El aglomerado asfáltico está sometido a un proceso de envejecimiento y descomposición, ya sea por exposición constante del agua, cargas extremadamente pesadas o desgaste de la base. Los baches constituyen una molestia si se dejan sin reparar, presentan un peligro elevado en la seguridad vial y presentan altos costes de mantenimiento.
Una forma innovadora de reparar los baches sin impactar negativamente en la circulación de los vehículos es la solución que presenta la empresa Amey. Se trata de unos camiones con un brazo robótico extensible que, en cuestión de pocos minutos, permite la reparación de estos desperfectos en el pavimento.
El sistema está formado por un camión de 18 toneladas equipado con una tolva alargada donde se almacenan los áridos y un depósito para el ligante bituminoso. También está equipado con un brazo articulado controlado de forma hidráulica que, cuando no está en uso, se encuentra plegado en la parte delantera del camión para el transporte más seguro.
Amey destaca que la máquina puede reparar un bache en apenas dos minutos, en lugar de la hora que emplearía un método convencional. Esta reparación puede tener una vida útil de, al menos, doce meses.
Pero lo mejor será dejar un vídeo donde podemos ver el funcionamiento del sistema. Espero que os guste.
Figura. Pilote CPI-4 en el puente sobre el río Yeaguas, Casariche (Sevilla). http://www.pilotessondepoz.com
El pilote CPI-4 de la NTE es un tipo de pilote perforado y hormigonado “in situ” de entubación recuperable con extracción de tierras. Se recomiendan en terrenos que por su consistencia sufren desprendimientos y se desmoronan durante la excavación, ya sea por la baja consistencia del terreno o por la presencia del nivel freático. Son habituales diámetros de 450 mm a 2.000 mm.
La excavación en terrenos blandos y medios se realiza mediante el uso de barrenas de hélice cortas. En caso de terrenos más duros se hace necesaria la inclusión en la barrena de dientes con puntas de widia. En terrenos muy competentes y roca se utiliza una corona circular con puntas de widia.
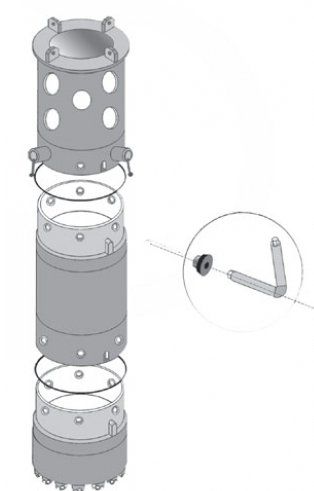
Pilote CPI-4. http://www.pilotesyobras.comCamisa de enchufe rápido
La principal particularidad de los pilotes CPI-4 consiste en que mientras se perfora se va introduciendo en el terreno una tubería de sostenimiento, también denominada camisa. Estas camisas son muy robustas, sirviendo no solo para contener el terreno, sino también como útil de perforación. Los primeros metros de la perforación se efectúan por hinca con tapón de grava. Una vez alcanza la profundidad objetivo se procede a la limpieza del fondo de la excavación mediante el uso de un cazo (“bucket”).
Posteriormente, al limpiado del fondo, se procede a introducir la armadura de acero con la ayuda de un equipo auxiliar (grúa). Para garantizar el recubrimiento mínimo necesario de la misma, se levanta 20 cm sobre el fondo de la excavación y se colocan separadores para su correcto centrado.
Colocada la armadura, comienza el hormigonado y se extraerá la entubación, de manera que siempre quede un mínimo de dos diámetros de hormigón dentro de ella. Para verter el hormigón dentro de la perforación correctamente evitando segregaciones y exudaciones, se utiliza un tubo “Tremie”. Este tubo se introduce por dentro de la armadura hasta alcanzar el fondo de la perforación. A continuación, se comienza a bombear el hormigón que debe ser de consistencia fluida.
A la vez que avanza la fase de hormigonado se va subiendo simultáneamente el tubo tremie, pero teniendo la precaución de mantenerlo siempre unos dos metros introducido en el hormigón fresco. A la vez, se va extrayendo la tubería de sostenimiento, manteniéndola siempre por debajo del nivel del hormigón fresco. Así, se consigue evitar cortes en el hormigonado por el desprendimiento de las paredes de la perforación. Cuando el hormigón alcanza la cota de la rasante del terreno se concluye con el hormigonado.
Este tipo de pilote muy recomendable para empotramientos en roca, pilotes a perforar en zonas con bolos, estratos cementados, en incluso en zonas con rellenos muy heterogéneos como escolleras. También se utiliza para la ejecución de pilotes bajo el nivel del agua, tal y como se aprecia en la siguiente fotografía de la construcción del puente en el sur de Guayaquil (Ecuador).
