Figura 1. Buldócer Cat D9T. https://commons.wikimedia.org/wiki/File:CatD9T.jpg
Uno de los ejemplos usuales es la producción de un buldócer (bulldozer, en inglés), que primero debe escarificar un terreno y luego debe empujarlo hasta una distancia de transporte determinada. En una entrada anterior dimos la resolución de la producción combinada de un buldócer.
Ahora os presentamos un nomograma elaborado junto con el profesor Pedro Martínez-Pagán sobre la producción del ripado y el transporte con dicha máquina. Se han seguido las recomendaciones empíricas recogidas en el “Manual de arranque, carga y transporte en minería de cielo abierto” (Gómez de las Heras et al., 1995).
GÓMEZ DE LAS HERAS, J.; MANGLANO, S.; TOLEDO, J.; LÓPEZ-JIMENO, C.; LÓPEZ-JIMENO, E. (1995). Manual de arranque, carga y transporte en minería a cielo abierto. Instituto Geológico y Minero de España, Madrid, 604 pp.
YEPES, V. (1995). Maquinaria de movimiento de tierras. Servicio de Publicaciones de la Universidad Politécnica de Valencia. SP.UPV-264. 144 pp.
Es habitual encontrarnos con equipos que, aunque trabajen de forma aislada, deban realizar varios tipos de trabajo consecutivos para completar una tarea. Además, la producción de cada uno de estos trabajos es diferente. El problema radica en calcular la producción conjunta. Uno de los ejemplos usuales es la producción de un buldócer (bulldozer, en inglés), que primero debe escarificar un terreno y luego debe empujarlo hasta una distancia de transporte determinada.
Una mototraílla convencional, empujada por un buldócer, tiene una curva de llenado, función del tiempo de carga “t”: C=C(t). Sabiendo que el ciclo completo de las mototraíllas vale (a+t) y el de las empujadoras (b+d·t), siendo a, b y d constantes, calcular el tiempo de carga óptimo.
Resolución:
Como el material encuentra cada vez mayor resistencia a entrar en la caja de la traílla conforme esta se va llenando, la curva de carga es creciente, con un valor asintótico superior, que es la mayor capacidad de la traílla, a partir de la cual la misma cantidad de material que entra por abajo es derramado por su parte superior.
La curva C=C(t) tendría una forma como la que sigue:
El tiempo de carga óptimo es el que minimiza el coste unitario de producción U(t):
El coste horario del equipo, si este está formado por “n” traíllas, a un costo horario de “T” ptas/h, y “m” topadoras, a un coste horario de “E” euros/h, será:
Coste horario del equipo=n·T+m·E euros/h
La productividad horaria del equipo va a depender de si faltan o sobran traíllas.
* Si faltan traíllas, serán estas las que condicionen la producción total del equipo, que será:
En este caso
para encontrar el mínimo, derivamos e igualamos a cero:
Por consiguiente, para el cálculo del tiempo de carga óptimo basta con buscar la tangente de la curva de carga desde un punto situado a una distancia “a” del origen. “a” es el período del ciclo de la mototraílla que no se emplea en la carga.
* Si sobran traíllas, las topadoras condicionarán la producción total del equipo, que será:
En este caso
para encontrar el mínimo, derivamos e igualamos a cero:
Por tanto, de forma análoga al caso anterior, para el cálculo del tiempo de carga óptimo basta con buscar la tangente de la curva de carga desde un punto situado a una distancia “b/d” del origen.
La «ripabilidad» de una roca representa una medida del grado de dificultad de la misma para ser excavada con equipos de convencionales; mediante la rotura del terreno con un tractor o buldócer que permite su excavación o carga directa. Si bien hay numerosos factores que afectan la ripabilidad, como por ejemplo la resistencia fracturación, dirección del buzamiento de la roca, etc., en términos de producción, los factores dominantes son: la resistencia a la compresión simple de la roca, el grado de meteorización, la velocidad sísmica, la resistencia y rugosidad de las juntas, su separación, y sobre todo la masa del tractor. Las empresas constructoras de maquinaria suelen ofrecer gráficos como el que os dejo aquí abajo, donde se establecen los valores (en función de la velocidad sísmica) para los cuales un terreno es ripable.
