Las labores de extracción de material en obras subterráneas y túneles no es una tarea sencilla. Al poco espacio de maniobra hay que añadir los problemas derivados de la ventilación de espacios cerrados y problemas de seguridad y salud que afectan a los trabajadores.
Este tipo de cargadoras se desarrollan para las más duras aplicaciones subterráneas, con objetivos orientados a economizar la producción, incrementar la seguridad y fiabilidad. Este equipo de cargador LHD (load haul dump) es especialmente adecuado para trabajar debajo de condiciones difíciles, como estrechos, de baja altura y lugares de trabajo con lodo.
En este sentido, las cargadoras LHD, de perfil bajo, empleadas en este tipo de obras adquieren características especiales. Su diseño es compacto, tanto en altura como en anchura. Su radio de giro es mínimo (articuladas), lo que le permite una gran maniobrabilidad en zonas estrechas. Son muy productivas en recorridos cortos o medios (hasta 1000 m). Pueden ser de accionamiento eléctrico o mediante motores diésel.
Para distancias inferiores a unos 500 m y túneles de pequeña y mediana sección, se utiliza una pala con un cazo de gran capacidad (3m³) que carga el escombro del frente y lo lleva hasta el exterior. La máquina no gira, sentándose el maquinista de forma lateral para conducir en ambas direcciones. Para distancias mayores se utilizan zonas de acopio intermedio de escombros.
Con marcos optimizados, una fuerza motriz muy potente, avanzada tecnología de transmisión, tracción, controles de dirección articulados y ergonómicos, son extremadamente resistentes, muy maniobrables y excepcionalmente productivas. Estas máquinas presentan una capacidad de 1 a 25 toneladas.
Un cargador SANDVIK LH517. Wikipedia
Os paso varios vídeos para que podáis ver su funcionamiento. Espero que os gusten.
Referencias:
MARTÍ, J.V.; YEPES, V.; GONZÁLEZ, F.; ALCALÁ, J. (2012). Técnicas de voladuras y excavación en túneles. Apuntes de la Universitat Politècnica de València. Ref. 530, 165 pp.
YEPES, V. (2014). Maquinaria de movimiento de tierras. Apuntes de la Universitat Politècnica de València. 148 pp.
Las empresas constructoras cuentan con parques de maquinaria que gestionan las máquinas, equipos y piezas de repuesto. Estos parques varían en función del tamaño y naturaleza de la empresa constructora. Las grandes empresas cuentan con un gran parque central y con parques de zona de menor envergadura. El personal del parque representa entre el 5 y el 10% del total de la empresa, porcentajes que aumentan si se consideran a los operadores y a los maquinistas.
El dimensionamiento, organización y control de las existencias de un parque depende de la demanda de maquinaria por parte de cada obra y del plazo de entrega. Estos factores son conocidos a veces en términos de probabilidad y en otros casos son desconocidos. Los parques de maquinaria se constituyen en «embalses» reguladores que posibilitan el equilibrio entre los flujos reales de entrada y salida.
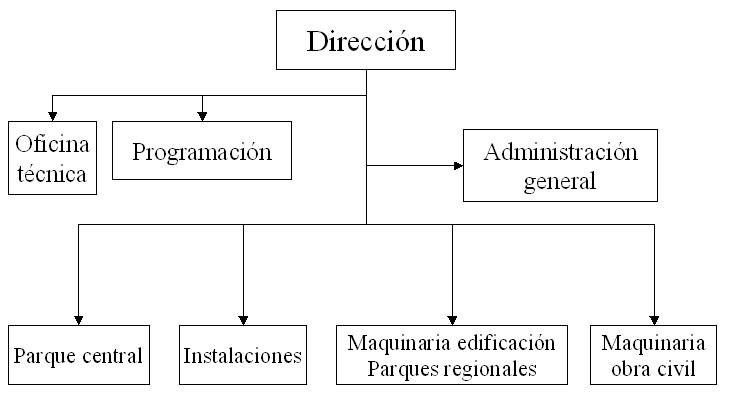
Figura. Ejemplo de modelo de organización de un parque de maquinaria
La estructura de un parque de maquinaria depende de la organización, dimensión, extensión geográfica, especialización y grado de mecanización de la empresa constructora. Entre las actividades que realiza el parque se encuentran la adquisición de máquinas, su mantenimiento y su enajenación cuando su empleo sea improductivo o innecesario. El parque se encuentra integrado completamente en la organización de algunas empresas, mientras que en otras actúa de forma independiente, pasando cargos a su propia empresa por el uso de la maquinaria.
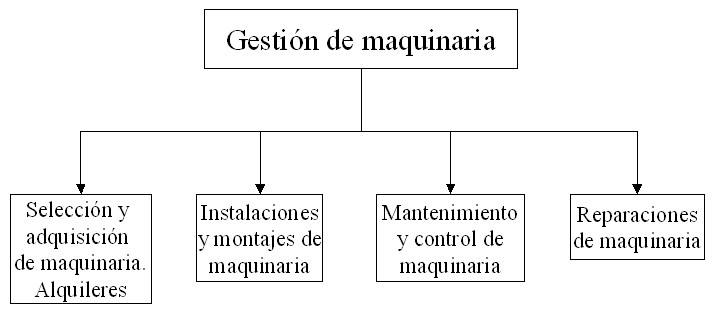
Un parque de maquinaria se organiza en un conjunto de departamento o secciones que típicamente podrían ser las siguientes:
Adquisiciones y coordinación: planifica la adquisición de máquinas basándose en las necesidades de renovación y en la evolución del mercado de la empresa, sin olvidar las necesidades concretas que surgen con la adjudicación de obras.
Documentación: tiene a su cargo todos los archivos de documentación tanto técnica como económica.
Conservación: planifica y controla los trabajos de mantenimiento de las máquinas tanto en obra como en taller.
Proyecto de instalaciones: el cometido es el estudio y la realización de todas las instalaciones que se precisen para las obras y para las licitaciones.