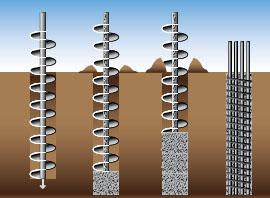
El Pilote CPI-8 es un pilote perforado con barrena continua tipo hélice hasta la profundidad solicitada (“Continuous Flight Auger”, CFA). Se trata de un pilote muy usado en España, siempre que tratemos con terrenos flojos, como arenas o arcillas. Se hormigona a través del núcleo de la barrena, mientras esta se va extrayendo, para posteriormente colocar la armadura en hormigón fresco con el apoyo de un vibrador hidráulico (lo cual implica una consistencia blanda del hormigón). La punta de la barrena queda introducida varios diámetros dentro del hormigón durante su puesta en obra. Este procedimiento resulta muy interesante respecto a otras tipologías en cuanto al tiempo de ejecución. Los diámetros habituales son de 350 a 1200 mm.
Se recomienda una dosificación mínima de cemento de 380 kg/m³ y un cono de 18 a 20 cm, con un árido máximo de 12 mm si es de cantera y 20 mm si es de gravera. Es muy importante garantizar una correcta bombealibidad del hormigón para introducirlo a través de la barrena.
El pilote CPI-8 presenta numerosas ventajas que hacen que sea una tipología muy empleada en cimentaciones profundas. Entre otras se pueden destacar las siguientes:
• No es necesario el uso de una entubación o de lodos tixotrópicos en terrenos inestables, pues la propia barrena permite la contención del terreno.
• Se puede controlar en todo momento la presión y volumen de hormigonado.
• Permiten realizar el empotramiento del pilote en estratos consistentes.
• Elevado rendimiento, lo que permite plazos de obra muy razonables.
En cuanto a las fases de ejecución, son las propias del pilotaje con barrena continua:
• Posicionamiento y aplome de la máquina para garantizar la verticalidad en la perforación.
• Perforación hasta la profundidad especificada.
• Bombeo del hormigón por el interior de la barrena y extracción simultánea de la barrena helicoidal, que lleva alojada en sus álabes el terreno perforado. El hormigón se encuentra en todo momento en contacto con la barrena helicoidal. Debe combinarse la velocidad de ascensión de la barrena, el caudal y la presión del hormigón para evitar cortes en el fuste del pilote o sobre secciones y excesos de hormigón innecesarios.
• Colocación de la armadura en el hormigón.
A continuación tenéis un Polimedia donde se explica la construcción de este tipo de pilotes.
Os dejo una colección de vídeos, algunos seleccionados por Juan José Rosas en su blog, que espero que os gusten.
Si tuviésemos que hablar de la historia de la planificación y control de las obras, deberíamos referirnos a la primera de las construcciones realizadas por el hombre y perdida en el origen de nuestra especie. Construcciones como las pirámides de Egipto no pudieron construirse sin un plan previo y una compleja organización de recursos. No obstante, al emplear las técnicas de planificación actuales, podemos acortar nuestra retrospectiva a aproximadamente medio siglo atrás en Estados Unidos. Tanto en el ámbito militar como en el civil, de manera independiente, se establecieron los fundamentos de las técnicas basadas en el método del camino crítico (Critical Path Method, CPM) y en el método PERT (Program Evaluation and Review Technique). La planificación y programación de proyectos complejos, sobre todo grandes proyectos unitarios no repetitivos, comenzó a ser motivo de especial atención al final de la Segunda Guerra Mundial, donde el diagrama de barras de Henry Gantt era la única herramienta de planificación de la que se disponía, que fue un método innovador en su momento, pero muy limitado. Gannt publicó en 1916 “Work, Wages, and Profits”, un texto donde discutía estos aspectos de planificación y otros relacionados con la productividad. De todos modos, para ser más exactos, Gantt no fue el pionero en el uso de esta herramienta. Otros autores como Joseph Priestley en 1765 o William Playfair en 1786, ya había sugerido ideas precursoras, que el ingeniero Karol Adamiecki desarrolló en 1896 en lo que él llamó como “Harmonograma”. También deberíamos destacar aquí los primeros intentos desarrollados, entre 1955 y 1957, por la “Imperial Chemical Industries” y el “Central Electricity Generating Board”, en el Reino Unido, donde se desarrolló una técnica capaz de identificar la secuencia de estados más larga e irreductible para la ejecución de un trabajo, en línea con lo que después se llamaría CPM (Crítical Path Method). Estas empresas consiguieron ahorros de tiempo en torno al 40%, pero debido a que no se publicaron estas innovaciones, cayeron en la oscuridad, de la cual se despertó con los avances que se desarrollaron al otro lado del océano.
