Tricono con insertos. https://www.talleresegovia.com
La perforación rotativa con triconos se ha tratado en artículos anteriores. Se trata de uno de los procedimientos más extendidos y consiste en equipos grandes capaces de ejercer empujes elevados sobre la boca. En este artículo se explicará un procedimiento para calcular la velocidad de barrido.
El aire comprimido enfría y lubrica los cojinetes del tricono, limpia el fondo del barreno y eleva el detrito a la velocidad adecuada para el ascenso.
El aire circula desde el compresor hasta el mástil mediante un tubo y una manguera flexible protegida, pasando por la cabeza de rotación. A continuación, entra en la barra de perforación y llega a la boca, donde sale entre los conos, arrastrando los detritos y llevándolos a la superficie.
Si los fragmentos son grandes y el caudal de aire es insuficiente, vuelven al fondo y se remueven hasta alcanzar el tamaño adecuado. Esto genera un consumo innecesario de energía, una menor velocidad de penetración y un mayor desgaste de la boca. Por otro lado, una velocidad ascensional excesiva incrementa el desgaste del centralizador y de las barras de perforación.
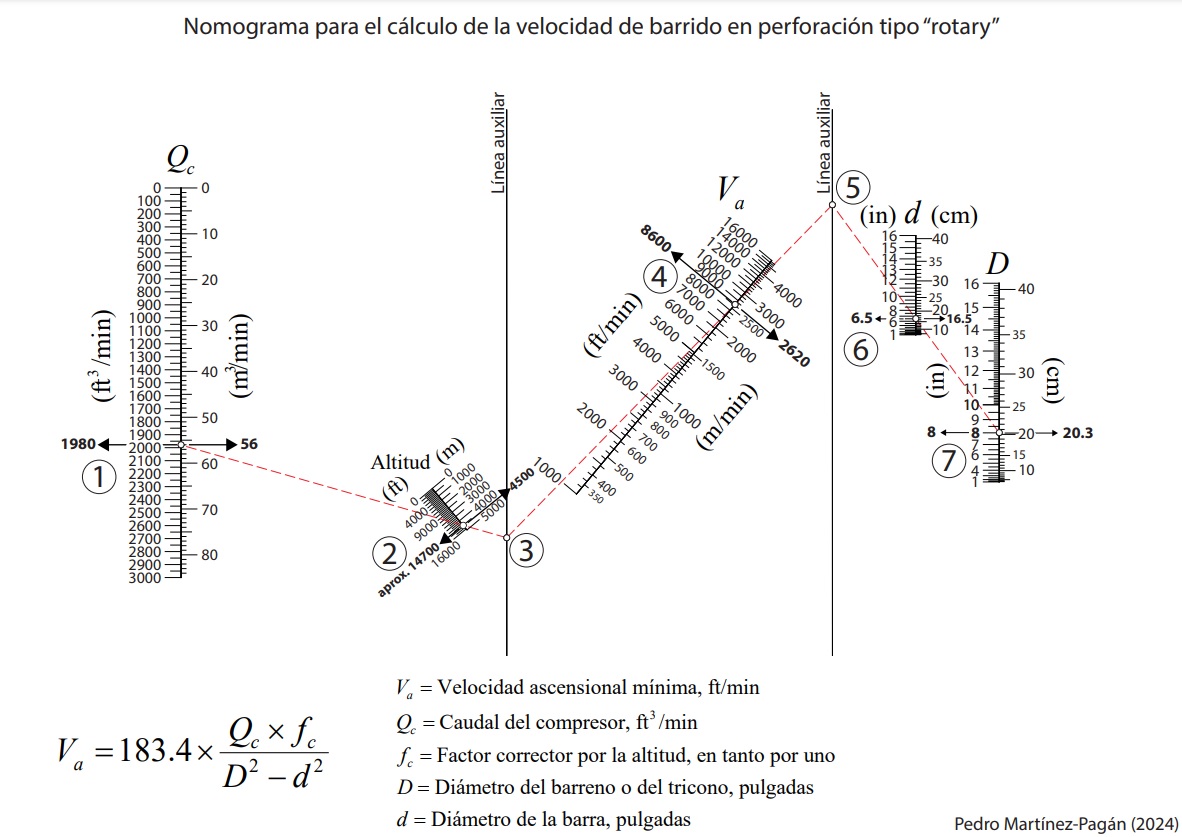
A continuación se ofrece un nomograma original elaborado por el profesor Pedro Martínez Pagán para estimar la velocidad de barrido de perforación de un equipo rotary (Instituto Tecnológico Geominero de España, 1994).
Esta expresión incorpora la corrección por altura geográfica que hay que hacerle al caudal que proporciona un compresor por la pérdida que sufre:
Referencias:
DIRECCIÓN GENERAL DE CARRETERAS (1998). Manual para el control y diseño de voladuras en obras de carreteras. Ministerio de Fomento, Madrid, 390 pp.
INSTITUTO TECNOLÓGICO GEOMINERO DE ESPAÑA (1994). Manual de perforación y voladura de rocas. Serie Tecnológica y Seguridad Minera, 2ª Edición, Madrid, 541 pp.
UNIÓN ESPAÑOLA DE EXPLOSIVOS (1990). Manual de perforación. Rio Blast, S.A., Madrid, 206 pp.
YEPES, V. (2014). Maquinaria para sondeos y perforaciones. Apuntes de la Universitat Politècnica de València, Ref. 209. Valencia, 89 pp.
La perforación rotativa con triconos es uno de los procedimientos más extendidos, y está constituido por grandes equipos capaces de ejercer elevados empujes sobre la boca. Esto se debe a que las unidades que trabajan con trépanos son más sencillas de diseño y de menor envergadura. Las perforadoras rotativas están formadas esencialmente por una fuente de energía, como una batería de barras o tubos individuales o conectados en serie, que transmite el peso de la rotación y el aire de barrido a una boca con dientes de acero o insertos de carburo de tungsteno que actúan sobre la roca.
En este tipo de perforación, la velocidad de penetración depende de muchos factores externos, como las características geológicas, las propiedades físicas de las rocas, la distribución de tensiones y la estructura interna. Por este motivo, determinar la velocidad de penetración durante el desarrollo de un proyecto es una tarea difícil para el ingeniero proyectista, pero necesaria, ya que la decisión que se tome va a incidir decisivamente en el resto de las operaciones.
Las fórmulas empíricas para estimar la velocidad de penetración son muy sencillas y se basan en ensayos de campo. En general, tienen en cuenta las siguientes variables: diámetro de la perforación, empuje sobre el tricono, velocidad de rotación y resistencia a compresión simple. La resistencia a compresión es la variable desconocida, cuyo valor se puede estimar fácilmente mediante un ensayo de laboratorio o de campo.
A continuación se ofrece un nomograma original elaborado por los profesores Pedro Martínez Pagán, Daniel Boulet y Trevor Blight para estimar el coeficiente de perforación de un equipo rotary basándose en la formulación empírica que dedujo Praillet en 1978. Esta fórmula es más fiable en todos los rangos de resistencias de las rocas y permite calcular el valor de la resistencia a compresión de la roca durante una operación en marcha.
Referencias:
DIRECCIÓN GENERAL DE CARRETERAS (1998). Manual para el control y diseño de voladuras en obras de carreteras. Ministerio de Fomento, Madrid, 390 pp.
INSTITUTO TECNOLÓGICO GEOMINERO DE ESPAÑA (1994). Manual de perforación y voladura de rocas. Serie Tecnológica y Seguridad Minera, 2ª Edición, Madrid, 541 pp.
PRAILLET, R. (1984), Consideraciones de un fabricante de máquinas de perforación. Canteras y Explotaciones
UNIÓN ESPAÑOLA DE EXPLOSIVOS (1990). Manual de perforación. Rio Blast, S.A., Madrid, 206 pp.
YEPES, V. (2014). Maquinaria para sondeos y perforaciones. Apuntes de la Universitat Politècnica de València, Ref. 209. Valencia, 89 pp.