Inventarios y estadística: actualiza los inventarios de maquinaria.
Métodos: estudia las máquinas nuevas y su aplicación a las obras, los nuevos sistemas de máquinas ya conocidas, las pruebas con máquinas propias, etc.
Matriculaciones: se ocupa de la matriculación de las máquinas y vehículos de la empresa y de todas las gestiones relacionadas con ellos.
Figura. Gestión funcional del parque
Os dejo una mesa redonda sobre la visión de los parques de maquinaria, que espero os guste.
YEPES, V.; MEDINA, J.R. (2006). Big-Bang: Un nuevo algoritmo aplicado a la optimización de redes de transporte del tipo VRPTW.Actas del VII Congreso de Ingeniería del Transporte CIT-2006. Libro CD, 8 pp. Ciudad Real, 14-16 de junio. ISBN: 84-689-8341-1.
RESUMEN
La ponencia presenta un procedimiento de optimización económica de rutas de reparto con flotas de vehículos heterogéneas y horarios de servicio flexibles VRPHESTW. Para ello se presenta una nueva heurística, denominada “Big-Bang” basada en la modificación gradual de la variable espacial donde se ubican los nodos que representan a los clientes. La simulación de esta heurística de relajación consiste en reducir la velocidad de todos los vehículos, que al principio es muy alta para estabilizarse al final en su verdadera magnitud. El algoritmo emplea para explorar el espacio de soluciones una búsqueda probabilista en entornos variables con una aceptación de máximo gradiente. El algoritmo propuesto encuentra soluciones de elevada calidad, con la ventaja de poder utilizar otros procedimientos de búsqueda local que resulten más eficientes que el de máximo gradiente (algoritmo del solterón, aceptación por umbrales, búsqueda tabú, etc.).
INTRODUCCIÓN
La asignación de rutas de reparto a una flota de vehículos “Vehicle Routing Problem” (VRP) constituye un problema habitual en las empresas dedicadas a la distribución de bienes o personas que conlleva un impacto económico, social y medioambiental importante. Sin embargo, los problemas de optimización que representan numerosas situaciones reales sólo pueden resolverse mediante procedimientos aproximados debido a su elevada complejidad intrínseca (ver Ball et al., 1995).
En las últimas décadas se han aplicado una gran variedad de técnicas para optimizar el problema de las rutas con horarios de servicio “vehicle routing problem with time windows” (VRPTW), tanto con heurísticas de construcción de soluciones (ver Solomon, 1987) o de mejora (ver Potvin y Rousseau, 1995), como metaheurísticas (ver Homberger y Gehring, 2005; Russell y Chiang, 2006). Sin embargo, son escasas las publicaciones que abordan la optimización con modelos más cercanos a la realidad incorporando horarios de servicio flexibles “vehicle routing problem with soft time windows” (VRPSTW) (ver Taillard et al., 1997), flotas heterogéneas de vehículos “vehicle routing problem with a heterogeneous fleet of vehicles” (VRPHE) (ver Gendreau et al., 1999), o ambas “vehicle routing problem with a heterogeneous fleet of vehicles and soft time windows” (VRPHESTW) (ver Yepes y Medina, 2002, 2004, 2006).
Además, los problemas reales de rutas difieren significativamente de los problemas teóricos. En efecto, la optimización jerárquica empleada habitualmente en la literatura (donde las mejores soluciones son las que, en primer lugar, presentan un menor número de rutas; y posteriormente, una menor distancia recorrida por todos los vehículos), no representa adecuadamente los costes reales de las empresas ni sus políticas de tarifas. Yepes (2002) indicó la trascendencia de utilizar una función objetivo de tipo económico para resolver estos problemas ante cambios en los escenarios de tarifas y costes. Asimismo, las restricciones legales y sociales, así como la calidad del servicio también se deben incluir dentro de una función objetivo de tipo económico, que contemple los ingresos y los costes de las operaciones de transporte (Medina y Yepes, 2003).
En la ponencia se presenta una nueva heurística basada en la modificación gradual de la variable espacial donde se ubican los nodos que representan a los clientes, y que se ha denominado “Big-Bang”. Esta estrategia de relajación, a su vez, se anida en una variante de la búsqueda en entornos variables “Variable Neighborhood Search” (VNS) (ver Mladenovic y Hansen, 1997) apoyada en la elección probabilista de un operador distinto en cada movimiento, empleada con éxito en el trabajo de Yepes y Medina (2006). Todo ello se ensaya con un problema de rutas del tipo VRPHESTW donde, además, se emplea una función objetivo de tipo económico, unas jornadas laborables con distintos costes y con tiempos de viaje dependientes del tiempo de acceso y alejamiento a cada nodo (congestión, tráfico, etc.).
EL ALGORITMO BIG-BANG
El algoritmo Big-Bang que se propone parte de la siguiente idea: Si todos los vehículos tuviesen una velocidad mayor a la real, dicho fenómeno se podría interpretar como que los clientes se encuentran en un espacio donde, físicamente, las distancias fuesen menores. Un procedimiento de búsqueda encontraría un óptimo local en este escenario favorable a la reducción del número de vehículos. Si se desciende escalonadamente la velocidad, y en cada caso se encuentra su óptimo local, probablemente el nuevo óptimo sería similar al anterior, siempre que la disminución fuera suficientemente suave. Esta relajación de la velocidad se interrumpiría en el último escalón, donde el óptimo local encontrado satisfaría la velocidad real de los vehículos. El efecto sería un aumento gradual del espacio físico donde se ubican los clientes, efecto por el cual se ha querido llamar a la heurística algoritmo Big-Bang. En la situación inicial las restricciones fundamentales que condicionan el problema son la capacidad de los vehículos y los horarios de servicio. Al final, la lejanía entre los clientes y el almacén central, son condiciones que se han introducido progresivamente al final de la heurística.