Si bien al principio PERT y CPM tenían algunas diferencias importantes, con el tiempo, ambas técnicas se han fusionado, de modo que hoy día se habla de estos procedimientos como PERT/CPM. El PERT supone que el tiempo para realizar cada una de las actividades es una variable aleatoria descrita por una distribución de probabilidad. El CPM, por otra parte, infiere que los tiempos de las actividades se conocen en forma determinística y se pueden variar cambiando el nivel de recursos utilizados. Ambos métodos aportaron los elementos necesarios para conformar el método del camino crítico actual, empleando el control de los tiempos de ejecución y los costes de operación, para ejecutar un proyecto en el menor tiempo y coste posible. PERT/CPM se basan en diagramas de redes capaces de identificar las interrelaciones entre las tareas y establecen el momento adecuado para su realización. Además, permiten preparar el calendario del proyecto y determinar los caminos críticos. El camino crítico es, en esencia, la ruta que representa el cuello de botella de un proyecto. La reducción del plazo total de ejecución será solo posible si se encuentra la forma de abreviar las actividades situadas en dicho camino, pues el tiempo necesario para ejecutar las actividades no críticas no incide en la duración total del proyecto. La principal diferencia entre PERT y CPM es la manera en que se realizan los estimados de tiempo. En artículos anteriores hemos explicado mediante sendos vídeos las mecánicas de cálculo de los diagramas de flechas y del propio PERT.
El origen del CPM se sitúa entre diciembre de 1956 y febrero de 1959. En aquellos momentos, la compañía norteamericana E.I. du Pont (DuPont) estaba buscando cómo utilizar uno de los primeros ordenadores comerciales, el “UNIVAC1”. Los gestores de DuPont se dieron cuenta de que planificar, estimar y programar parecía ser el mejor uso que la empresa podría darle a este ordenador. Este trabajo se asignó a Morgan Walker, de la Engineering Services Division de Du Pont, que junto con el matemático James E. Kelley, Jr, que trabajaba en Remington Rand, consiguieron poner a punto el método, con el objetivo de controlar el mantenimiento de los proyectos de plantas químicas de DuPont. A mediados de 1957, esta empresa estaba interesada en ampliar cerca de 300 fábricas, lo cual implicaba un gran número de actividades (por lo menos unas 30000) lo cual no se podía abordar con los diagramas de Gantt. El objetivo era controlar y optimizar los costos de operación de las actividades de un proyecto. En este método, cada una de las tareas tenía una duración exacta, conocida de antemano.
Ordenador digital UNIVAC1. https://museo.inf.upv.es/univac2/William Francis Raborn (1905-1990) Militar estadounidense.
El origen de los trabajos de la técnica PERT empezaron formalmente en enero de 1957, siendo paralelo al del CPM, pero su origen fue en el ámbito militar. Se desarrolló en la Oficina de Proyectos Especiales de la Armada de los EEUU, al reconocer el almirante William. F. Raborn que se necesitaba una planificación integrada y un sistema de control fiable para el programa de misiles balísticos Polaris. Con su apoyo se estableció un equipo de investigación para desarrollar el PERT o “Program Evaluation Research Task”. Así, la Oficina de Proyectos Especiales de la Marina de los Estados Unidos de América, en colaboración con la división de Sistemas de Misiles Lockheed (fabricantes de proyectiles balísticos) y la consultora Booz, Allen & Hamilton (ingenieros consultores), se plantean un nuevo método para solucionar el problema de planificación, programación y control del proyecto de construcción de submarinos atómicos armados con proyectiles «Polaris». Este proyecto involucra la coordinación y supervisión de 250 empresas, 9,000 subcontratistas y numerosas agencias gubernamentales a lo largo de cinco años. En julio de 1958 se publica el primer informe del programa al que denominan “Program Evaluation and Review Technique”, decidiendo su aplicación en octubre del mismo año y consiguiendo un adelanto de dos años sobre los cinco previstos. D. G. Malcolm, J. H. Roseboom, C. E. Clark y W. Fazar, todos del equipo de investigación patrocinado por la Armada, fueron los autores del primer documento publicado sobre el PERT (Malcolm et al., 1959). Este método se basa en la probabilidad de la duración de las actividades. Hoy día se sigue utilizando este método, si bien, tal y como apuntan algunos autores (ver Ahuja et al., 1995), la estimación calculada por PERT suele subestimar la duración real de los proyectos.
REFERENCIAS
AHUJA, H; DOZZI, S.P.; ABOURIZK, S.M. (1995). Project management techniques in planning and controlling construction projects. 2nd edition, Wiley, N.Y.
CLARK, C.E. (1962). The PERT model for the distribution of an activity time. Operations Research, 10(3):405-406.
MALCOLM, D.G.; ROSEBOOM, J.H.; CLARK, C.E.; FAZAR, W. (1959). Application of a technique for research and development program evaluation. Operations Research, 11(5):646-669.
YEPES, V.; PELLICER, E. (2008). Resources Management, in Pellicer, E. et al.: Construction Management. Construction Managers’ Library Leonardo da Vinci: PL/06/B/F/PP/174014. Ed. Warsaw University of Technology, pp. 165-188. ISBN: 83-89780-48-8.
PELLICER, E.; YEPES, V.; TEIXEIRA, J.C.; MOURA, H.P.; CATALÁ, J. (2014). Construction Management. Wiley Blackwell, 316 pp. ISBN: 978-1-118-53957-6.