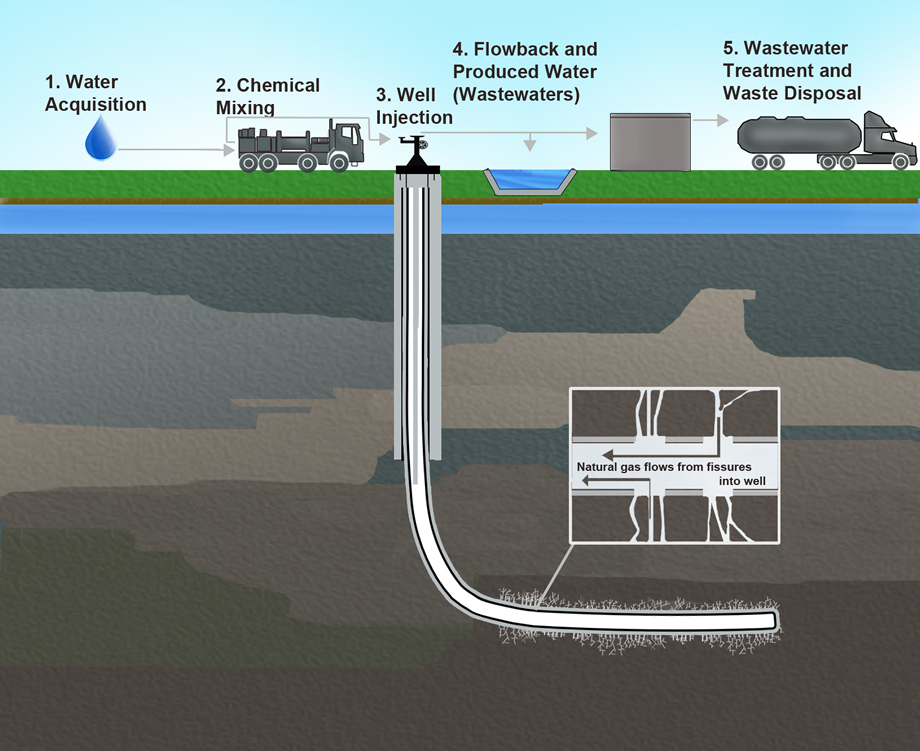
De US Environmental Protection Agency, Office of Research and Development, Washington, DC – «The Hydraulic Fracturing Water Cycle», Dominio público, https://commons.wikimedia.org/w/index.php?curid=25673027
La fracturación hidráulica, comúnmente conocida como fracking, es una técnica que se utiliza para extraer hidrocarburos, como el gas natural y el petróleo, de formaciones rocosas subterráneas de baja permeabilidad, especialmente lutitas o esquistos. Este método ha revolucionado la industria energética, ya que permite acceder a recursos que antes eran inaccesibles, contribuyendo significativamente a la diversificación de las fuentes de energía.
El fracking consiste en perforar un pozo vertical hasta alcanzar la formación rocosa objetivo. Una vez en la profundidad deseada, la perforación se desvía horizontalmente, extendiéndose varios kilómetros dentro de la capa de lutita. A través de este pozo se inyecta una mezcla de agua, arena y productos químicos a alta presión. Esta presión fractura la roca, creando fisuras por las que se liberan los hidrocarburos atrapados, que son posteriormente extraídos a la superficie.
Evolución histórica de la fracturación hidráulica
El desarrollo del fracking no es un fenómeno reciente, sino el resultado de una evolución que se inició hace dos siglos. En 1821, la perforación del primer pozo comercial de gas de lutita cerca de Fredonia, en Nueva York, marcó el inicio de la explotación de este tipo de gas. Aunque este recurso era útil para la iluminación doméstica, no adquirió relevancia económica hasta mucho después. No fue hasta después de la Segunda Guerra Mundial, en un contexto de crecimiento industrial y demanda energética acelerada, cuando el gas natural comenzó a jugar un papel clave.
En las décadas de 1980 y 1990, los productores se enfrentaron al declive de los yacimientos convencionales y comenzaron a buscar alternativas en formaciones de baja permeabilidad, como el gas de las capas de carbón (CBM) y el gas de lutita (shale gas). Sin embargo, estos recursos presentaban limitaciones tecnológicas significativas, especialmente en lo que respecta a la capacidad para extraer hidrocarburos atrapados en micro o nanoporos. No fue hasta 2005 cuando la combinación de fracturación hidráulica y perforación horizontal demostró plenamente su viabilidad, lo que supuso un cambio de paradigma en la industria energética global.
El fracking ha transformado el panorama energético de países como Estados Unidos, donde se ha convertido en uno de los principales productores de petróleo y gas a nivel mundial. Sin embargo, esta técnica ha generado debates y regulaciones en diversas regiones debido a sus implicaciones ambientales. En Europa, por ejemplo, se ha analizado la dependencia del gas obtenido por fracking en otros países y se han criticado estas prácticas.
La historia del fracking es también una historia de innovación. Desde la mejora de los motores de fondo y los sistemas de telemetría hasta el diseño de fracturas más eficientes, cada avance ha contribuido a aumentar la recuperación de hidrocarburos y a reducir los costes asociados. Sin embargo, el desarrollo de estas tecnologías ha planteado también nuevos desafíos ambientales y sociales que no existían en las explotaciones convencionales.
De Battenbrook – Trabajo propio, CC BY-SA 3.0, https://commons.wikimedia.org/w/index.php?curid=30796394
Fundamentos técnicos de la fracturación hidráulica
El fracking combina dos tecnologías clave: la perforación horizontal y la fracturación hidráulica. Ambas se han desarrollado para abordar el desafío que supone la extracción de hidrocarburos de yacimientos de baja permeabilidad, caracterizados por una porosidad extremadamente reducida y escasas conexiones entre los poros. Este tipo de formación geológica requiere la creación artificial de caminos por donde los hidrocarburos puedan fluir hacia los pozos de producción.
La perforación horizontal: Este enfoque, en contraste con la perforación vertical tradicional, permite acceder a una zona más extensa de la formación productora. Un pozo puede extenderse lateralmente varios kilómetros dentro del yacimiento, lo que aumenta considerablemente la cantidad de hidrocarburos que pueden recuperarse. Esto es especialmente relevante en yacimientos continuos como el gas de lutita, donde los hidrocarburos están distribuidos uniformemente en capas sedimentarias.
La fracturación hidráulica: Este proceso consiste en inyectar un fluido compuesto de agua, arena y aditivos químicos a alta presión. El agua actúa como medio de transporte, la arena como material de soporte de fracturas y los aditivos cumplen diversas funciones, como reducir la fricción, evitar la corrosión y mejorar la eficiencia del proceso. La fracturación crea redes de microfracturas en la roca madre, lo que aumenta la permeabilidad y permite que el gas o el petróleo fluyan hacia el pozo.
Avances tecnológicos adicionales: El uso de la telemetría avanzada (logging while drilling y measurement while drilling) proporciona datos en tiempo real sobre las condiciones del subsuelo. Esto permite ajustar la dirección del pozo y optimizar el diseño de las fracturas para maximizar la producción. Además, las fracturas multietapa, que dividen la sección horizontal del pozo en segmentos individuales, han demostrado ser una estrategia eficaz para estimular formaciones de gran tamaño.
Uno de los desafíos de los yacimientos de gas no convencional es el rápido declive de la producción. Este fenómeno obliga a perforar nuevos pozos de manera constante para mantener niveles de producción comercialmente viables. Por lo tanto, la explotación del gas de lutita es una actividad intensiva y duradera que requiere una planificación meticulosa y una inversión considerable.
Cómo funciona la fracturación hidráulica. https://www.todoporhacer.org/la-fractura-hidraulica/
Impactos ambientales del fracking
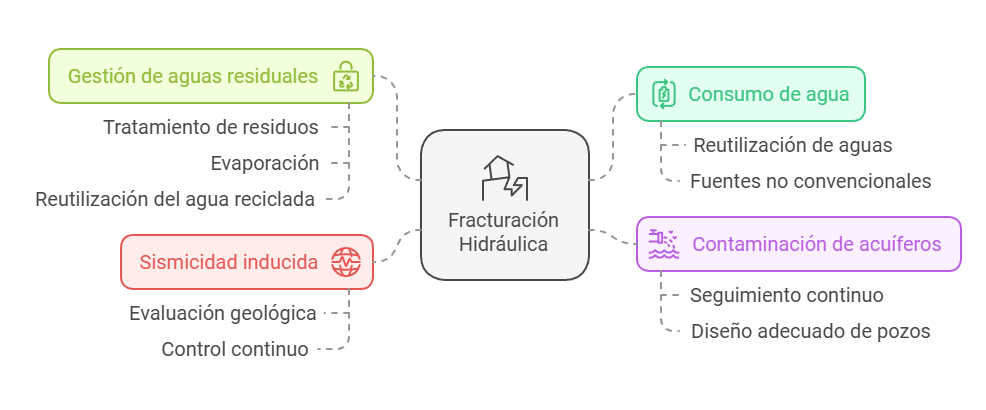
La fracturación hidráulica ha generado preocupaciones significativas en torno a su impacto ambiental, especialmente en lo que respecta al consumo de agua, la contaminación de acuíferos, la emisión de gases de efecto invernadero y la sismicidad inducida. Estas preocupaciones están respaldadas por pruebas documentadas que detallan tanto los riesgos como las medidas de mitigación disponibles.
