Acabamos de recibir la agradable noticia de que nuestra compañera Cristina Torres Machí ha sido elegida como ganadora de la categoría Tesis Doctoral del Premio Abertis Chile, patrocinada por la Cátedra Abertis de la Pontificia Universidad Católica de Chile. La tesis, denominada «Optimización heurística multiobjetivo para la gestión de activos de infraestructura de transporte terrestre» se defendió el 30 de marzo de 2015, optando brillantemente a la doble titulación de doctorado, tanto de la Universitat Politècnica de València (UPV) como de la Pontificia Universidad Católica de Chile (PUC). Los directores de tesis han sido la doctora Marcela Alondra Chamorro Gine (PUC), Eugenio Pellicer Armiñana (UPV) y Víctor Yepes Piqueras (UPV). La calificación fue la máxima posible, de sobresaliente “cum laude” por unanimidad.
TORRES-MACHÍ, C.; CHAMORRO, A.; YEPES, V.; PELLICER, E. (2014). Current models and practices of economic and environmental evaluation for sustainable network-level pavement management.Revista de la Construcción, 13(2): 49-56. http://dx.doi.org/10.4067/S0718-915X2014000200006
TORRES-MACHÍ, C.; CHAMORRO, A.; VIDELA, C.; PELLICER, E.; YEPES, V. (2014). An iterative approach for the optimization of pavement maintenance management at the network level.The Scientific World Journal, Volume 2014, Article ID 524329, 11 pages, http://dx.doi.org/10.1155/2014/524329 (link)
TORRES-MACHÍ, C.; CHAMORRO, A.; PELLICER, E.; YEPES, V.; VIDELA, C. (2015). Sustainable pavement management: Integrating economic, technical, and environmental aspects in decision making.Transportation Research Record, 2523:56-63. DOI:10.3141/2523-07
YEPES, V.; TORRES-MACHÍ, C.; CHAMORRO, A.; PELLICER, E. (2016). Optimal pavement maintenance programs based on a hybrid greedy randomized adaptive search procedure algorithm.Journal of Civil Engineering and Management, 22(4):540-550. DOI: 10.3846/13923730.2015.1120770
YEPES, V.; MEDINA, J.R. (2006). Big-Bang: Un nuevo algoritmo aplicado a la optimización de redes de transporte del tipo VRPTW.Actas del VII Congreso de Ingeniería del Transporte CIT-2006. Libro CD, 8 pp. Ciudad Real, 14-16 de junio. ISBN: 84-689-8341-1.
RESUMEN
La ponencia presenta un procedimiento de optimización económica de rutas de reparto con flotas de vehículos heterogéneas y horarios de servicio flexibles VRPHESTW. Para ello se presenta una nueva heurística, denominada “Big-Bang” basada en la modificación gradual de la variable espacial donde se ubican los nodos que representan a los clientes. La simulación de esta heurística de relajación consiste en reducir la velocidad de todos los vehículos, que al principio es muy alta para estabilizarse al final en su verdadera magnitud. El algoritmo emplea para explorar el espacio de soluciones una búsqueda probabilista en entornos variables con una aceptación de máximo gradiente. El algoritmo propuesto encuentra soluciones de elevada calidad, con la ventaja de poder utilizar otros procedimientos de búsqueda local que resulten más eficientes que el de máximo gradiente (algoritmo del solterón, aceptación por umbrales, búsqueda tabú, etc.).
INTRODUCCIÓN
La asignación de rutas de reparto a una flota de vehículos “Vehicle Routing Problem” (VRP) constituye un problema habitual en las empresas dedicadas a la distribución de bienes o personas que conlleva un impacto económico, social y medioambiental importante. Sin embargo, los problemas de optimización que representan numerosas situaciones reales sólo pueden resolverse mediante procedimientos aproximados debido a su elevada complejidad intrínseca (ver Ball et al., 1995).
En las últimas décadas se han aplicado una gran variedad de técnicas para optimizar el problema de las rutas con horarios de servicio “vehicle routing problem with time windows” (VRPTW), tanto con heurísticas de construcción de soluciones (ver Solomon, 1987) o de mejora (ver Potvin y Rousseau, 1995), como metaheurísticas (ver Homberger y Gehring, 2005; Russell y Chiang, 2006). Sin embargo, son escasas las publicaciones que abordan la optimización con modelos más cercanos a la realidad incorporando horarios de servicio flexibles “vehicle routing problem with soft time windows” (VRPSTW) (ver Taillard et al., 1997), flotas heterogéneas de vehículos “vehicle routing problem with a heterogeneous fleet of vehicles” (VRPHE) (ver Gendreau et al., 1999), o ambas “vehicle routing problem with a heterogeneous fleet of vehicles and soft time windows” (VRPHESTW) (ver Yepes y Medina, 2002, 2004, 2006).
Además, los problemas reales de rutas difieren significativamente de los problemas teóricos. En efecto, la optimización jerárquica empleada habitualmente en la literatura (donde las mejores soluciones son las que, en primer lugar, presentan un menor número de rutas; y posteriormente, una menor distancia recorrida por todos los vehículos), no representa adecuadamente los costes reales de las empresas ni sus políticas de tarifas. Yepes (2002) indicó la trascendencia de utilizar una función objetivo de tipo económico para resolver estos problemas ante cambios en los escenarios de tarifas y costes. Asimismo, las restricciones legales y sociales, así como la calidad del servicio también se deben incluir dentro de una función objetivo de tipo económico, que contemple los ingresos y los costes de las operaciones de transporte (Medina y Yepes, 2003).