Ripabilidad (D9) vs. Velocidad de Onda Sísmica (Caterpillar, Handbook of Ripping 8th Edition)
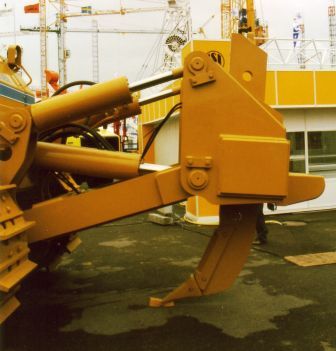
Ahora hablaremos del escarificador. Es un equipo que un tractor oruga pesado lleva en su parte posterior un bastidor, accionado hidráulicamente, provisto de uno o varios dientes rompedores. Con el avance del tractor y accionado mediante cilindros hidraúlicos, el diente escarificador o «ripper», provisto en su extremo de una uña dirigida hacia abajo, penetra y desgarra el terreno cuando éste es excesivamente duro o cohesivo para ser removido con la hoja frontal. Actualmente los tractores más utilizados en los trabajos de escarificación son los de peso igual o superior a las 35 t. y potencia igual o superior a los 300 CV. La pregunta es: ¿qué podemos hacer para conseguir una mayor producción, un menor coste y una mayor seguridad al trabajar ripando? A continuación os dejo un Polimedia y varios vídeos para recordar los conceptos básicos sobre el tema. Espero que os gusten.
Referencias:
YEPES, V. (1997). Equipos de movimiento de tierras y compactación. Problemas resueltos. Colección Libro Docente nº 97.439. Ed. Universitat Politècnica de València. 253 pág. Depósito Legal: V-4598-1997. ISBN: 84-7721-551-0.
YEPES, V. (2014). Maquinaria de movimiento de tierras. Apuntes de la Universitat Politècnica de València, Ref. 204. Valencia, 158 pp.
El paradigma de la máquina empleada en ingeniería civil es la topadora, explanadora, buldócer, o como lo conocemos habitualmente en inglés, el bulldozer. Aunque se trata de un tractor sobre cadenas, también podemos encontrarlo sobre neumáticos (turnadozer), aunque es más raro. Pues bien, nuestro protagonista no nació de sopetón, sino que fue poco a poco mejorando de ideas previas. Si empezó su trayectoria en el mundo de la agricultura, ha pasado por la guerra y por la ingeniería civil y la minería. Veamos, en dos pinceladas, cuál fue el oscuro nacimiento del bulldozer.
La historia del bulldozer, tal y como hoy la conocemos, surgió de mejoras sucesivas que tuvieron su comienzo con el invento del tractor sobre orugas. Su aparición exacta en el tiempo es un poco oscura, pero en 1713, Frenchman M. D’Hermand propuso un tractor de este tipo traccionado por cabras. Hubo que esperar a 1770 para que Richard Lovell Edgeworth patentara el sistema pero propulsado a vapor. Otros inventos posteriores que mejoraron el sistema fue el desarrollado en 1826 por George Calley, unas orugas a las que denominó “vía férrea universal” (continuous track system, en inglés). Otro invento, el denominado “carruaje con orugas movibles”, fue obra de Dimitri Sagryazhsky, pero no pasó de ser un dibujo sobre un papel. Otra patente fue la de James Boydell, que registró “una rueda de vía férrea sin fin”. En la Guerra de Crimea (1853-1856) ya se usaron los primeros tractores de este tipo propulsados a vapor.