Consumo de agua: Cada pozo de fracturación hidráulica requiere entre 8000 y 15 000 m³ de agua, dependiendo de factores como la profundidad del pozo y el número de etapas de fracturación. Esta cantidad de agua es considerable, particularmente en regiones con recursos hídricos limitados. Para mitigar este impacto, se ha propuesto reutilizar las aguas de retorno y utilizar fuentes no convencionales de agua, como las salobres. Es esencial investigar previamente la disponibilidad de agua superficial y subterránea para garantizar la sostenibilidad del proyecto.
Contaminación de acuíferos: Aunque las zonas de fractura están separadas de los acuíferos por capas de roca impermeable, las fugas a través de defectos en la cementación de los pozos suponen un riesgo. Los fluidos de fracturación, que contienen metano y aditivos químicos, pueden migrar hacia los acuíferos superficiales en caso de fallo estructural. Por ello, es esencial realizar un seguimiento continuo y diseñar adecuadamente los pozos para prevenir estos incidentes.
Sismicidad inducida: La fracturación hidráulica puede causar micro-sismos de baja intensidad, imperceptibles sin instrumentos especializados. En raras ocasiones, la inyección en áreas cercanas a fallas activas ha generado sismos de mayor magnitud, aunque el límite superior para estos eventos es de 3 en la escala de Richter. La evaluación geológica previa y el monitoreo continuo son fundamentales para minimizar este riesgo.
Gestión de aguas residuales: Las aguas de retorno contienen minerales disueltos, compuestos químicos y, ocasionalmente, materiales radiactivos naturales (NORM). Las estrategias de mitigación incluyen el tratamiento de residuos, la evaporación y la reutilización del agua reciclada. Estas medidas no solo reducen la demanda de agua dulce, sino que también minimizan el impacto ambiental.
Retos sociales y económicos
El desarrollo de la fracturación hidráulica enfrenta múltiples retos sociales y económicos. En términos sociales, la aceptación pública es fundamental. La percepción de riesgo asociada a la contaminación del agua, la sismicidad y la ocupación del terreno puede generar resistencia en las comunidades locales. Por otro lado, el fracking ofrece beneficios económicos significativos, como la reducción de la dependencia energética de las importaciones y la creación de empleo.
En España, las estimaciones de recursos prospectivos varían considerablemente. Según la Agencia Estadounidense de Información Energética (EIA), el país cuenta con 226 bcm de gas técnicamente recuperable, mientras que otros estudios elevan esta cifra a 1978 bcm. Estas reservas tienen el potencial de abastecer la demanda nacional durante décadas, aunque su desarrollo enfrenta desafíos como la falta de infraestructura y los altos costes de perforación.
Desde el punto de vista económico, el fracking es competitivo. El coste medio de extracción se estima en 5 céntimos de euro por kWh, lo que lo convierte en una opción viable frente a otras fuentes de energía. Sin embargo, para garantizar la sostenibilidad del sector, los beneficios deben equilibrarse con los riesgos ambientales y sociales.
Conclusiones
La fracturación hidráulica es una tecnología innovadora que ha transformado la industria energética. Aunque ofrece oportunidades significativas para la diversificación y la seguridad energética, su implementación debe abordarse con un enfoque integral que contemple tanto los beneficios económicos como sus posibles impactos ambientales y sociales. Es necesario realizar una evaluación cuidadosa y aplicar regulaciones estrictas para mitigar riesgos y garantizar una explotación sostenible de los recursos naturales. El desarrollo de recursos no convencionales en España requerirá una planificación meticulosa, un marco regulatorio sólido y un compromiso transparente con las comunidades locales.
Al adoptar medidas de mitigación efectivas y avanzar en tecnologías más sostenibles, el fracking puede desempeñar un papel crucial en la transición hacia un sistema energético más diversificado y seguro, minimizando al mismo tiempo su impacto ambiental y social.
Figura 1. Microtúnel.https://purewater-int.com/services/microtunneling/
La ingeniería civil ha desarrollado tecnologías avanzadas que permiten la instalación y el mantenimiento de infraestructuras subterráneas sin afectar significativamente a la superficie. Una de estas tecnologías, particularmente útil en áreas urbanas y entornos sensibles, es la de los microtúneles.
En este artículo, exploraremos los aspectos principales de los microtúneles, sus ventajas y limitaciones, los distintos tipos de escudos y los métodos de revestimiento, como el uso de dovelas y la hinca de tubería, que aseguran la estabilidad de los túneles.
1. ¿Qué son los microtúneles?
Los microtúneles son un tipo específico de tecnología sin zanja diseñada para instalar tuberías y conductos subterráneos a través de un proceso de perforación y revestimiento controlado, sin requerir excavaciones abiertas en la superficie. Estos túneles de pequeño diámetro suelen utilizarse para instalar colectores, redes de agua y sistemas de alcantarillado. A diferencia de otras técnicas de perforación, los microtúneles ofrecen mayor precisión y estabilidad estructural, ya que se utilizan tuneladoras y sistemas de guiado avanzados.
Ventajas de los microtúneles
Impacto mínimo en la superficie: Como no es necesario abrir zanjas, los microtúneles reducen las interrupciones en el tráfico y minimizan los daños en la infraestructura existente.
Menor impacto ambiental: Este método evita la remoción de grandes cantidades de tierra y reduce los desechos de la construcción, por lo que es una opción más ecológica.
Ideal para áreas de difícil acceso: Al requerir solo pozos de entrada y salida, los microtúneles son ideales para trabajos en áreas urbanas densamente pobladas o bajo infraestructuras ya existentes.
Limitaciones de los microtúneles
Costos iniciales elevados: La maquinaria y planificación requerida pueden aumentar los costos, especialmente en terrenos sencillos donde una excavación tradicional sería suficiente.
Necesidad de estudios geotécnicos detallados: Para asegurar el éxito del proyecto, es necesario un análisis exhaustivo del tipo de suelo, así como un diseño específico para el trazado y la maquinaria a emplear.
2. Maquinaria y equipos utilizados en la perforación de microtúneles
La construcción de microtúneles requiere diferentes tipos de escudos, que son dispositivos que protegen el frente de excavación y facilitan la extracción de material. El tipo de escudo elegido depende de las características del terreno y de las especificaciones del proyecto.
Tuneladoras de escudo abierto
Los escudos abiertos son los más básicos y se utilizan en terrenos cohesivos y por encima del nivel freático. Su diseño permite que el personal trabaje dentro del escudo y retire el material excavado mediante cintas transportadoras o vagonetas. Sin embargo, su principal limitación es que no pueden prevenir derrumbes, lo que los hace adecuados solo para suelos estables. Existen versiones que utilizan aire presurizado para estabilizar el entorno en algunas condiciones.
Tuneladoras de escudo cerrado
Las tuneladoras de escudo cerrado son las máquinas principales utilizadas en los microtúneles. Estos equipos están diseñados para evitar derrumbes y permiten un control preciso sobre la extracción del material excavado. Existen dos tipos principales de tuneladoras de escudo cerrado:
Tuneladora EPB (Earth Pressure Balance): Equilibra la presión en el frente usando el propio material excavado, lo cual es especialmente útil en terrenos arcillosos. Además, utiliza espumas y polímeros para estabilizar el suelo.
Tuneladora hidroescudo: Este tipo de tuneladora utiliza lodos para estabilizar el frente de excavación, lo que resulta especialmente útil en suelos arenosos o bajo el nivel freático.
Ambos tipos de escudos permiten extraer el material en seco o húmedo, asegurando una operación segura y eficiente en diversas condiciones geológicas.
Figura 2. Tuneladora EPB. https://www.gypsum.in/microtunneling/
3. Métodos de revestimiento en microtúneles
Un aspecto importante en la construcción de microtúneles es el revestimiento, que garantiza la estabilidad y durabilidad del túnel, especialmente en terrenos inestables. Existen dos métodos principales de revestimiento: el método de dovelas y el método de hinca de tubería.