En un post anterior comentamos los problemas de calidad que podía tener un proyecto, incluso se apuntó la posibilidad de utilizar una norma, la ISO 10006 para poder controlar dichos problemas. Pero, ¿sabemos de verdad lo que es la calidad en un proyecto de construcción? Vamos a dar un par de pinceladas al tema para aproximarnos a este tema tan importante. Espero que podáis aportar ideas al respecto.
Podemos definir un proyecto como la acción de “idear, trazar o proponer el plan y los medios para la ejecución de algo” (acepción 2ª de “proyectar” del Diccionario de la Lengua Española, en adelante D.R.A.E.). Esta definición es la más utilizada en ingeniería industrial así como en el mundo sajón (“project” o “project management”) y está muy ligada conceptualmente a la gestión de proyectos. Continue reading «Aproximación al concepto de calidad en el proceso proyecto-construcción»→
El paradigma de la máquina empleada en ingeniería civil es la topadora, explanadora, buldócer, o como lo conocemos habitualmente en inglés, el bulldozer. Aunque se trata de un tractor sobre cadenas, también podemos encontrarlo sobre neumáticos (turnadozer), aunque es más raro. Pues bien, nuestro protagonista no nació de sopetón, sino que fue poco a poco mejorando de ideas previas. Si empezó su trayectoria en el mundo de la agricultura, ha pasado por la guerra y por la ingeniería civil y la minería. Veamos, en dos pinceladas, cuál fue el oscuro nacimiento del bulldozer.
La historia del bulldozer, tal y como hoy la conocemos, surgió de mejoras sucesivas que tuvieron su comienzo con el invento del tractor sobre orugas. Su aparición exacta en el tiempo es un poco oscura, pero en 1713, Frenchman M. D’Hermand propuso un tractor de este tipo traccionado por cabras. Hubo que esperar a 1770 para que Richard Lovell Edgeworth patentara el sistema pero propulsado a vapor. Otros inventos posteriores que mejoraron el sistema fue el desarrollado en 1826 por George Calley, unas orugas a las que denominó “vía férrea universal” (continuous track system, en inglés). Otro invento, el denominado “carruaje con orugas movibles”, fue obra de Dimitri Sagryazhsky, pero no pasó de ser un dibujo sobre un papel. Otra patente fue la de James Boydell, que registró “una rueda de vía férrea sin fin”. En la Guerra de Crimea (1853-1856) ya se usaron los primeros tractores de este tipo propulsados a vapor.