En 1877, Fyodor Blinov creó un vehículo al que denominó “carromato movido sobre raíles sin fin”. Aunque era un vehículo arrastrado por caballos, al año siguiente patentó el mismo vehículo autopropulsado a vapor. Años más tarde, entre 1881 y 1888 desarrolló dicho vehículo.
Carromato de Blinov traccionado por caballos
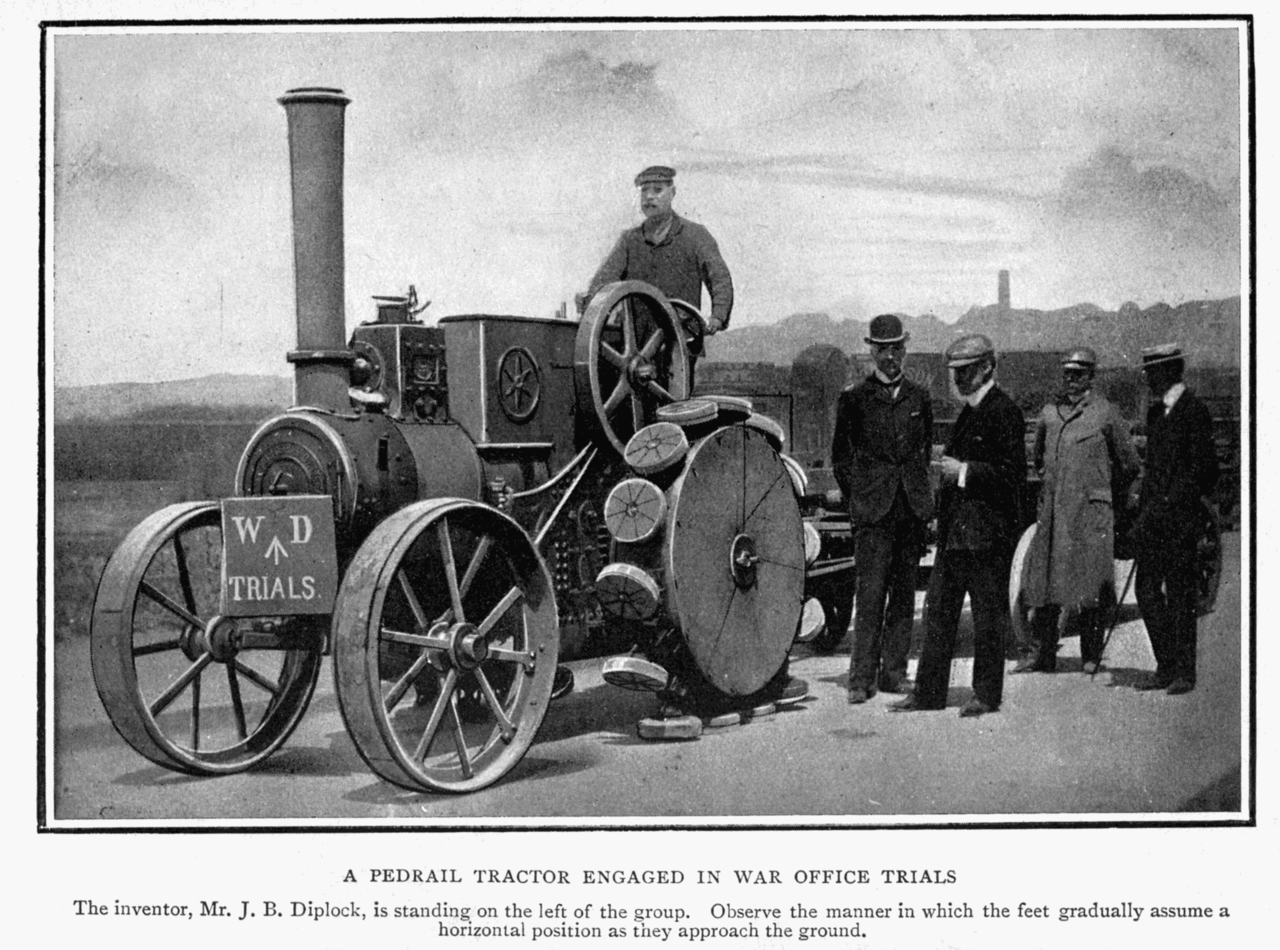
Otra patente es la de Bramah Joseph Diplock, que inventó en 1903 un sistema curioso de tracción sobre martillos “pedrail wheel”, capaz incluso de subir escaleras. Aunque esta tentativa se alejó del resultado final que conocemos hoy día.