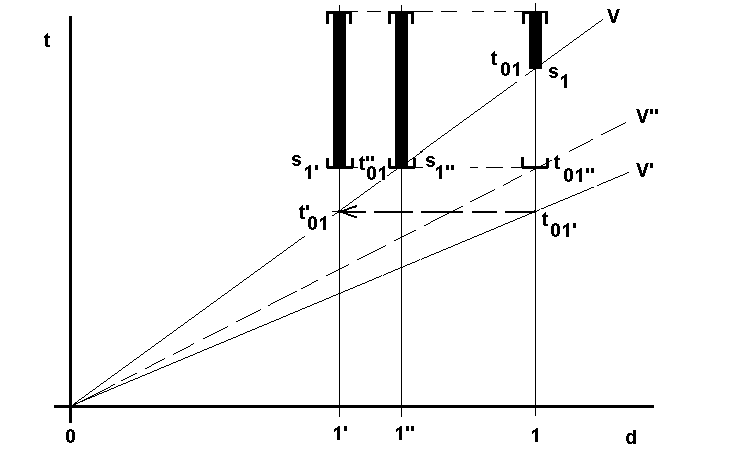
En efecto, un vehículo con una velocidad v llega de 0 a 1 en el instante t01 (ver Figura 1). Se supone, sin perder generalidad, que el tiempo de servicio es nulo. Si la velocidad se incrementase a v’, entonces la llegada ocurriría en t01’. Esta situación equivale a suponer que el nodo, en vez de estar en 1 está más cerca de 0, es decir, en 1’ y la velocidad se mantiene en v. Así, la llegada ocurre en el instante t’01, que es igual al t01’. Por tanto, un aumento en la rapidez de los vehículos es equivalente a un acortamiento físico de las distancias. Sin embargo, las ventanas temporales interfieren en el razonamiento anterior. La existencia de esperas provoca que, aunque la velocidad v’ favorece el acortamiento a la distancia 1’, no es posible iniciar el servicio puesto que lo impide la ventana temporal. La situación equivalente es la representada en la Figura 1 cuando el vehículo circula a una velocidad v’’. En este caso, el acortamiento de distancias a 1’ se ve interrumpido por la limitación en el inicio del servicio a la situación 1’’, donde el inicio del servicio s1’ es coincidente con el s1’’. La conclusión es que el aumento de la rapidez de los vehículos permite relajar las restricciones en las distancias, acortando éstas mientras las limitaciones horarias no lo impidan.
Fig. 1 – Incidencia en la variación de la velocidad de un vehículo en el inicio del servicio
Una de las características más interesantes de esta heurística de relajación consiste en la posibilidad de emplear como procedimientos de búsqueda local en cada escalón de velocidad, metaheurísticas más agresivas de búsqueda que la simple aceptación por umbrales (búsqueda tabú, algoritmo del solterón, cristalización simulada, etc.). En la ponencia que se presenta se ha optado por utilizar una búsqueda de máximo gradiente para comprobar la eficacia intrínseca del algoritmo, para no empañarla con la de otras metaheurísticas que por sí solas resultan, muy eficaces para el problema VRPHESTW (ver Yepes y Medina, 2004).
DESCRIPCIÓN DE LA METAHEURÍSTICA PROPUESTA
El método presentado consta de dos fases. En la primera se genera una solución inicial mediante una heurística de construcción de rutas específica. Posteriormente se emplea el algoritmo “Big-Bang” basándose en una versión probabilista de la búsqueda por entornos variables “Variable Neighborhood Search” (VNS) (ver Mladenovic y Hansen, 1997) y un criterio de aceptación de máximo gradiente.
3.1 Fase 1: Heurística económica de construcción secuencial de rutas.
Se ha empleado el método de Yepes y Medina (2006) para generar una solución inicial de elevada calidad al problema VRPHESTW. El procedimiento inicia una ruta seleccionando adecuadamente al primer cliente para posteriormente agregar otros mientras se cumplan las restricciones impuestas. Además, se elige el vehículo de mayor capacidad para disminuir en lo posible el número necesario.
3.2 Fase 2: Algoritmo “Big-Bang” con búsqueda probabilista en entornos variables.
El algoritmo que se propone consta de un número M+1 de ciclos de búsqueda local por entornos. Cada ciclo de búsqueda termina con la obtención de un óptimo relativo correspondiente con unas velocidades de los vehículos fijadas para dicho ciclo. En el primer ciclo, la velocidad de los vehículos se amplifica por un factor de incremento D= D1>1. Este factor debe reducirse progresivamente hasta llegar al último ciclo de búsqueda local, en el cual D =DM+1 =1. Para este trabajo, la reducción de la velocidad ha sido lineal con el número de ciclos; sin embargo, se podría adoptar otro tipo de función reductora.
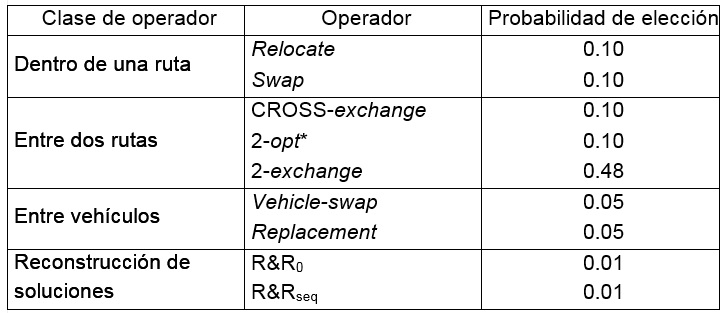
Como técnica de búsqueda local se ha empleado la metaheurística propuesta por Yepes y Medina (2006) para el problema VRPHESTW, de búsqueda por entornos variables basada en la elección probabilística de 9 operadores distintos y un criterio de aceptación por máximo gradiente. Los movimientos elegidos han sido los siguientes:
Movimientos dentro de una ruta: se emplea el operador relocate (un nodo salta a otro lugar dentro de la ruta) y el swap (dos nodos de la ruta se intercambian entre sí).