Revestimiento con dovelas
Este método consiste en el uso de dovelas, secciones de anillo prefabricadas, que se ensamblan en el interior del túnel a medida que avanza la tuneladora. El procedimiento implica montar las dovelas dentro de la máquina y posteriormente inyectar mortero en el trasdós para garantizar la estabilidad del revestimiento y evitar filtraciones. Este método permite construir túneles con radios de curvatura pequeños, adaptándose a trazados complejos y de gran diámetro.
Revestimiento con hinca de tubería
El revestimiento con hinca de tubería es ideal para túneles de menor diámetro y consiste en empujar tramos de tubería prefabricada desde el pozo de ataque hasta el pozo de salida. Este proceso puede incorporar estaciones intermedias para longitudes extensas, y utiliza bentonita como lubricante para reducir la fricción durante la hinca. La principal ventaja de este método es que no requiere que el personal opere dentro de la tuneladora y facilita la alineación precisa gracias al sistema de guiado continuo.
Ambos métodos de revestimiento cumplen la función de asegurar la estabilidad y el sellado del túnel, aunque su selección dependerá de las características específicas del proyecto.
4. Planificación y ejecución de un proyecto de microtúnel
Para llevar a cabo un proyecto de microtúnel, es fundamental una planificación detallada que incluya:
Estudios geotécnicos: Analizar el tipo de suelo es esencial para definir el equipo y las técnicas de excavación adecuadas, especialmente en terrenos variables o inestables.
Selección de tuneladora y herramientas de corte: La tuneladora debe ser seleccionada en función de las condiciones del suelo, y equipada con herramientas de corte específicas.
Diseño del pozo de ataque: Los pozos de entrada y salida deben ser diseñados para facilitar el montaje y operación de la tuneladora.
Sistema de guiado: Un sistema de guiado, como un teodolito láser motorizado, asegura que la perforación siga el trazado previsto, evitando desviaciones que podrían afectar la estructura del túnel.
5. Caso de estudio: El colector de Valdemarín
Un ejemplo destacado de aplicación de los microtúneles es el proyecto del colector de Valdemarín, en el que se utilizó una tuneladora EPB con dovelas para construir un colector de aguas en un terreno arenoso y de alta abrasividad. El colector, con un diámetro nominal de 2760 mm, fue diseñado para superar el reto de excavar bajo un nivel freático considerable y con una geometría compleja, incluyendo curvas de pequeño radio. Gracias a la tecnología de microtúnel, fue posible instalar el colector, minimizando el impacto en el entorno urbano y controlando el proceso de excavación en un suelo particularmente desafiante.
Conclusión
Los microtúneles son una solución avanzada para la construcción subterránea, especialmente útil en entornos urbanos densos y ambientalmente sensibles. Con diversas opciones de escudos (abiertos y cerrados) y métodos de revestimiento, como las dovelas y la hinca de tuberías, esta tecnología proporciona flexibilidad y precisión en una amplia gama de condiciones geológicas. La implementación de microtúneles sigue siendo una herramienta clave para el desarrollo de infraestructuras subterráneas sostenibles, ya que minimiza el impacto en la superficie y optimiza el proceso constructivo.
Os dejo algunos vídeos para ilustrar esta técnica constructiva.
Referencias:
FRENCH SOCIETY FOR TRENCHLESS TECHNOLOGY (FSTT). Microtunneling and Horizontal Drilling: Recommendations. John Wiley & Sons, 2010.
YEPES, V. (2014). Maquinaria para sondeos y perforaciones. Apuntes de la Universitat Politècnica de València, Ref. 209. Valencia, 89 pp.
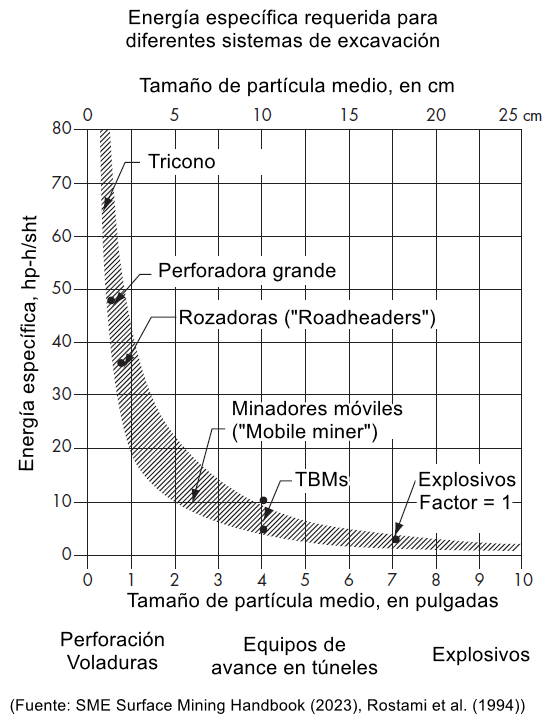
Figura 1. Energía específica requerida para diferentes sistemas de excavación.
La energía específica, también conocida como Specific Energy (SE) en inglés, se define como la cantidad de energía consumida para excavar un volumen unitario de roca. Esta medida se expresa en diversas unidades, tales como MJ/m, KW-h/m3, hp-h/yd3 o hp-h/t, que relacionan la energía consumida con el volumen excavado.
Es importante destacar que la energía específica tiende a aumentar cuando se busca producir partículas de un tamaño menor en una misma roca. Este incremento está directamente relacionado con el aumento de la resistencia a compresión de la roca en cuestión.
La energía específica requerida para la excavación de una determinada roca dependerá de dos factores clave: la separación de los cortadores (S) y su profundidad de ataque (P). El ratio entre estos dos parámetros, denominado S/P, se convierte en un elemento crucial al seleccionar equipos. Para rozadoras tipo “drag”, este ratio varía entre 2 y 4, mientras que para cortadores de discos oscila entre 10 y 20.
En términos prácticos, la energía específica desempeña un papel esencial al determinar los ratios de avance (m/h o m/día) de una máquina. Esta información se revela como un indicador clave para optimizar la eficiencia y el rendimiento de los equipos utilizados en la excavación de rocas.
La Figura 1 presenta el espectro de la energía específica necesaria para la fragmentación de una roca mediante diversos sistemas de excavación comúnmente utilizados.
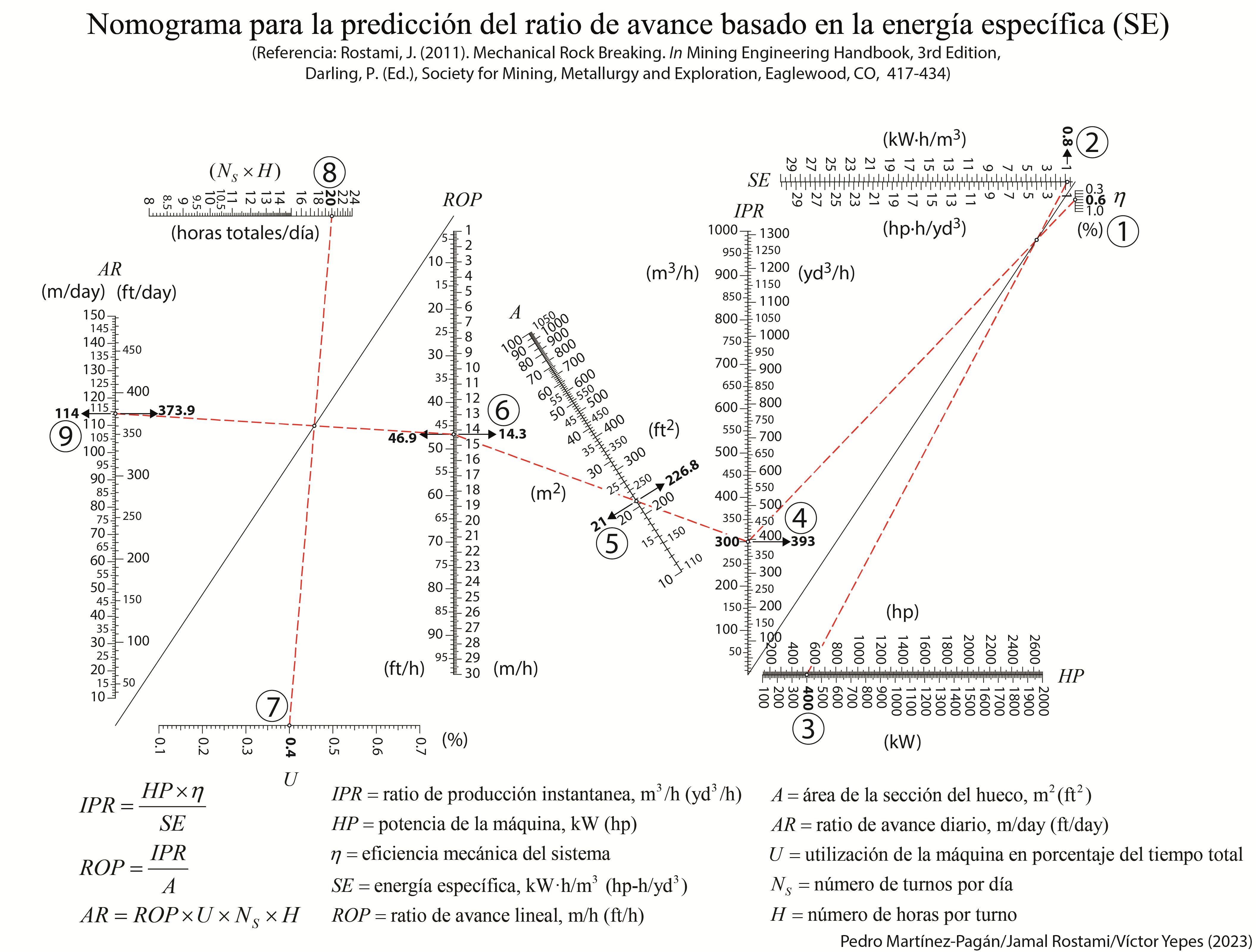
El ratio de producción instantáneo (IPR, en inglés) de un equipo se puede calcular de la siguiente forma:
El ratio lineal de avance (ROP, en inglés) de un equipo se calcula de la siguiente forma:
El ratio de avance diario (AR, en inglés) de un equipo es:
La tabla que se presenta a continuación resulta útil para anticipar el ratio de producción (IPR) y el ratio de avance (AR) de un equipo mecánico, todo ello fundamentado en la energía específica.