En 1877, Fyodor Blinov creó un vehículo al que denominó “carromato movido sobre raíles sin fin”. Aunque era un vehículo arrastrado por caballos, al año siguiente patentó el mismo vehículo autopropulsado a vapor. Años más tarde, entre 1881 y 1888 desarrolló dicho vehículo.
Carromato de Blinov traccionado por caballos
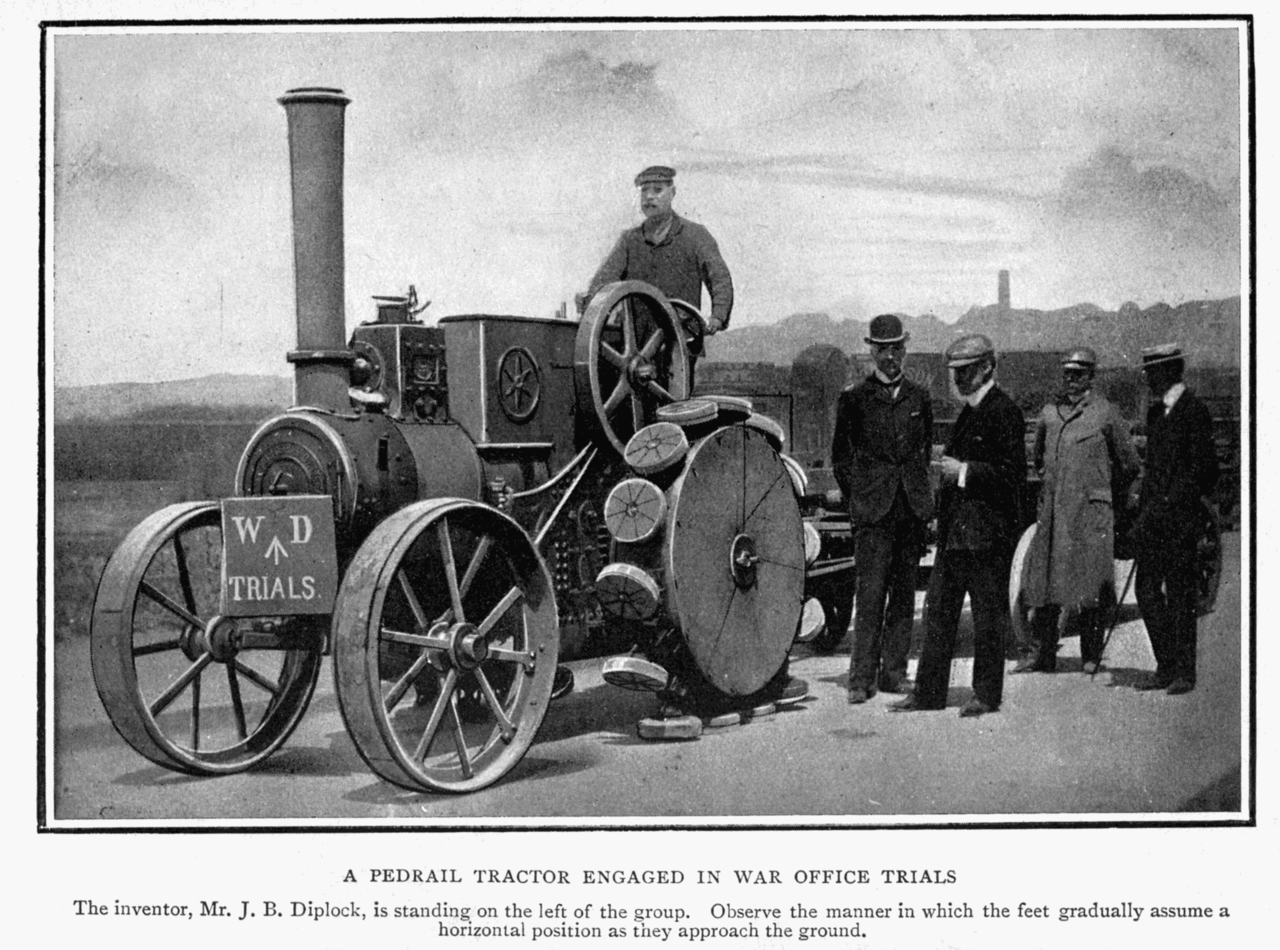
Otra patente es la de Bramah Joseph Diplock, que inventó en 1903 un sistema curioso de tracción sobre martillos “pedrail wheel”, capaz incluso de subir escaleras. Aunque esta tentativa se alejó del resultado final que conocemos hoy día.
Figura. «Pedrail wheel» de Diplock. http://www.wikiwand.com/en/Bramah_Joseph_Diplock
Sin embargo, hay que adentrarse en el siglo XX para que Alvin Orlando Lombard introdujera, en 1901, las orugas en vehículos para mejorar la tracción sobre la nieve. Era una especie de arrastrador de troncos accionado a vapor, con aspecto de locomotora. Posteriormente, estas máquinas acabaron accionándose mediante motores de combustión interna.
El término genérico “caterpillar” (tractor de oruga) fue utilizado por primera vez en 1909. En 1914 su silueta era poco diferente de los actuales. La provechosa unión del tractor de oruga y la cuchara requirió cierto tiempo.
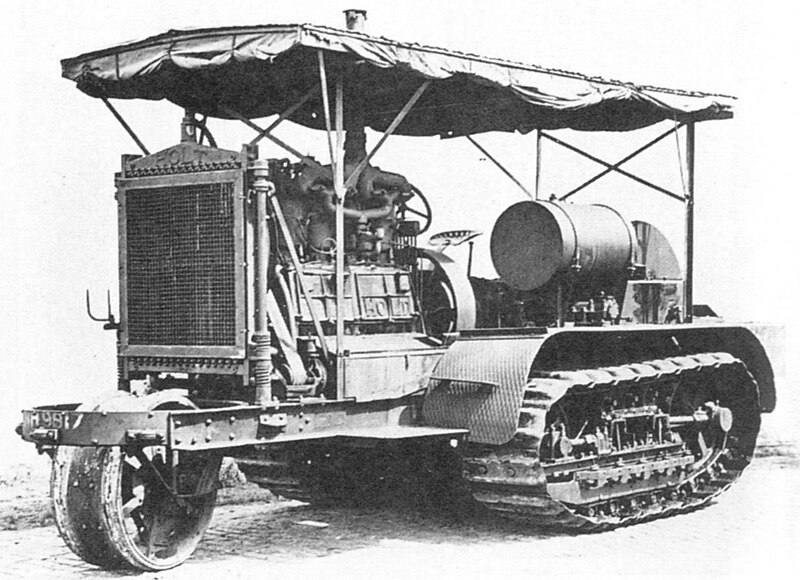
A pesar del éxito de Lombard, no fue hasta que el pionero de la construcción Benjamín Holt transformó este invento en la popular máquina de movimiento de tierras que hoy conocemos. Holt fue jefe de Holt Manufacturing Co. en Stockton, California. Empezó a experimentar con sus tractores sobre orugas en 1906 y tuvo sus problemas con Lombard, que pensaba que el tractor de Holt era una copia de sus ideas. Al otro lado del charco, en Inglaterra, David Roberts, ingeniero jefe de R. Hornsby & Sons, patentó un sistema propio de oruga en 1904. Sin embargo, las ventas no fueron tan exitosas como las de Holt, por lo que le vendió su patente a Holt en 1914.