Movimientos entre dos rutas: se utiliza el operador CROSS-exchange (Taillard et al., 1997) y dos casos particulares, el movimiento 2-opt* (Potvin y Rousseau, 1995) y el 2-exchange (Osman, 1993).
Movimiento de vehículos: vehicle–swap cambia entre sí los vehículos de dos rutas, y replacement sustituye el vehículo de una ruta por otro de la flota que no está utilizándose.
Reconstrucción de soluciones: R&R0 desconecta un nodo al azar y lo introduce en la posición y ruta más favorable, mientras que R&Rseq rompe la ruta con menor número de nodos, y los reintroduce en la mejor posición y ruta (ver Schirmpf et al., 2000).
La Tabla 1 contiene las probabilidades que tiene cada operador de ser elegido. Dichos valores han ofrecido buenos resultados en experiencias anteriores (ver Yepes, 2002).
Tabla 1 – Probabilidad de elección de los operadores
EJEMPLO DE APLICACIÓN AL PROBLEMA VRPHESTW
Se analiza un problema del tipo VRPHESTW denominado HES-A descrito en Yepes y Medina (2004, 2006). Este caso deriva del ejemplo R103 de Solomon (1987), al cual se incorporan horarios flexibles de entrega, flotas heterogéneas y una función económica caracterizada por unos ingresos y unos costes fijos y variables. El lenguaje código utilizado ha sido Visual Basic 6.0 ejecutándose los ejemplos en un ordenador Pentium IV 3.00 GHz.
En las Figuras 2 y 3 se representa el beneficio obtenido y el tiempo empleado por la heurística descrita cuando se aplica al problema HES-A. El número de iteraciones empleadas para cada escalón de velocidad ha oscilado entre 1000 y 50000. Los escalones de velocidad ensayados varían entre 3 y 100. La mejor solución encontrada se corresponde con un beneficio de 164752, obtenida para un factor inicial de modificación de la velocidad D1=130, así como 30000 iteraciones en cada uno de los 30 escalones de velocidad considerados. Sin embargo, esta solución no atiende a todos los clientes (sólo el 96.70% de la demanda queda cubierta). La mejor solución que atiende toda la demanda se corresponde con un beneficio de 155184, obtenida para un D1=150, así como 50000 iteraciones en 100 escalones de velocidad. Destacamos cómo el algoritmo es capaz de aumentar el beneficio de las operaciones a costa de renunciar al servicio a determinados clientes. La mejor solución no factible sólo precisa 12 vehículos y recorre 1224.71 unidades de distancia total, frente a los 13 vehículos y las 1260.54 unidades de distancia de la mejor solución factible. Si se pretende servir toda la demanda, bastaría endurecer las penalizaciones en la función objetivo.
Fig. 2 – Beneficio obtenido para el problema HES-A con el algoritmo propuesto, analizado por el factor inicial de incremento de velocidadFig. 3 – Beneficio obtenido para el problema HES-A con el algoritmo propuesto, analizado por la factibilidad de la solución
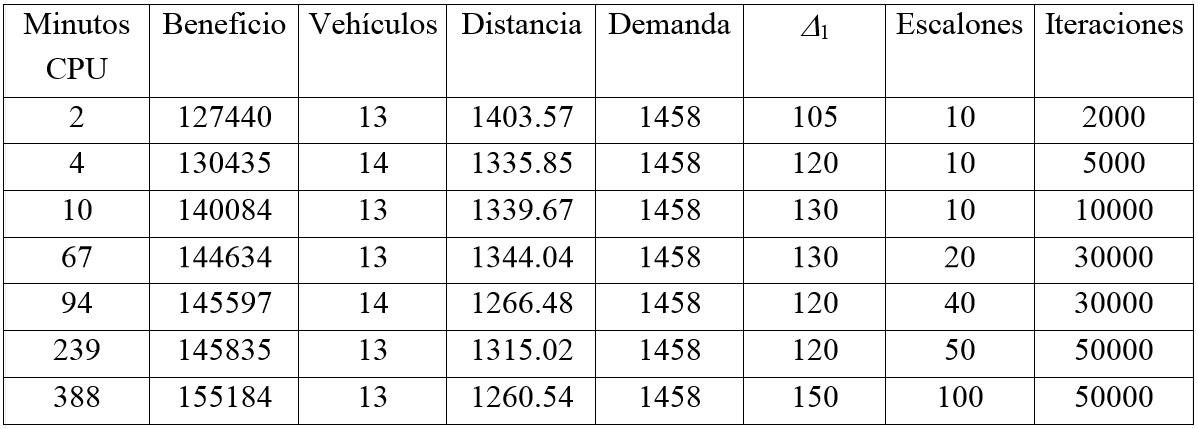
En la Tabla 2 se han recogido los valores óptimos en el sentido de Pareto de las soluciones factibles (ver Voorneveld, 2003). Dichos óptimos se corresponden con los valores de mayor beneficio en el menor tiempo de cálculo posible. Se observa que es favorable el aumento del factor de modificación inicial de la velocidad, del número de escalones y del número de iteraciones. Sin embargo, ello comporta un mayor tiempo de cálculo.
Tabla 2 – Resultados óptimos de Pareto para el problema HES-A, para las soluciones factibles
El mejor resultado obtenido por esta metaheurística (ver Tabla 3) es inferior al encontrado por el algoritmo del solterón propuesto por Yepes y Medina (2004) para un tiempo de cálculo similar. En aquella ocasión se obtuvo un beneficio de 170335, con 13 vehículos que recorrieron un total de 1229.13 unidades de distancia. Esta circunstancia sugiere que la búsqueda local de máximo gradiente empleada podría sustituirse por un algoritmo de búsqueda más agresiva, como el algoritmo del solterón.