Referencias:
MARTÍNEZ-PAGÁN, P. (2023). Laboreo de minas. 3.º Curso – GIRME – Ingeniería de Minas. Universidad Politécnica de Cartagena.
ROSTAMI, J. (2011). Mechanical Rock Breaking. In SME Mining Engineering Handbook, 3rd Edition, Darling, P. (Ed.), Society for Mining, Metallurgy, and Exploration, 417-434.
YEPES, V. (2014). Maquinaria para sondeos y perforaciones. Apuntes de la Universitat Politècnica de València, Ref. 209.
Figura 1. Minador continuo excavando. https://www.exms.co.za/expert-camera-systems/continuous-miner-camera-system/
Los minadores continuos (continuous miners, en inglés) son equipos de excavación mecánica utilizados en minería subterránea. Crean huecos rectangulares con tambores de picas (6 m de ancho por 5 m de alto). Se emplean principalmente en minas de minerales blandos, como el carbón o la sal.
Existen equipos con la posibilidad de realizar un sostenimiento simultáneo, lo que les permite avanzar 12 m sin retirarse. Un equipo puede producir entre 600 y 700 t/h de mineral. Este mineral se descarga mediante un transportador blindado a “shuttle cars”.
A continuación, presento un ejercicio resuelto y un nomograma que pueden ser útiles para el cálculo del ratio de avance diario de un minador continuo. Se trata de una colaboración con el profesor de la Universidad Politécnica de Cartagena, Pedro Martínez Pagán.
Como podéis comprobar, existen vínculos comunes entre las especialidades de ingeniería civil y de minas en muchos aspectos relacionados con la maquinaria y los procedimientos de construcción. Espero que os sea útil.
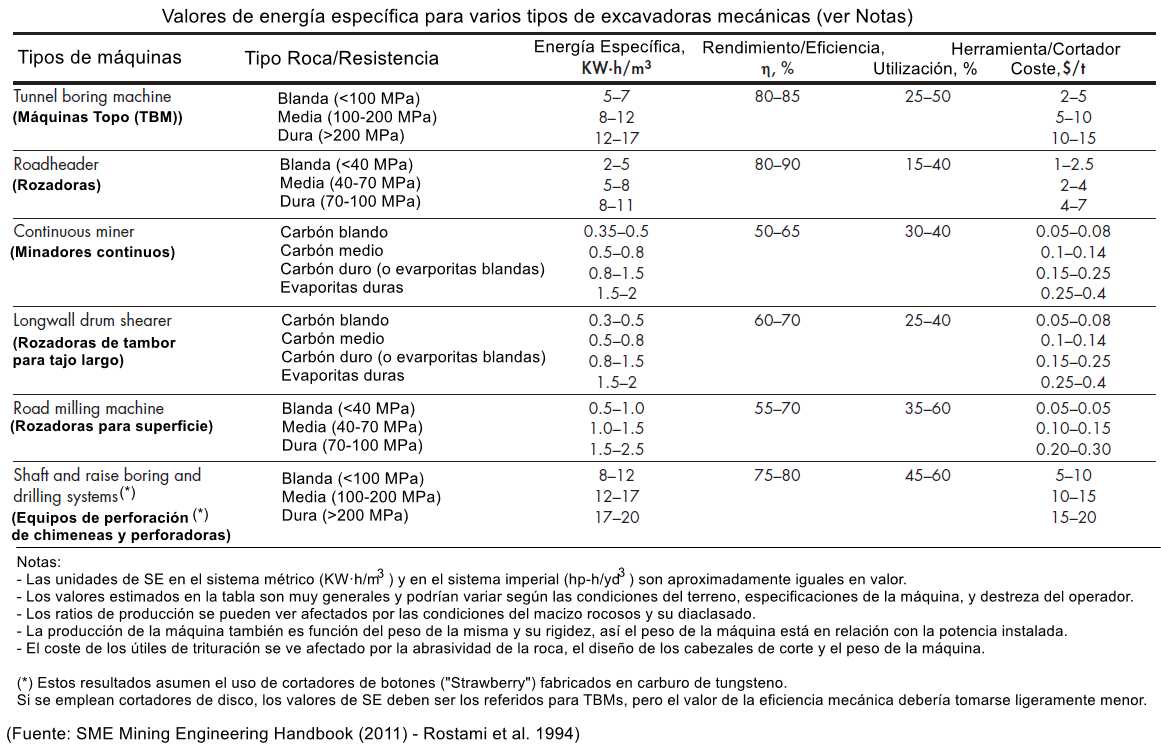
Para resolver este ejercicio, resulta de interés la tabla que presentamos en la Figura 2, donde se proporcionan valores de energía específica para varios tipos de excavadoras mecánicas.
Figura 2. Valores de energía específica para varios tipos de excavadoras mecánicas. Fuente: SME Mining Engineering Handbook (2011) – Rostami et al. (1994).
También podéis utilizar este nomograma, elaborado junto con los profesores Pedro Martínez Pagán y Jamal Rotami, que espero os resulte útil.
ROSTAMI, J. (2011). Mechanical Rock Breaking. In SME Mining Engineering Handbook, 3rd Edition, Darling, P. (Ed.), Society for Mining, Metallurgy, and Exploration, 417-434.