Figura. Tractor de David Roberts a vapor, sobre 1908
Figura. Tractor Hornsby, 1909
Holt empezó a aplicar motores de gasolina a los tractores. En 1906 Holt y su sobrino Pliny empezaron a probar su primer motor, hasta que en 1908 vendieron el primer tractor sobre orugas, el llamado Modelo 40, accionado por un motor de combustión interna, con 25 caballos de potencia. Estos primeros tractores tuvieron un uso agrícola, pero al aplicarles una cuchilla al frente del tractor, nació el bulldozer, tal y como lo conocemos.
Figura. Tractor Holt 120, sobre 1914
El invento de poner una hoja empujadora ya tuvo sus primeras versiones en el siglo XIX, pero con propulsión animal. Además, estas palas debían accionarse manualmente. Su versatilidad en terrenos blandos para la explotación forestal y construcción de carreteras llevó directamente a que se conviertan en el tanque blindado en la Primera Guerra Mundial.
Figura. Tractor Holt en la batalla del Somme, 1917
Sin embargo, hacia 1920 fue cuando ya se montan las primeras hojas sobre tractores de cadenas. En 1925, año en que se fundó la empresa Caterpillar, se fabrica la primera hoja de empuje de mando hidráulico, sin buenos resultados, por lo que siguió utilizando un sistema de cabrestante, cables, etcétera. Es en el año 1929 cuando se empezó a fabricar el primer modelo de bulldozer, en donde el conductor iba sentado en la parte de arriba sin una cabina cerrada que lo protegiera. En 1931, se sienta lo que sería una de las grandes bases de crecimiento y utilización de estas máquinas en obra con la introducción del motor Diesel por las casas Caterpillar y Hanomag. La hoja de empuje con mando hidráulico, y aceptables en cuanto a funcionamiento y rendimiento, aparece en el mercado en 1935. Otro gran avance tecnológico fue la introducción del convertidor de par en 1940. En el año 1968, Komatsu introduce el sistema de control por radio para un bulldozer diseñado para trabajar en zonas peligrosas, así como un modelo anfibio para profundidades de hasta 7 m. En 1970 aparece con Komatsu un bulldozer totalmente submarino que trabaja hasta 60 m en el fondo del mar.
Versiones más primitivas del buldócer han sido completadas en el siglo XIX agregando palas a los caballos, pero el tractor sobre orugas podía incrementar su poder exponencialmente. Las primeras palas sujetadas a los tractores tenían que ser propulsadas moviéndolas manualmente con timones a mano. Experimentación con buldóceres mejoró al comienzo de los años 1920s, con el primer dócer operado hidráulicamente fabricado en 1925 por LaPlant-Choate Manufacturing Co. en Cedar Rapids, Iowa. Esta cuchilla era enganchada al tractor en un bastidor rectangular, pivotando en el marco del tractor sobre orugas, y controlado por un cilindro hidráulico en la parte posterior del tractor.
El movimiento de la cuchilla fue mejorado con el desarrollo del PCU (Unidad de Poder), introducido por Robert Gilmour Le Tourneau en 1928. La nueva unidad era controlada por el uso de embragues y frenos, y estaba disponible con cuatro cabrias. La unidad de poder también fue usado en un amplio rango de otros accesorios, incluyendo escrepas de jalón y escarificadores.
Mientras que inicialmente el desarrollo de la cuchilla fue realizado separado de los tractores, compañías individuales comenzaron a unirse con fabricantes de tractores, creando un producto más sólido y unificado. Baker se unió con Allis-Chambers, Bucyrus-Erie se unió con International, y Le Tourneau se unió con Caterpillar. En los años 1940s, fabricantes de tractores integraron el desarrollo de cuchillas en sus instalaciones. Diez años después, los tractores y las cuchillas ya no eran piezas individuales, más bien, eran producidas para crear un vehículo ya muy parecido al actual.
Figura. Bulldozer actual. Caterpillar D11N.
Referencias:
YEPES, V. (2009). Breve historia de la ingeniería civil y sus procedimientos.Universidad Politécnica de Valencia.
YEPES, V. (2014). Maquinaria de movimiento de tierras. Apuntes de la Universitat Politècnica de València, Ref. 204. Valencia, 158 pp.
Como ya va siendo habitual, me han invitado junto a otros profesores, a explicar a grupos de alumnos de bachillerato qué es la profesión de ingeniero de caminos y las ventajas de estudiar en la Universitat Politècnica de Valencia. Es una labor ilusionante, pues te permite reflexionar sobre la profesión y su futuro. Es posible que lo que expliquemos a nuestros alumnos se quede anticuado en cuanto pasen muy pocos años. Además, a veces es complicado ilusionar a jóvenes que ven en el sector de la construcción un sector caduco y sin futuro en nuestro país. Sin embargo, la fuerte vocación de la Escuela de Valencia hacia el exterior y la posibilidad de dobles titulaciones parece que es una vía atractiva para el futuro profesional. No olvidemos tampoco la acreditación ABET de la que disfruta el título.
Os dejo la presentación y un vídeo que pondremos en estas Jornadas de Puertas Abiertas 2015. Espero que os gusten.