Tabla 3 – Resultados obtenidos para el problema HES-A
CONCLUSIONES
Se ha presentado una nueva heurística denominada “Big-Bang” basada en la modificación gradual de la variable espacial donde se ubican los nodos que representan los clientes. Esta estrategia de relajación consiste en reducir progresivamente, de forma escalonada, la velocidad de todos los vehículos, de forma que, al final del proceso, todos dicha velocidad sea la que corresponde con las restricciones del problema. Este procedimiento permite una fuerte tendencia hacia la reducción inicial del número de vehículos necesarios. En la ponencia se ha empleado este procedimiento para la resolución del problema VRPHESTW. Como estrategia de búsqueda local se ha empleado un esquema de búsqueda aleatoria en entornos variables, que emplea de forma probabilista un conjunto de 9 operadores y un criterio de aceptación de nuevas soluciones de máximo gradiente. En los ensayos se ha comprobado que un aumento en el factor de incremento inicial de la temperatura, del número de escalones, y de las iteraciones proporciona un incremento en la calidad de las soluciones, si bien con un mayor tiempo de cálculo. Los resultados obtenidos son de elevada calidad, si bien se sugiere el empleo de procedimientos de búsqueda local más agresivos, como por ejemplo el algoritmo del solterón, que ha dado muy buenos resultados para la resolución de este problema.
AGRADECIMIENTOS
Los autores agradecen el apoyo en este trabajo del Ministerio de Educación y Ciencia y de los fondos FEDER (Proyectos: BIA2005-03197 y REN2002-02951).
REFERENCIAS
BALL, M.O.; MAGNANTI, T.L.; MONNA, C.L.; NEMHAUSER, G.L. (Eds.) (1995). Network Routing, Handbooks in Operations Research and Management Science, vol. 8. North-Holland, Amsterdam.
GENDREAU, M.; LAPORTE, G.; MUSARAGNY, C.; TAILLARD, É.D. (1999). A tabu search heuristic for the heterogeneous fleet vehicle routing problem. Computers and Operations Research 26, pp. 1153-1173.
HOMBERGER, J.; GEHRING, H. (2005). A two-phase hybrid metaheuristic for the vehicle routing problem with time windows. European Journal of Operational Research 162, pp. 220-238.
MEDINA, J.R.; YEPES, V. (2003). Optimization of touristic distribution networks using genetic algorithms. Statistics and Operations Research Transactions 27(1), pp. 95-112.
MLADENOVIC, N.; HANSEN, P. (1997). Variable neighborhood search. Computer and Operations Research 24(11) pp. 1097-1100.
OSMAN, I.H. (1993). Metastrategy simulated annealing and tabu search algorithms for the vehicle routing problem. Annals of Operations Research 41, pp. 421-451.
POTVIN, J.Y.; ROUSSEAU, J.M. (1995). An exchange heuristic for routing problems with time windows. J. Operational Res. Soc. 46(12), pp. 1433-1446.
RUSSELL, R.A.; CHIANG, W.C. (2006). Scatter search for the vehicle routing problem with time windows. European Journal of Operations Research 169, pp.606-622.
SCHIRMPF, G.; SCHENIDER, J.; STAMM-WILBRANDT, H.; DUECK, G. (2000). Record breaking optimization results using the ruin and recreate principle. Journal of Computation Physics 159, pp. 139-171.
SOLOMON, M.M. (1987). Algorithms for the vehicle routing and scheduling problems with time window constraints. Operations Research 35(2), pp. 254-265.
TAILLARD, É.; BADEAU, P.; GENDREAU, M.; GUERTIN, F.; POTVIN, J.-Y. (1997). A tabu search heuristic for the vehicle routing problem with soft time windows. Transportation Science 31(2), pp. 170-186.
VOORNEVELD, M. (2003). Characterization of Pareto dominance. Operations Research Letters 31, pp. 7-11.
YEPES, V. (2002). Optimización heurística económica aplicada a las redes de transporte del tipo VRPTW. Tesis doctoral. Universidad Politécnica de Valencia. 352 pp.
YEPES, V.; MEDINA, J.R. (2002). Criterio económico para la optimización de rutas con flotas heterogéneas VRPHESTW, en Ibeas, A. y Díaz, J.M. (Eds.): Actas del V Congreso de Ingeniería del Transporte. Vol. 2, pp. 693-700. Santander, 11-13 junio.
YEPES, V.; MEDINA, J.R. (2004). Algoritmo del solterón aplicado a la optimización de rutas con flotas heterogéneas VPRHESTW, en Larrodé, E. y Castejón, L. (Eds.): Actas del VI Congreso de Ingeniería del Transporte. Vol. 2, pp. 759-766. Zaragoza, 23-25 de junio.
YEPES, V.; MEDINA, J.R. (2006). Economic heuristic optimization for heterogeneous fleet VRPHESTW. Journal of Transportation Engineering, ASCE 132(4), pp. 303-311.
El post de hoy va dedicado a aquellos de vosotros que os dedicáis a la investigación científica. Vamos a hablar de ORCID, que es un proyecto abierto, sin ánimo de lucro, comunitario, que ofrece un sistema para crear y mantener un registro único de investigadores y un método claro para vincular las actividades de investigación y los productos de estos identificadores. ORCID es único por su capacidad de aplicarse a todas las disciplinas, sectores de investigación y fronteras nacionales. Es un centro que conecta a los investigadores y la investigación a través de la incorporación de identificadores ORCID en flujos de trabajo clave, tales como el mantenimiento de los perfiles de investigación, las presentaciones manuscritas, las solicitudes de subvención y las solicitudes de patentes.
En mi caso particular, mis registros de investigador son los siguientes:
Los compactadores habituales de zanjas consisten en un vehículo con una rueda vibrante adosada. La rueda compacta el fondo de la zanja a medida que el vehículo se desplaza. Las ruedas pueden ser lisas o de patas apisonadoras. Normalmente, son accesorios que se adaptan a excavadoras, aunque hay máquinas específicas al efecto.
