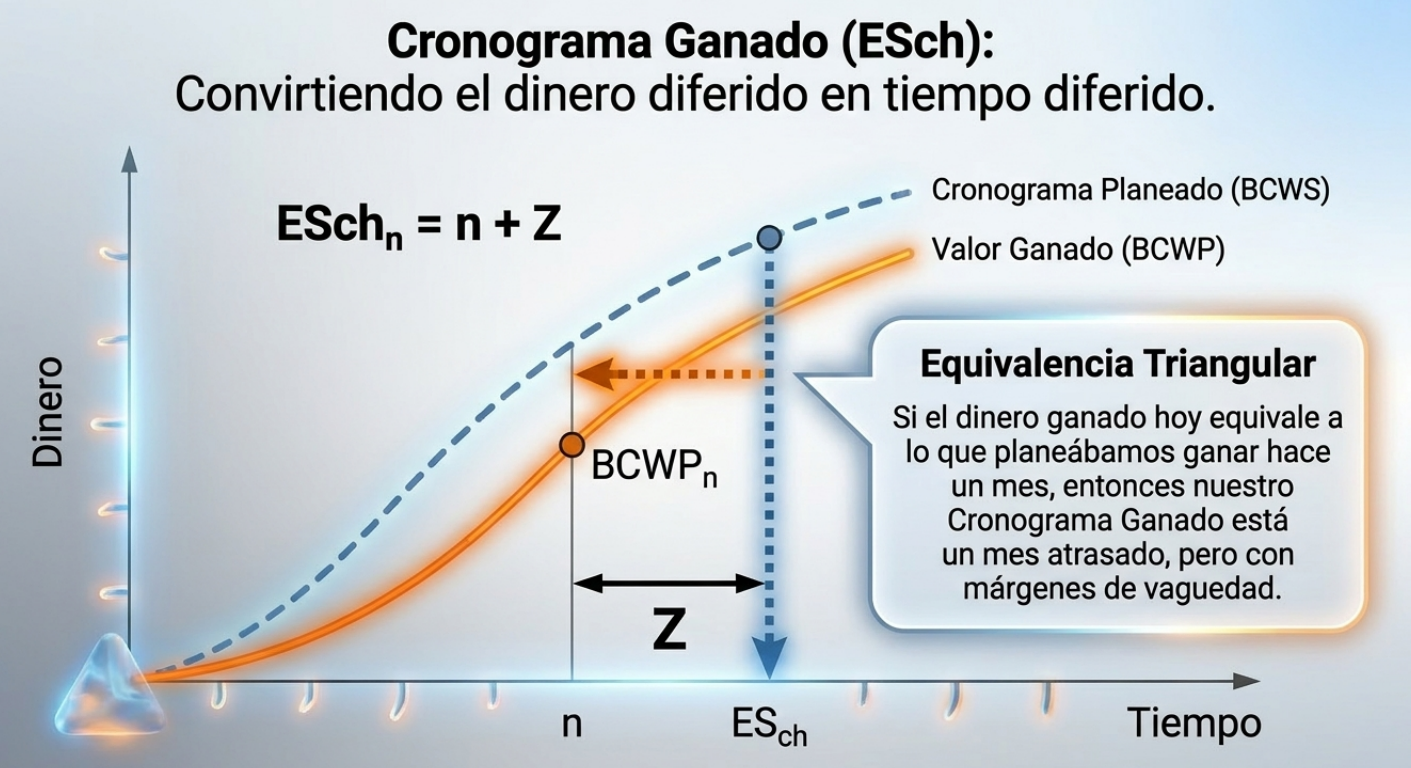
- Earned Schedule (ESch): traduce el rendimiento en unidades de tiempo reales, evitando los errores del SV tradicional cuando el proyecto excede la fecha de finalización prevista.
Según este modelo, cada dimensión se clasifica en cinco escenarios (del A al E) según el valor de α. Así, un proyecto puede clasificarse estratégicamente como «ligeramente retrasado en tiempo (ESch)», pero «bajo presupuesto (CV)», lo que permite una comunicación mucho más efectiva y humana que un simple decimal.
Innovación integral: el valor ganado difuso.