Monumento de Stonehenge, en Salisbury (Inglaterra). 2200 a.C.
Los dólmenes fueron los primeros grandes monumentos europeos de piedra y datan de alrededor de 4500 a.C. Son restos de antiguas cámaras funerarias y consisten en una gran piedra horizontal que se sustenta sobre otras verticales. Destaca, por la dificultad en la construcción de aquellos años, el monumento de Stonehenge. Es un círculo de piedras que se encuentra en la llanura de Salisbury (Inglaterra), que se comenzó a construir hacia el 2200 a.C. El círculo exterior soportó en un principio un dintel arqueado que, a su vez, rodeaba a cinco trilitos (dolmen de dos piedras que sostienen a una tercera en posición horizontal) dispuestos en forma de U. Parte de las piedras se trajeron de más de 216 km de distancia, desde Gales. Los constructores debieron transportar las piedras sobre troncos, lo cual parece realmente increíble.
Stonehenge antes de su restauración. 1877.
La construcción de un dolmen suponía un considerable esfuerzo de carácter colectivo, dado el nivel tecnológico del que disponían las comunidades neolíticas y también su estructura social. Las operaciones que había que desarrollar conllevaban un trabajo largo y pesado, en el que debía intervenir una considerable mano de obra bien estructurada, porque el esfuerzo físico a realizar era importante y su buena organización y planificación algo fundamental. Los pasos básicos consistían en cortar la piedra en los afloramientos que servían de cantera, tallar los bloques extraídos para ajustar la forma y medidas deseadas, transportar las piedras hasta el lugar elegido y por fin colocarlas tras haber preparado el terreno para ello. En diversas partes se han hecho ensayos sobre cómo se construía un dolmen y también numerosos cálculos del número de horas de trabajo y mano de obra precisa para trasladar los bloques y colocarlos. Cualquier estimación general es difícil, ya que cada caso es distinto en función de la distancia de la cantera, número de bloques, peso y medida de estos y características del lugar en que se ubica el sepulcro megalítico. En cualquier caso, como mínimo serían necesarios de 20 a 200 hombres trabajando a la vez para que las operaciones fueran rentables. Normalmente, para obtener la piedra se aprovechaban las grietas ya existentes en los afloramientos, donde a base de cuñas de madera seca, odres de cuero o piel llenas de agua, a veces mechas de cuero, hachas de piedra y percutores, se ensanchaban las fisuras para marcar las superficies de fragmentación. Luego la alternancia de fuego y agua, los cambios térmicos, la acción de cuñas, etc. producía el resquebrajamiento de la piedra, hecho este que según las condiciones podía ocurrir en pocos días e incluso en pocas horas, según las condiciones ambientales, geológicas y tecnológicas. Una vez que los bloques habían saltado, eran tallados con utensilios de piedra hasta obtener la forma y el tamaño adecuados. El traslado podía hacerse con trineos, pero parece que fue más habitual la tracción humana ayudada por el deslizamiento sobre rodillos de troncos de árboles y sogas atadas a la piedra para el tiro. En ocasiones se acondicionaban las irregularidades del terreno para facilitar el transporte. La colocación de las losas exigía de fosas de cimentación previamente efectuadas, donde con cuñas y palancas de madera se imbuían las piedras y enseguida se entinaban para sujetarlas. Luego estas fosas se llenaban con piedras pequeñas y tierra, mientras los ortostatos se calzaban con piedras medianas, cubriendo luego todo con tierra. En ciertos dólmenes, el primer ortostato en colocarse era el de la cabecera, que se situaba frente a la entrada de la cámara. Suele ser el de mayores dimensiones. Luego se colocaban los de los lados apoyados unos en otros hacia el interior, de tal manera que el central recogía parte de la carga de todos los demás. Muy a menudo por el exterior se colocaban piedras de refuerzo. Los corredores, que en la zona son estrechos y más bajos que la cámara, constituían el paso siguiente, con sus ortostatos también fijados en fosas de cimentación y calzados con piedras pequeñas. Los túmulos se levantaban, en último lugar, con una estructura interna que suele tener cierto grado de complejidad, con refuerzos y anillos de piedra que contenían las piedras sueltas y apelmazan las mismas. Por el túmulo se accedía a la colocación de la piedra horizontal que servía de cubrición a la cámara. En Europa se conocen más de 50.000 sepulcros megalíticos de distinta tipología, que cubren cerca de 2.000 años. Pero este número de sepulcros, por alto que pueda parecernos en principio, pone de manifiesto que si se utilizaron a lo largo de unas 80-100 generaciones, solo unos pocos individuos se enterraron en ellos, a pesar de su carácter colectivo, de su monumentalidad y del considerable esfuerzo y número de personas que intervinieron en su construcción.