La rueda compactadora apisona superficies después de instalar líneas de corriente o conductos de agua y otras zanjas poco profundas en patios, campos de golf, etc. Este compactador con ruedas comprime la superficie de zanjas de 10 a 30 cm de ancho y de hasta 122 cm de profundidad. La caja de vibración aislada ofrece un doble engranaje bañado en aceite para que su vida útil sea larga y no presente problemas.
A continuación podéis ver un vídeo de una rueda compactadora con patas apisonadoras.
Estas grúas de puerto mantienen la cota de la carga por medio de un sistema de articulaciones que hace que la pluma de la grúa funcione como un mecanismo. El desplazamiento del pórtico y el giro de la superestructura es similar a las giratorias de cable compensado.
El giro se consigue mediante un grupo moto-reductor fijado en el lateral del castillete y una corona dentada fija en la parte superior del pivote. Este dispositivo permite un giro de 360º controlado por la botonera de mando. Este mecanismo, además de hacer girar la superestructura de la grúa, debe controlar el momento de vuelco debido a la excentricidad de la carga y peso propios.
El mecanismo que mantiene la cota de la carga es automático, de forma que no es necesario actuar sobre el cable de elevación. El movimiento de cambio de alcance, al igual que el resto de movimientos que caracterizan este modelo de grúa, se realiza mediante manipuladores progresivos y electroválvulas proporcionales, dotando a la grúa de movimientos con velocidad variable y controlada. La cabina de control se sitúa en la parte frontal de la superestructura.
Referencia:
YEPES, V.; MARTÍ, J.V. (2017). Máquinas, cables y grúas empleados en la construcción. Editorial de la Universitat Politècnica de València. Ref. 814. Valencia, 210 pp.
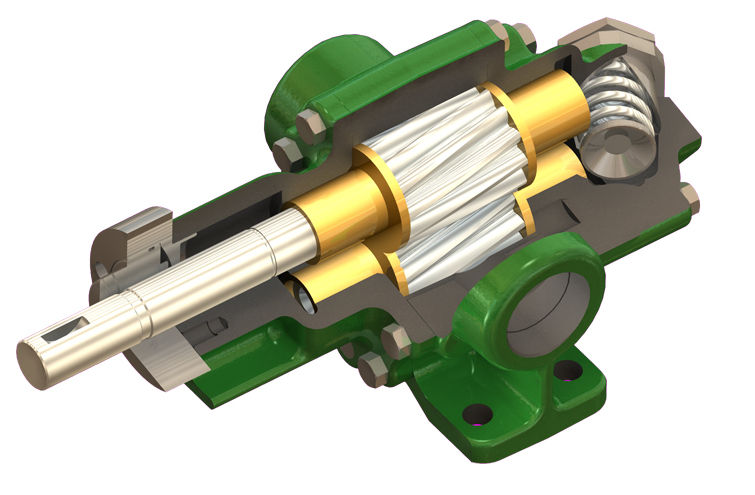
Una bomba es una máquina destinada al transporte y elevación de líquidos, para lo cual absorbe fluido dentro de sí misma a través de un orificio de entrada y lo impulsa hacia fuera a través de una lumbrera de salida. Para accionarlas precisan de la energía proporcionada por un motor, que suele ser en la mayoría de los casos eléctricos, y en otros de combustión.
En ingeniería civil son empleadas para la elevación de agua de pozos para el abastecimiento de poblaciones, agotamientos de niveles freáticos, aspiración de fondos marinos, bombeos de líquidos de un lugar a otro, elevación de aguas negras, etc.
Los parámetros básicos necesarios para seleccionar una bomba son los siguientes:
El caudal de diseño.
Los parámetros que definen el líquido a transportar.
La altura manométrica en el caso de una instalación de bombeo o las necesidades de oxígeno si se trata de un agitador para una planta depuradora.
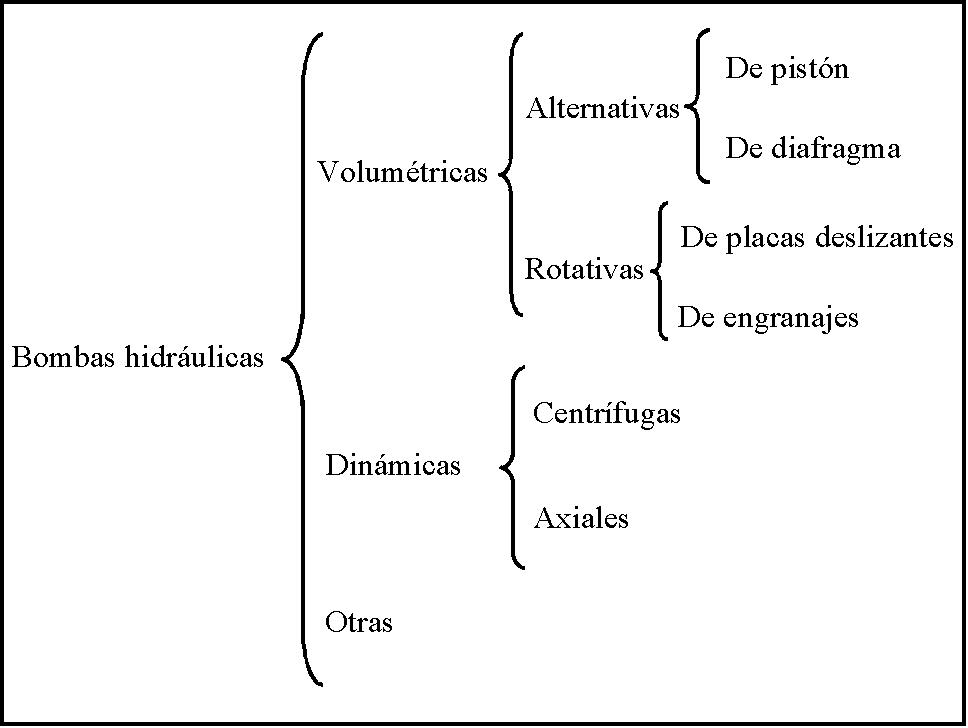
Las bombas se pueden clasificar atendiendo a diversos criterios. En la figura siguiente se establece la clasificación habitual de las bombas atendiendo a su forma de trabajo.