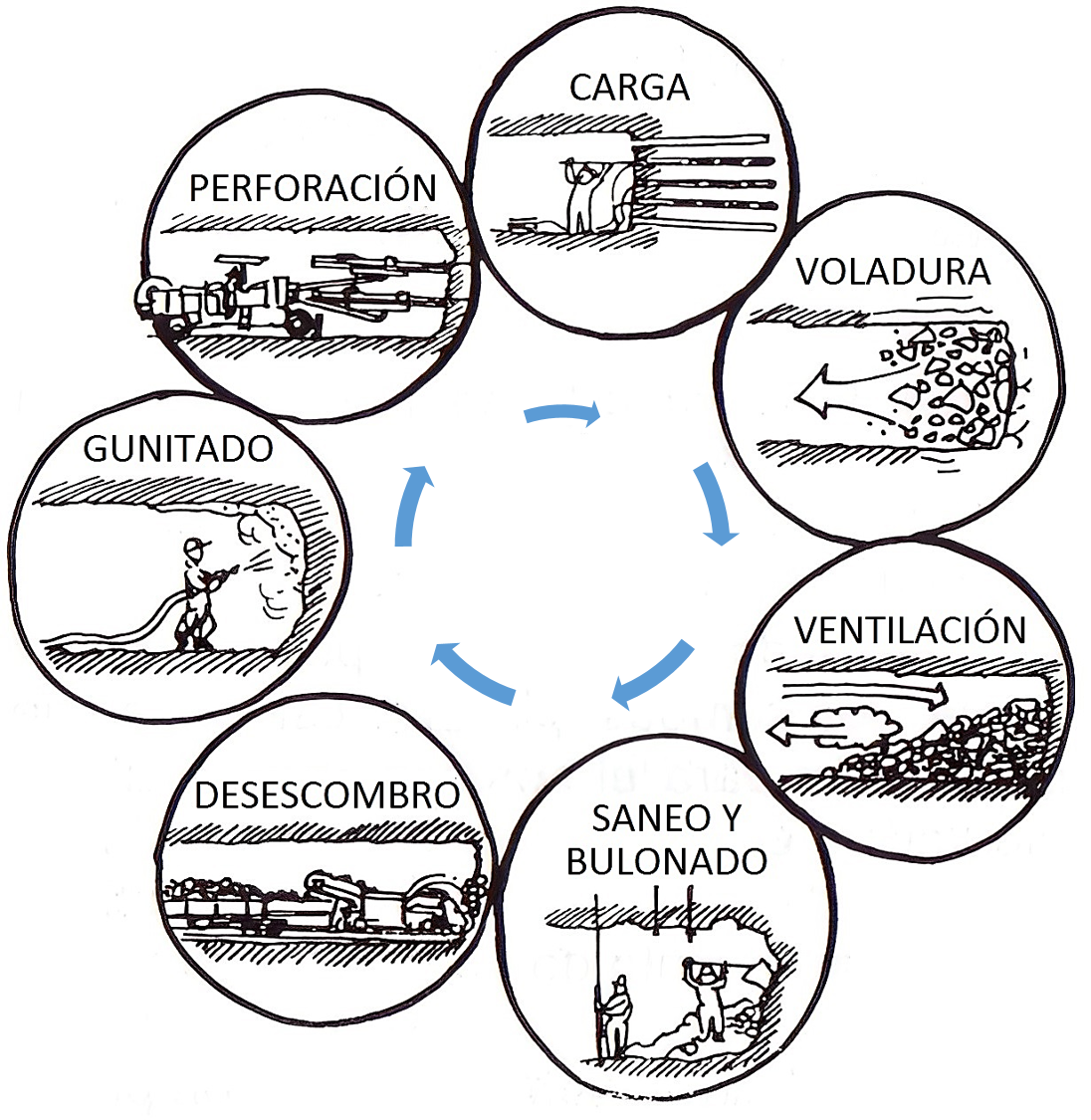
Figura 1. Operaciones básicas integrantes del ciclo de excavación de túneles con explosivos
A pesar del avance tecnológico, la técnica de perforación y voladura sigue siendo popular en la excavación de túneles por sus ventajas. A diferencia de la excavación mecánica, la técnica de explosivos es versátil, trabajando con varios tipos de roca y secciones de obra. Además, se adapta a otros trabajos, es fácil de transportar y la inversión inicial es reducida. Se trata de un método de frente abierto que consiste básicamente en realizar taladros que posteriormente se cargan con explosivos y se detonan. Los gases de la explosión penetran en las fracturas y desmenuzan la roca.
Esta técnica se utiliza en rocas de alta resistencia con una velocidad sísmica de entre 2000 y 2500 m/s, dependiendo de las condiciones del terreno o de la abrasividad de las rocas. Es aplicable a rocas con una resistencia a la compresión de 80 MPa o superior, incluso las más duras, por lo que resulta más eficiente que la excavación mecánica. En estos casos, la excavación mecánica puede no resultar rentable debido a la pérdida de rendimiento y al desgaste de los elementos. Además, la técnica de perforación y voladura es más flexible y puede adaptarse a cambios litológicos o trastornos tectónicos en el terreno.
La técnica de excavación con explosivos consiste en realizar taladros en el frente de excavación, cargarlos con explosivos y detonarlos. Para perforar se emplean equipos como “jumbos” o carros perforadores. Uno de los principales objetivos de una buena voladura es evitar el deterioro excesivo de la roca circundante a la excavación, ya que una voladura inadecuada puede provocar sobreexcavaciones y caídas de bloques que generen problemas de estabilidad adicionales. Por lo tanto, es necesario realizar voladuras controladas y técnicas, como el precorte o las voladuras suaves, para minimizar el daño estructural del terreno. En la Figura 1 se muestran las operaciones básicas que componen el ciclo de excavación de túneles con explosivos.
Los taladros se ajustan a una longitud de avance de entre 1 y 4 m, según la resistencia de la roca. Aunque hay diferentes disposiciones de taladros, todas ellas deben atenuar el confinamiento generado por la onda expansiva, ya que solo hay una salida.
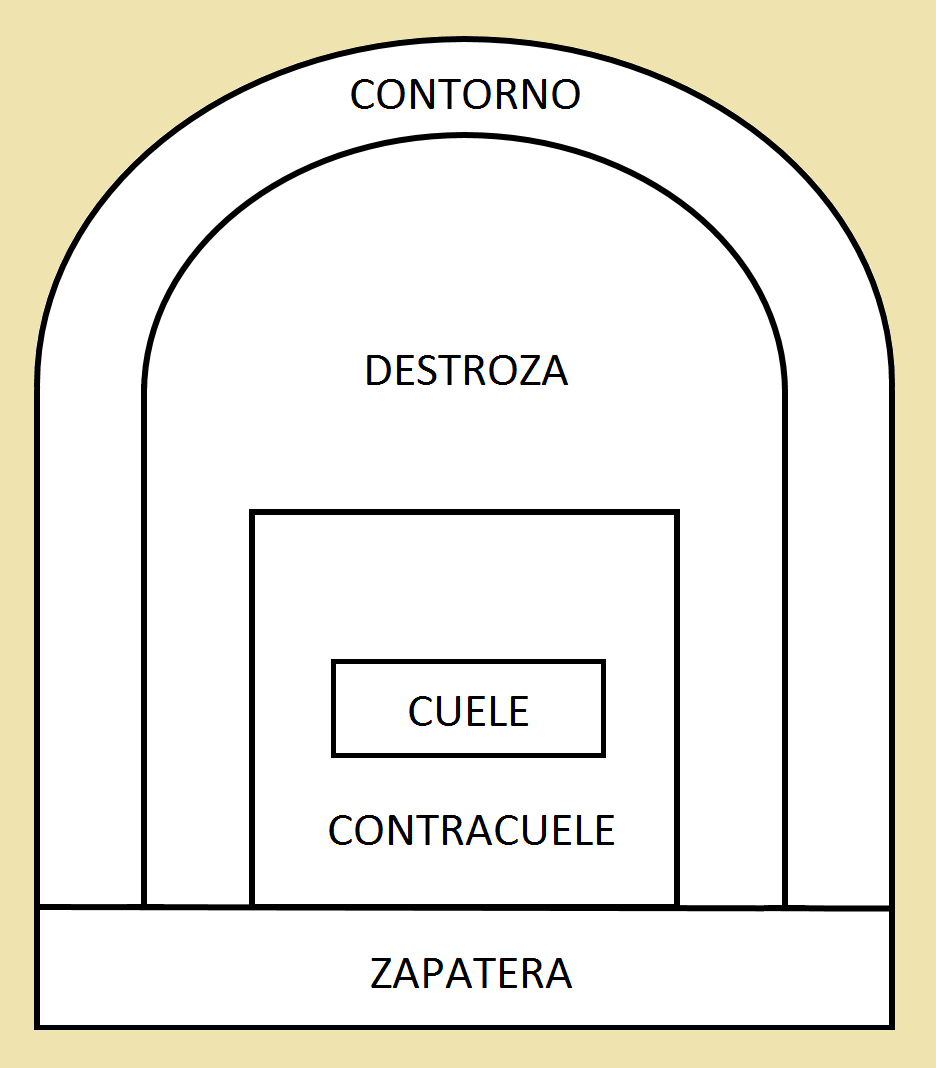
Figura 2. Zonas de una voladura en un túnel
La técnica de voladura en el frente de ataque consiste en una explosión controlada que se lleva a cabo mediante una secuencia. Se utilizan detonadores de retardo de milisegundos para activar las distintas áreas de la carga en momentos diferentes. Es necesario que, en un principio, se cree un hueco libre con los barrenos de cuele y contracuele, hacia el cual romperán las cargas restantes de la sección. A continuación, se vuela la destroza y se da forma a la sección del túnel con los barrenos del piso (zapateras) y los barrenos de recorte o de contorno.