Figura. «Pedrail wheel» de Diplock. http://www.wikiwand.com/en/Bramah_Joseph_Diplock
Sin embargo, hay que adentrarse en el siglo XX para que Alvin Orlando Lombard introdujera, en 1901, las orugas en vehículos para mejorar la tracción sobre la nieve. Era una especie de arrastrador de troncos accionado a vapor, con aspecto de locomotora. Posteriormente, estas máquinas acabaron accionándose mediante motores de combustión interna.
El término genérico “caterpillar” (tractor de oruga) fue utilizado por primera vez en 1909. En 1914 su silueta era poco diferente de los actuales. La provechosa unión del tractor de oruga y la cuchara requirió cierto tiempo.
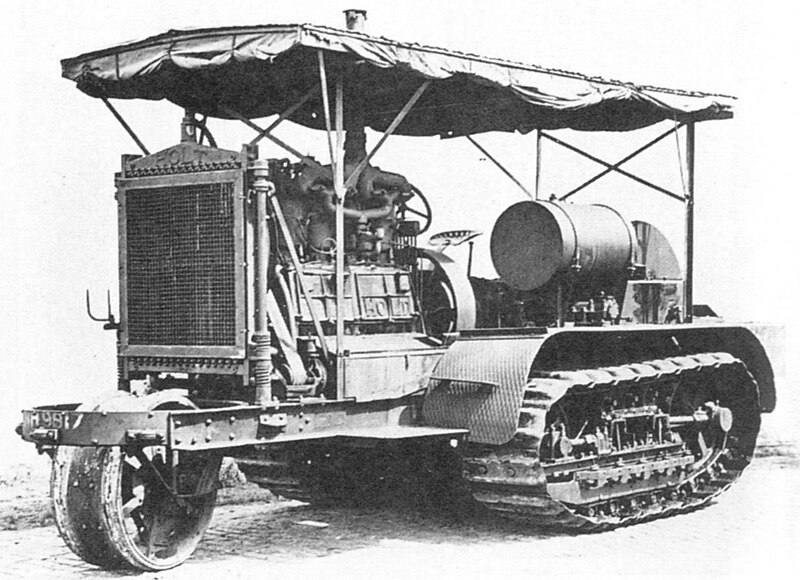
A pesar del éxito de Lombard, no fue hasta que el pionero de la construcción Benjamín Holt transformó este invento en la popular máquina de movimiento de tierras que hoy conocemos. Holt fue jefe de Holt Manufacturing Co. en Stockton, California. Empezó a experimentar con sus tractores sobre orugas en 1906 y tuvo sus problemas con Lombard, que pensaba que el tractor de Holt era una copia de sus ideas. Al otro lado del charco, en Inglaterra, David Roberts, ingeniero jefe de R. Hornsby & Sons, patentó un sistema propio de oruga en 1904. Sin embargo, las ventas no fueron tan exitosas como las de Holt, por lo que le vendió su patente a Holt en 1914.
Figura. Tractor de David Roberts a vapor, sobre 1908
Figura. Tractor Hornsby, 1909
Holt empezó a aplicar motores de gasolina a los tractores. En 1906 Holt y su sobrino Pliny empezaron a probar su primer motor, hasta que en 1908 vendieron el primer tractor sobre orugas, el llamado Modelo 40, accionado por un motor de combustión interna, con 25 caballos de potencia. Estos primeros tractores tuvieron un uso agrícola, pero al aplicarles una cuchilla al frente del tractor, nació el bulldozer, tal y como lo conocemos.