Clasificación de las bombas hidráulicas
Otra posible clasificación se establece atendiendo al régimen de funcionamiento:
Bombas de caudal constante: donde el caudal de salida es proporcional al régimen de giro de la bomba, es decir, que el caudal de líquido desplazado por cada revolución es fijo. Estas máquinas no consideran la necesidad de presión del sistema y por tanto debe existir un medio capaz de reconducir el caudal sobrante. Las bombas de engranajes son de caudal constante.
Bombas de caudal variable: el caudal a la salida es independiente de la velocidad de la bomba, por lo que el caudal de líquido desplazado por cada revolución es variable. En este caso el caudal desplazado es el que necesita el sistema. Las bombas de paletas y pistones pueden ser tanto de caudal constante como variable.
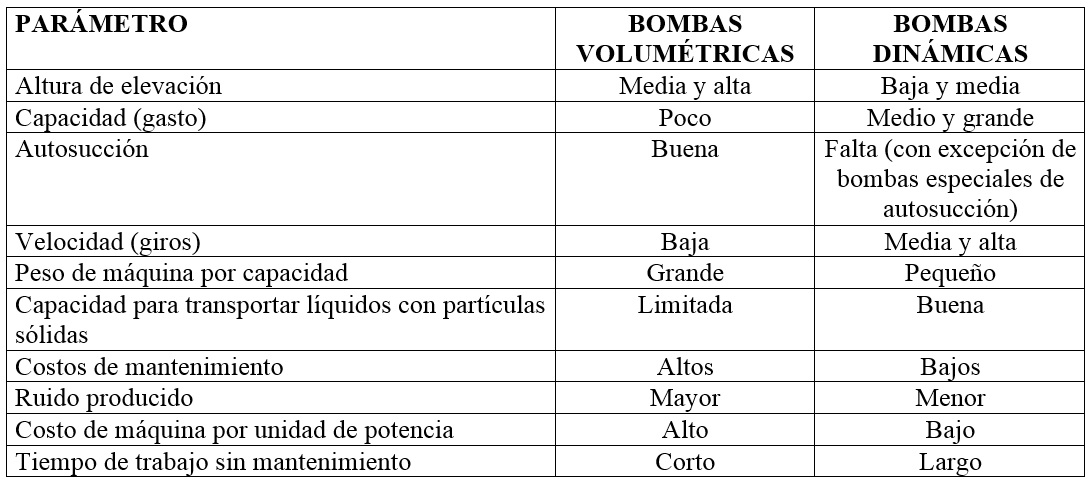
En la Tabla siguiente se comparan las características más importantes de las bombas hidráulicas.
Comparación de las propiedades generales de las bombas
Os dejo uno vídeos explicativos sobre este tema.
Referencia:
YEPES, V.; MARTÍ, J.V. (2017). Máquinas, cables y grúas empleados en la construcción. Editorial de la Universitat Politècnica de València. Ref. 814. Valencia, 210 pp.
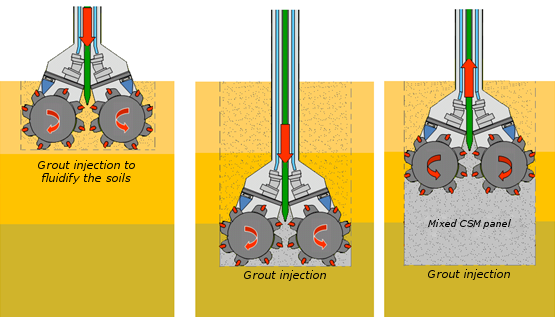
La pantalla de suelo-cemento con hidrofresa (cutter soil mixing) es una técnica de mejora de suelos que se emplea para generar pantallas impermeabilizantes verticales mediante el uso de hidrofresas. Consiste en excavar el terreno en paneles verticales mediante una cabeza cortadora (hidrofresa) suspendida de un brazo grúa articulado. Esta cabeza presenta dos elementos cortantes giratorios provistos de dientes de corte que giran en direcciones opuestas para expulsar el material excavado.
La cabeza también posee un inyector, en la parte central de las dos ruedas cortantes, por el cual se inyecta una mezcla de bentonita-cemento. Esta mezcla, gracias al movimiento giratorio de los dientes y de unas paletas giratorias, se amalgama con los detritos formando un nuevo material. Tras el fraguado del cemento se obtiene una pantalla impermeable. La ventaja del método es que se usa el propio material del terreno, no generando apenas residuos.
En pantallas poco profundas, de menos de 20 m, se ejecuta en una fase, que consiste en inyectar la bentonita-cemento según se tritura el terreno. Se usa con tiempos cortos de perforación para que no fragüe el cemento. En mayores profundidades se usan dos fases; en la primera se excava hasta la cota deseada y luego durante el ascenso se inyecta la mezcla.
Para ejecutar muros continuos, se divide la construcción en paneles primarios y secundarios, que se solapan con los anteriores con juntas frescas si los paneles primarios no han fraguado, o bien con solapes duros si ya han endurecido.
Os dejo un caso de estudio de la empresa Bauer, que espero que os sea de utilidad.
MARTÍ, J.V.; GONZÁLEZ, F.; YEPES, V. (2004). Temas de procedimientos de construcción. Mejora de terrenos.Editorial de la Universidad Politécnica de Valencia. Ref. 2004.844.