La excavación de túneles puede llevarse a cabo en secciones completas o, si estas son demasiado grandes, por fases, empleando galerías de avance, destrozas laterales y/o banqueo del suelo. Los jumbos modernos presentan una ventaja significativa frente a los topos y los minadores. A diferencia de los topos, que solo pueden excavar secciones circulares, y de los minadores, que tienen una capacidad de cobertura limitada, los jumbos actuales se utilizan para trabajos de perforación y sostenimiento y cuentan con una gran movilidad que les permite desplazarse fácilmente de un frente a otro.
En términos de inversión, los equipos de perforación son más económicos que los minadores o topos para una misma sección de excavación. Por lo tanto, en obras lineales de reducida longitud, es el sistema más recomendable para su amortización y se puede destinar a la ejecución de otras obras distintas.
Sin embargo, el arranque con explosivos presenta algunos inconvenientes en comparación con la excavación mecánica. Por ejemplo, los perfiles de excavación pueden ser más irregulares y la alteración del macizo rocoso remanente puede ser intensa si las voladuras no se disparan empleando técnicas de contorno en el perímetro. Ambos aspectos pueden aumentar los costes de sostenimiento y, sobre todo, los del revestimiento mediante hormigonado.
Además, si se realizan perforaciones con explosivos en zonas urbanas, las vibraciones generadas por las voladuras pueden constituir un factor limitante. Por tanto, es necesario proteger la integridad de las edificaciones y de otras estructuras subterráneas, así como evitar las molestias a las personas.
Ciclo básico de perforación y voladura
En primer lugar, es importante tener en cuenta que la excavación de túneles en roca usando la perforación y los explosivos es una operación cíclica y no continua.
El ciclo básico de excavación mediante perforación y voladura consta de las siguientes operaciones. Si solo se excava la parte superior y un banco en lugar de todo el frente, se tendrá un ciclo doble más complejo:
Perforación de barrenos en el frente a un patrón y una profundidad adecuados.
Retirar el equipo perforador.
Carga del explosivo y retirada del personal.
Detonado de las cargas.
Evacuación de humos y ventilación.
Saneo de los hastiales y de la bóveda y del bulonado.
Carga y transporte del escombro.
Labores de sostenimiento y gunitado.
Replanteo de la nueva voladura.
El tiempo que se tarda en completar un ciclo de excavación para un túnel con sección completa o de calota, si el avance se realiza en varias fases, suele ser de uno a dos turnos, según la sección y el tipo de sostenimiento requerido. La distribución de tiempos suele seguir la tabla que se presenta a continuación:
Perforación de barrenos
10 – 30 %
Carga del explosivo
5 – 15 %
Voladura y ventilación
5 – 10 %
Saneo y desescombro
15 – 35 %
Sostenimiento
65 – 10 %
En la tabla se observa que el tiempo destinado al sostenimiento en la sección de avance puede superar el 50 % de la duración total del ciclo en los casos más desfavorables. Por otro lado, en la sección de destroza, estos tiempos suelen ser la mitad e incluso inferiores.
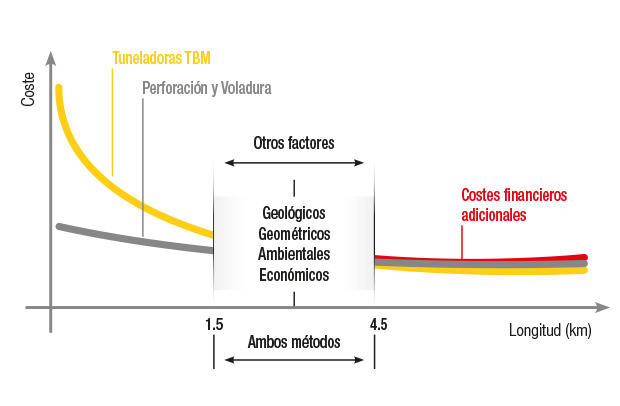
En general, se recomienda utilizar una tuneladora (TBM) para excavar túneles de más de 4,5 km de longitud y la técnica de perforación y voladura para túneles de menos de 1,5 km de longitud (ver Figura 3). Sin embargo, esta es una guía general y cada proyecto debe evaluarse en función de los factores específicos que puedan influir en la elección del método de excavación. Por ejemplo, puede haber casos en los que un túnel de 5 km se excave mediante perforación y voladura en lugar de con una tuneladora, o viceversa, en función de factores como la geología, la geometría, el impacto ambiental y los plazos de ejecución. Para los túneles cuya longitud está comprendida entre 1,5 y 4,5 km, los costes de ejecución pueden ser similares, pero deben considerarse otros factores para tomar una decisión informada sobre el método de excavación más adecuado.
Figura 3. Coste según longitud del túnel excavado para los métodos con TBM y perforación y voladura. https://bestsupportunderground.com/tbm-perforacion-voladura/
Referencias:
MARTÍ, J.V.; YEPES, V.; GONZÁLEZ, F.; ALCALÁ, J. (2012). Técnicas de voladuras y excavación en túneles. Apuntes de la Universitat Politècnica de València. Ref. 530, 165 pp.
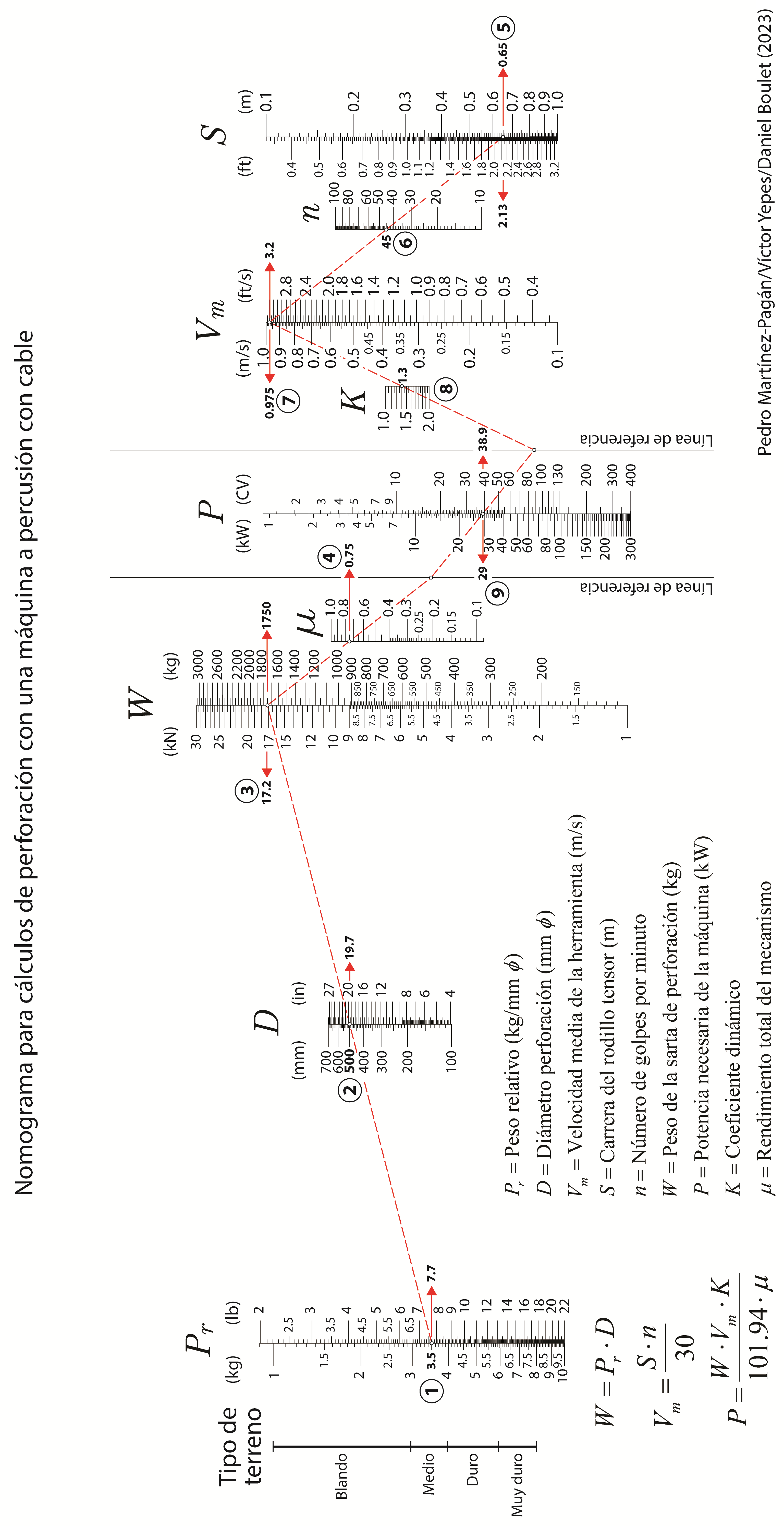
Perforación a percusión con cable. https://www.massenzaperforadoras.es/la-perforacion-de-percusion/
La perforación a percusión con cable es un método de perforación vertical que se basa en el golpeteo de un trépano pesado, elevado por un cable y que cae por gravedad, fragmentando el suelo. Este método se utiliza en terrenos de dureza media a baja o en terrenos duros frágiles, pero se desaconseja en terrenos detríticos no cohesionados, muy duros, abrasivos y plásticos. La frecuencia de golpeo se encuentra entre 40 y 50 impactos por minuto, y se obtienen rendimientos medios de 2 a 4 m/día en materiales duros y de 10 a 20 m/día en materiales blandos. La altura de caída del trépano depende de la dureza del terreno y de la profundidad del fondo de la perforación.