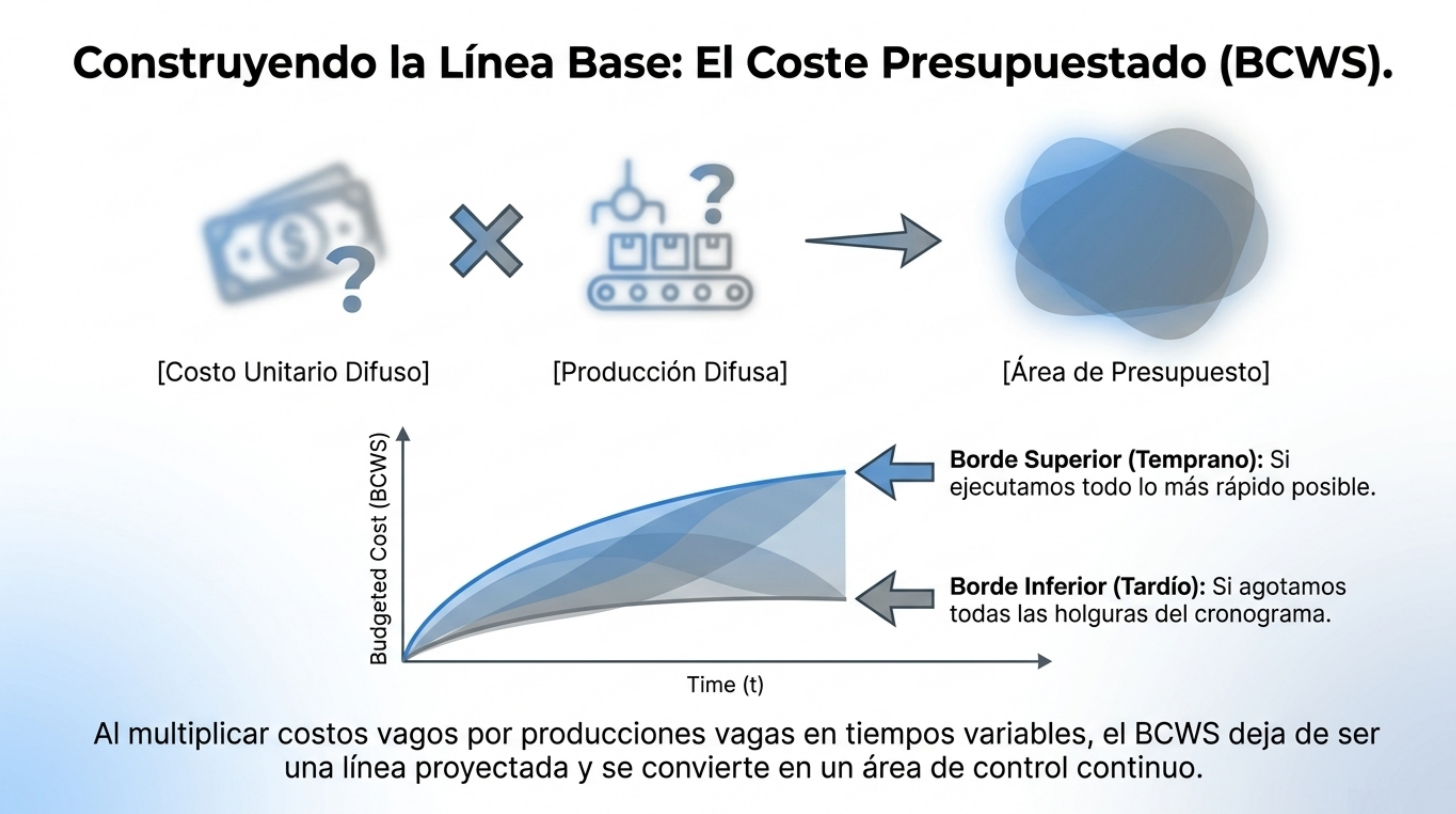
La propuesta de Ponz-Tienda et al. (2012) va más allá de la literatura existente al integrar no solo la duración de las tareas, sino también el coste y la producción en una formulación difusa no lineal. Esto se aplica directamente al BCWS (coste presupuestado del trabajo programado) y al BCWP (valor ganado) y permite capturar la complejidad de las relaciones entre estas variables de una forma que el EVM clásico no puede procesar.
A pesar de su profundidad académica, este modelo no es una utopía inalcanzable. Se ha demostrado su viabilidad técnica para su implementación en herramientas cotidianas, como Microsoft Excel. Esto es esencial, ya que permite superar la barrera académica y llevar la metodología a la práctica empresarial, sirviendo de puente para el desarrollo de software comercial especializado para directores de proyectos.
Conclusión: hacia una gestión de proyectos más humana y robusta.
El enfoque del Valor Ganado Difuso nos ofrece una «visión de conjunto» que acepta la imprecisión del mundo real en lugar de ignorarla. Al adoptar este modelo, pasamos de gestionar basándonos en puntos ficticios a tomar decisiones basadas en rangos realistas y sólidos.
Es importante entender que esta contribución no es una herramienta «llave en mano», sino un punto de partida para especialistas. El futuro de la gestión de riesgos en la construcción depende de nuestra capacidad para refinar estos modelos y establecer el valor de α-cut más cercano a la realidad de cada obra.
Como líderes, la pregunta final es inevitable: ¿Seguiremos gestionando nuestros proyectos bajo la falsa comodidad de un número exacto o daremos el paso hacia la honestidad estratégica de un rango difuso que realmente refleje la realidad?
En esta conversación puedes escuchar las ideas más interesantes sobre este tema.
Este vídeo resume bien los conceptos explicados.
Referencia:
PONZ-TIENDA, J.L.; PELLICER, E.; YEPES, V. (2012). Complete fuzzy scheduling and fuzzy earned value management in construction projects. Journal of Zhejiang University-SCIENCE A (Applied Physics & Engineering), 13(1):56-68. DOI:10.1631/jzus.A1100160

Esta obra está bajo una licencia de Creative Commons Reconocimiento-NoComercial-SinObraDerivada 4.0 Internacional.