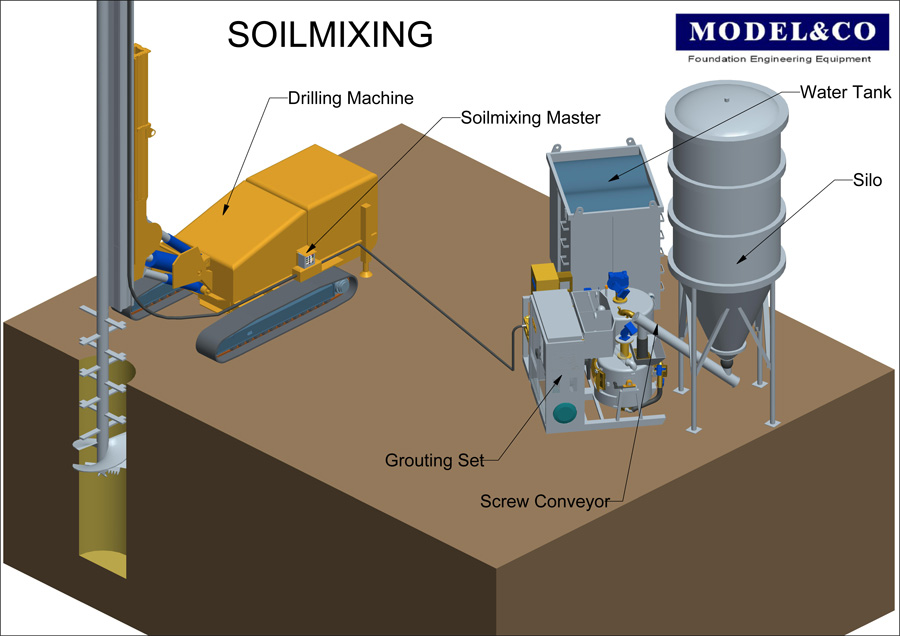
Esta técnica de mejora y refuerzo de suelos blandos o flojos consiste en el mezclado mecánico y profundo de los materiales disgregados del terreno con un aglomerante, líquido o sólido, generando un nuevo material tipo suelo-cemento. El aglomerante suele ser cemento, cal y bentonita. El terreno así estabilizado es más resistente, menos permeable y de menor compresibilidad que el terreno original.
La incorporación de los aglomerantes al terreno puede llevarse a cabo en forma de lechada (Método húmedo) o mediante aire comprimido (Método seco). Para cada caso es necesaria la utilización de una herramienta especial que permita la ejecución de la mezcla en profundidad.
La mezcla profunda de suelos se puede clasificar en dos grupos: mezclado vertical, generando columnas o en masa horizontal, produciendo fajas o extensiones importantes en plantas.
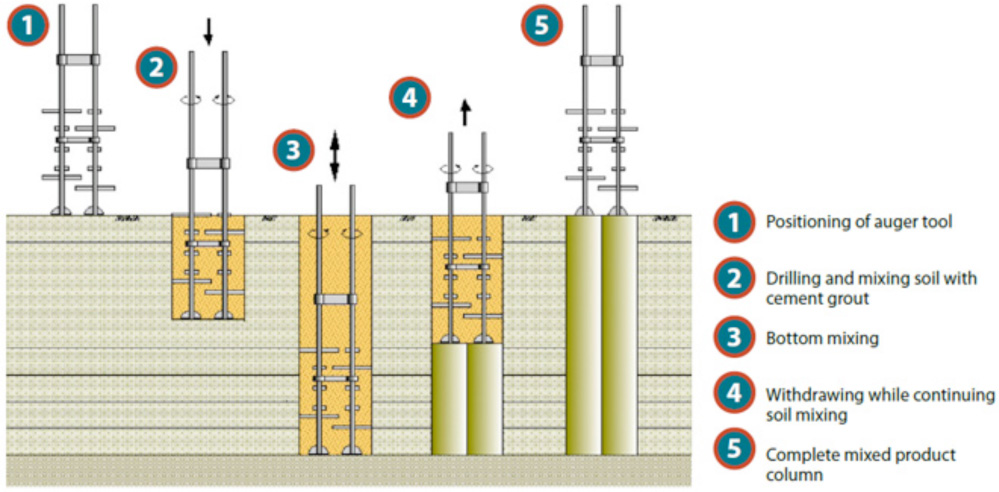
En el caso de mezclado vertical, el diámetro de la columna es constante en profundidad y depende de la capacidad de la herramienta y el método que se utilice (húmedo o seco). Se ejecuta con una mezcladora giratoria que perfora el terreno hasta la profundidad requerida. En ese momento empieza la inyección del aglomerante mientras se extrae el varillaje.
http://jafecusa.com/?page_id=2796
La técnica de mezclado en masa consiste en una retroexcavadora en la que el brazo de la pala sustituye por un brazo excavador con un cabezal rotatorio que posee un inyector por el que se impulsa la mezcla aglomerante. Este método utiliza equipos no complejos: una retroexcavadora y una bomba de inyección. Es rápido en la ejecución, pero su uso se limita a la longitud del brazo, que no suele ser superior a 5 m.
Os dejo un folleto de la empres Bauer donde se explica con mayor detalle este procedimiento constructivo.
A continuación os dejo varios vídeos y animaciones al respecto.
Referencias:
MARTÍ, J.V.; GONZÁLEZ, F.; YEPES, V. (2004). Temas de procedimientos de construcción. Mejora de terrenos.Editorial de la Universidad Politécnica de Valencia. Ref. 2004.844.




 YEPES, V.; MEDINA, J.R. (2006). Big-Bang: Un nuevo algoritmo aplicado a la optimización de redes de transporte del tipo VRPTW. Actas del VII Congreso de Ingeniería del Transporte CIT-2006. Libro CD, 8 pp. Ciudad Real, 14-16 de junio. ISBN: 84-689-8341-1.
YEPES, V.; MEDINA, J.R. (2006). Big-Bang: Un nuevo algoritmo aplicado a la optimización de redes de transporte del tipo VRPTW. Actas del VII Congreso de Ingeniería del Transporte CIT-2006. Libro CD, 8 pp. Ciudad Real, 14-16 de junio. ISBN: 84-689-8341-1.