Figura. Tractor Holt 120, sobre 1914
El invento de poner una hoja empujadora ya tuvo sus primeras versiones en el siglo XIX, pero con propulsión animal. Además, estas palas debían accionarse manualmente. Su versatilidad en terrenos blandos para la explotación forestal y construcción de carreteras llevó directamente a que se conviertan en el tanque blindado en la Primera Guerra Mundial.
Figura. Tractor Holt en la batalla del Somme, 1917
Sin embargo, hacia 1920 fue cuando ya se montan las primeras hojas sobre tractores de cadenas. En 1925, año en que se fundó la empresa Caterpillar, se fabrica la primera hoja de empuje de mando hidráulico, sin buenos resultados, por lo que siguió utilizando un sistema de cabrestante, cables, etcétera. Es en el año 1929 cuando se empezó a fabricar el primer modelo de bulldozer, en donde el conductor iba sentado en la parte de arriba sin una cabina cerrada que lo protegiera. En 1931, se sienta lo que sería una de las grandes bases de crecimiento y utilización de estas máquinas en obra con la introducción del motor Diesel por las casas Caterpillar y Hanomag. La hoja de empuje con mando hidráulico, y aceptables en cuanto a funcionamiento y rendimiento, aparece en el mercado en 1935. Otro gran avance tecnológico fue la introducción del convertidor de par en 1940. En el año 1968, Komatsu introduce el sistema de control por radio para un bulldozer diseñado para trabajar en zonas peligrosas, así como un modelo anfibio para profundidades de hasta 7 m. En 1970 aparece con Komatsu un bulldozer totalmente submarino que trabaja hasta 60 m en el fondo del mar.
Versiones más primitivas del buldócer han sido completadas en el siglo XIX agregando palas a los caballos, pero el tractor sobre orugas podía incrementar su poder exponencialmente. Las primeras palas sujetadas a los tractores tenían que ser propulsadas moviéndolas manualmente con timones a mano. Experimentación con buldóceres mejoró al comienzo de los años 1920s, con el primer dócer operado hidráulicamente fabricado en 1925 por LaPlant-Choate Manufacturing Co. en Cedar Rapids, Iowa. Esta cuchilla era enganchada al tractor en un bastidor rectangular, pivotando en el marco del tractor sobre orugas, y controlado por un cilindro hidráulico en la parte posterior del tractor.
El movimiento de la cuchilla fue mejorado con el desarrollo del PCU (Unidad de Poder), introducido por Robert Gilmour Le Tourneau en 1928. La nueva unidad era controlada por el uso de embragues y frenos, y estaba disponible con cuatro cabrias. La unidad de poder también fue usado en un amplio rango de otros accesorios, incluyendo escrepas de jalón y escarificadores.
Mientras que inicialmente el desarrollo de la cuchilla fue realizado separado de los tractores, compañías individuales comenzaron a unirse con fabricantes de tractores, creando un producto más sólido y unificado. Baker se unió con Allis-Chambers, Bucyrus-Erie se unió con International, y Le Tourneau se unió con Caterpillar. En los años 1940s, fabricantes de tractores integraron el desarrollo de cuchillas en sus instalaciones. Diez años después, los tractores y las cuchillas ya no eran piezas individuales, más bien, eran producidas para crear un vehículo ya muy parecido al actual.
Figura. Bulldozer actual. Caterpillar D11N.
Referencias:
YEPES, V. (2009). Breve historia de la ingeniería civil y sus procedimientos.Universidad Politécnica de Valencia.
YEPES, V. (2014). Maquinaria de movimiento de tierras. Apuntes de la Universitat Politècnica de València, Ref. 204. Valencia, 158 pp.