Aquí os traigo un nomograma original, elaborado en colaboración con los profesores Pedro Martínez-Pagán y Daniel Boulet, en el que se pueden calcular las características propias de este método de perforación, tales como el peso de la sarta de perforación, la velocidad media de la herramienta o la potencia necesaria de la máquina. También os paso un problema resuelto que espero que sea de vuestro interés.
Figura 1. https://www.monografias.com/trabajos68/tubos-exploracion-taladros-explotacion-subterranea/tubos-exploracion-taladros-explotacion-subterranea2
La perforación rotopercutiva con martillos hidráulicos es el método predominante en las voladuras a cielo abierto. Dentro de esta técnica se identifican tres grupos principales. De los dos primeros ya hemos hablado en sendos artículos de este blog.
El primer grupo son los martillos en cabeza, donde la rotación y la percusión ocurren fuera del barreno y se transmiten mediante la espiga y la sarta hasta la boca de perforación. Los martillos pueden ser neumáticos o hidráulicos, siendo estos últimos los más comunes. El rango de perforación es hasta 89 mm de diámetro y profundidades máximas de 15-20 m debido a las pérdidas de energía que se producen en la transmisión de la percusión a través del varillaje, siendo la desviación que es mayor en comparación con otros grupos. Las ventajas incluyen un menor coste de equipo y de energía, accesorios de perforación más económicos que los de los martillos de fondo, mayor velocidad de perforación y mayor facilidad de automatización de los equipos. Sin embargo, sus desventajas son una mayor desviación y un mantenimiento más complejo.
El segundo grupo es el martillo en fondo, donde la percusión se realiza directamente sobre la boca de perforación y la rotación se realiza en el exterior del barreno. El pistón se acciona mediante aire comprimido o agua, mientras que la rotación puede ser neumática o hidráulica. El rango de perforación va de 89 mm a 250 mm de diámetro y una profundidad máxima de 60 m. Las ventajas incluyen una velocidad de perforación constante a lo largo de la profundidad, menor desgaste en la boca y mayor vida útil del varillaje. Las desventajas son una menor velocidad de perforación y mayores costos de los fungibles, como los tubos y las bocas. Además, se puede perder el martillo si se atranca en el fondo del barreno.
El tercer grupo es el Sistema COPROD, que combina la tecnología de martillo en cabeza y en fondo para la perforación. Se utilizan perforadoras similares a las de martillo en cabeza, pero se llevan a cabo la percusión y la rotación del martillo por separado, lo que une la velocidad de perforación del martillo en cabeza con la menor desviación del martillo en el fondo. El varillaje transmite la percusión y el aire de barrido necesarios hasta la boca del pozo. La rotación también se realiza desde la superficie mediante una tubería exterior unida al varillaje mediante guías, lo que proporciona mayor rigidez y peso y reduce el espacio entre las paredes del barreno y el varillaje. Entre las ventajas se incluyen el aumento del diámetro de perforación, el menor riesgo de atranques, el menor consumo de energía, la mayor vida útil de los accesorios de perforación y la menor desviación en comparación con otros métodos. Sin embargo, es importante tener en cuenta que el COPROD puede resultar más costoso que otros métodos.
Os dejo algunos vídeos explicativos sobre la perforación COPROD que espero que os sean de interés.
Referencias:
DIRECCIÓN GENERAL DE CARRETERAS (1998). Manual para el control y diseño de voladuras en obras de carreteras. Ministerio de Fomento, Madrid, 390 pp.
INSTITUTO TECNOLÓGICO GEOMINERO DE ESPAÑA (1994). Manual de perforación y voladura de rocas. Serie Tecnológica y Seguridad Minera, 2ª Edición, Madrid, 541 pp.
MARTÍ, J.V.; YEPES, V.; GONZÁLEZ, F.; ALCALÁ, J. (2012). Técnicas de voladuras y excavación en túneles. Editorial de la Universitat Politècnica de València. Ref. 530, 165 pp.
UNIÓN ESPAÑOLA DE EXPLOSIVOS (1990). Manual de perforación. Rio Blast, S.A., Madrid, 206 pp.
YEPES, V. (2022). Maquinaria para sondeos, movimientos de tierras y construcción de firmes. Apuntes de la Universitat Politècnica de València, Ref. 22.
Perforadora con martillo en cabeza. https://psvperforacion.com/productos-bburg/
La perforación con martillo en cabeza es un sistema clásico que ha sido accionado mediante neumático. De este tipo de perforadora ya hemos hablado en un artículo anterior. Sin embargo, hoy en día está siendo desplazado por los martillos en fondo y equipos rotativos. De hecho, desde la aparición de los martillos hidráulicos en la década de los 70, este sistema ha vuelto a cobrar utilidad y campo de aplicación.
¿Cuál es la razón de este cambio de tendencia? La justificación es muy sencilla. Basta con emplear las ecuaciones básicas de la energía y la potencia desarrollada por el pistón de este tipo de perforadoras. En efecto, la energía cinética que alcanza el pistón es proporcional a la presión de aire, a la superficie del pistón y a la longitud de carrera. Para calcular la potencia, bastará contar el número de impactos (energía cedida) en la unidad de tiempo (impactos por minuto).
Por tanto, ante dos perforadoras de la misma potencia, una produciendo pocos impactos por minuto (n), pero de gran energía, y otra con un elevado número de impactos por minuto (N), pero de pequeña energía, tendremos que la primera perforadora romperá más roca a cada golpe, pero la barrena sufrirá mucho, llegando, en algunos casos, a clavarse en la roca. La segunda cortará menos roca por impacto, de modo que no fatigará el varillaje ni clavará la barrena, siempre que su impacto supere la energía necesaria para romper esa menor cantidad de roca.
Por tanto, las perforadoras con un gran pistón, gran carrera y presiones bajas son una tendencia antigua que se sustituye por perforadoras hidráulicas, con altas presiones, pistones y carrera pequeños y gran número de impactos por minuto.
Os dejo a continuación la demostración de esta formulación que, espero, os sea de utilidad.
DIRECCIÓN GENERAL DE CARRETERAS (1998). Manual para el control y diseño de voladuras en obras de carreteras. Ministerio de Fomento, Madrid, 390 pp.
INSTITUTO TECNOLÓGICO GEOMINERO DE ESPAÑA (1994). Manual de perforación y voladura de rocas. Serie Tecnológica y Seguridad Minera, 2ª Edición, Madrid, 541 pp.
MARTÍ, J.V.; YEPES, V.; GONZÁLEZ, F.; ALCALÁ, J. (2012). Técnicas de voladuras y excavación en túneles. Editorial de la Universitat Politècnica de València. Ref. 530, 165 pp.
UNIÓN ESPAÑOLA DE EXPLOSIVOS (1990). Manual de perforación. Rio Blast, S.A., Madrid, 206 pp.
YEPES, V. (2022). Maquinaria para sondeos, movimientos de tierras y construcción de firmes. Apuntes de la Universitat Politècnica de València, Ref. 22.