Podéis ver unos vídeos sobre los secretos de Stonehenge aquí mismo:
Dentro del ámbito del aeropuerto de Madrid se encuentra el proyecto de oleoducto Torrejón-Barajas. La obra, realizada por Acciona, consiste en la construcción del tramo 2 del oleoducto que abastece a la red de hidrantes del aeropuerto desde las instalaciones de almacenamiento que CLH dispone en Torrejón de Ardoz. La conducción, de unos 5 km de longitud, consta de dos tuberías de acero de 24 pulgadas de diámetro, dispuestas en diversas tipologías constructivas, según los condicionantes de paso. Esta obra permite desmantelar los 13 tanques de queroseno del aeropuerto de Barajas, que almacenan más de 70 millones de litros de queroseno.
http://radiotubo.blogspot.com.es/
A continuación os dejo un vídeo realizado por voxelstudios los procesos constructivos empleados para la construcción del segundo tramo del Oleoducto Torrejón-Barajas diferenciando las tres tipologías constructivas empleadas según los condicionantes de paso, zanja a cielo abierto, hinca horizontal y perforación horizontal dirigida.
El sector de la construcción ha adoptado, de forma muy importante, sistemas de gestión de la calidad tipo ISO 9000. Este tipo de sistemas de gestión choca en ocasiones con la realidad de la obra. Cada proyecto es un prototipo único y presenta unos problemas específicos que hace difícil la adopción de un sistema de gestión de la calidad único para toda la empresa. Son por ello necesarios planes de calidad específicos para cada uno de los casos.
Consciente de estos problemas, ya en el año 1997, la Comisión de las Comunidades Europeas presentó al Parlamento europeo un documento donde se recogían las recomendaciones para reforzar la competitividad del sector. Dentro de este documento la calidad en la construcción era un punto básico. A continuación se recogen algunos de los resultados de un estudio adjudicado a la empresa consultora WS Atkins y a la Universidad de Navarra respecto al análisis de los sistemas de gestión de la calidad en nueve empresas del sector de la construcción europeas de nueve países distintos.
Respecto de la implantación:
Implantar un sistema de gestión basado en los principios de la Calidad Total
Desarrollar conjuntamente sistemas de calidad tanto en la empresa como en la obra
Cambiar la cultura de la empresa si fuera necesario, y enfatizar la necesidad de adoptar un sistema de calidad
Mantener el interés y la motivación del personal en temas de calidad una vez obtenida la certificación
Conseguir el equilibrio justo entre el coste que implican los sistemas de calidad y el valor añadido que proporcionan
Redactar manuales de calidad sencillos y fáciles de manejar, para hacerlos más comprensibles
Respecto de la Dirección:
Fomentar el estilo de liderazgo preciso y establecer canales de comunicación efectivos
Delegar responsabilidades en los equipos de obra y en los niveles inferiores de la organización
Respecto del seguimiento del sistema:
Sistematizar la recogida de datos sobre la eficacia de los distintos procesos de negocio, especialmente los de determinación del costo de la no calidad y de la satisfacción del cliente
Aprender del seguimiento y evolución de los sistemas de calidad que realizan empresas de la industria mediante prácticas de benchmarking
Emplear indicadores específicos de rendimiento, tipo «scorecard» (cuadro de mando), para comprobar la adecuación de las tendencias a los objetivos concretos
Respecto de la gestión de obra:
Formación del personal de obra y gratificación de los logros conseguidos
Pronta detección de defectos mediante visitas continuas a obra para prevenir fallos
Creación de canales de comunicación formales y eficaces, evitando el abuso de los canales informales
Fomentar la confianza mutua y el intercambio de sugerencias y propuestas entre todos los participantes en el proceso constructivo
Referencias:
European Communities (2001). El camino europeo hacia la excelencia en la construcción. Editoriales Dossat 2000, Madrid. ISBN: 84-95312-50-6.
PELLICER, E.; YEPES, V.; TEIXEIRA, J.C.; MOURA, H.P.; CATALÁ, J. (2014). Construction Management. Wiley Blackwell, 316 pp. ISBN: 978-1-118-53957-6.
 El aglomerado asfáltico está sometido a un proceso de envejecimiento y descomposición, ya sea por exposición constante del agua, cargas extremadamente pesadas o desgaste de la base. Los baches constituyen una molestia si se dejan sin reparar, presentan un peligro elevado en la seguridad vial y presentan altos costes de mantenimiento.
El aglomerado asfáltico está sometido a un proceso de envejecimiento y descomposición, ya sea por exposición constante del agua, cargas extremadamente pesadas o desgaste de la base. Los baches constituyen una molestia si se dejan sin reparar, presentan un peligro elevado en la seguridad vial y presentan altos costes de mantenimiento. Una forma innovadora de reparar los baches sin impactar negativamente en la circulación de los vehículos es la solución que presenta la empresa Amey. Se trata de unos camiones con un brazo robótico extensible que, en cuestión de pocos minutos, permite la reparación de estos desperfectos en el pavimento.
Una forma innovadora de reparar los baches sin impactar negativamente en la circulación de los vehículos es la solución que presenta la empresa Amey. Se trata de unos camiones con un brazo robótico extensible que, en cuestión de pocos minutos, permite la reparación de estos desperfectos en el pavimento.