En la ponencia se presenta una nueva heurística basada en la modificación gradual de la variable espacial donde se ubican los nodos que representan a los clientes, y que se ha denominado “Big-Bang”. Esta estrategia de relajación, a su vez, se anida en una variante de la búsqueda en entornos variables “Variable Neighborhood Search” (VNS) (ver Mladenovic y Hansen, 1997) apoyada en la elección probabilista de un operador distinto en cada movimiento, empleada con éxito en el trabajo de Yepes y Medina (2006). Todo ello se ensaya con un problema de rutas del tipo VRPHESTW donde, además, se emplea una función objetivo de tipo económico, unas jornadas laborables con distintos costes y con tiempos de viaje dependientes del tiempo de acceso y alejamiento a cada nodo (congestión, tráfico, etc.).
EL ALGORITMO BIG-BANG
El algoritmo Big-Bang que se propone parte de la siguiente idea: Si todos los vehículos tuviesen una velocidad mayor a la real, dicho fenómeno se podría interpretar como que los clientes se encuentran en un espacio donde, físicamente, las distancias fuesen menores. Un procedimiento de búsqueda encontraría un óptimo local en este escenario favorable a la reducción del número de vehículos. Si se desciende escalonadamente la velocidad, y en cada caso se encuentra su óptimo local, probablemente el nuevo óptimo sería similar al anterior, siempre que la disminución fuera suficientemente suave. Esta relajación de la velocidad se interrumpiría en el último escalón, donde el óptimo local encontrado satisfaría la velocidad real de los vehículos. El efecto sería un aumento gradual del espacio físico donde se ubican los clientes, efecto por el cual se ha querido llamar a la heurística algoritmo Big-Bang. En la situación inicial las restricciones fundamentales que condicionan el problema son la capacidad de los vehículos y los horarios de servicio. Al final, la lejanía entre los clientes y el almacén central, son condiciones que se han introducido progresivamente al final de la heurística.
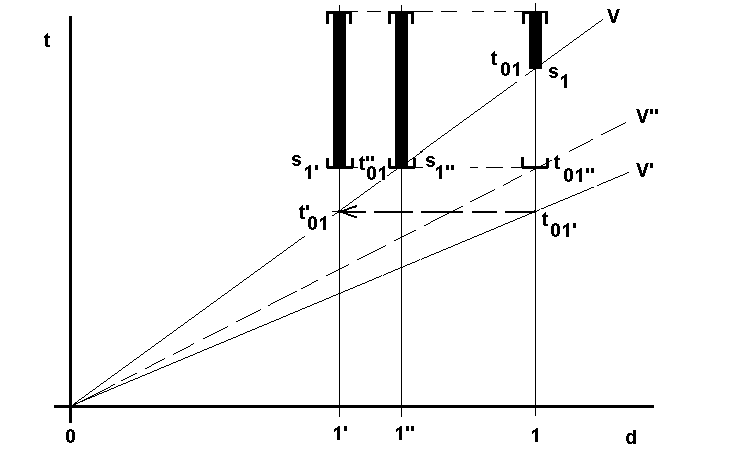
En efecto, un vehículo con una velocidad v llega de 0 a 1 en el instante t01 (ver Figura 1). Se supone, sin perder generalidad, que el tiempo de servicio es nulo. Si la velocidad se incrementase a v’, entonces la llegada ocurriría en t01’. Esta situación equivale a suponer que el nodo, en vez de estar en 1 está más cerca de 0, es decir, en 1’ y la velocidad se mantiene en v. Así, la llegada ocurre en el instante t’01, que es igual al t01’. Por tanto, un aumento en la rapidez de los vehículos es equivalente a un acortamiento físico de las distancias. Sin embargo, las ventanas temporales interfieren en el razonamiento anterior. La existencia de esperas provoca que, aunque la velocidad v’ favorece el acortamiento a la distancia 1’, no es posible iniciar el servicio puesto que lo impide la ventana temporal. La situación equivalente es la representada en la Figura 1 cuando el vehículo circula a una velocidad v’’. En este caso, el acortamiento de distancias a 1’ se ve interrumpido por la limitación en el inicio del servicio a la situación 1’’, donde el inicio del servicio s1’ es coincidente con el s1’’. La conclusión es que el aumento de la rapidez de los vehículos permite relajar las restricciones en las distancias, acortando éstas mientras las limitaciones horarias no lo impidan.
Fig. 1 – Incidencia en la variación de la velocidad de un vehículo en el inicio del servicio
Una de las características más interesantes de esta heurística de relajación consiste en la posibilidad de emplear como procedimientos de búsqueda local en cada escalón de velocidad, metaheurísticas más agresivas de búsqueda que la simple aceptación por umbrales (búsqueda tabú, algoritmo del solterón, cristalización simulada, etc.). En la ponencia que se presenta se ha optado por utilizar una búsqueda de máximo gradiente para comprobar la eficacia intrínseca del algoritmo, para no empañarla con la de otras metaheurísticas que por sí solas resultan, muy eficaces para el problema VRPHESTW (ver Yepes y Medina, 2004).
DESCRIPCIÓN DE LA METAHEURÍSTICA PROPUESTA
El método presentado consta de dos fases. En la primera se genera una solución inicial mediante una heurística de construcción de rutas específica. Posteriormente se emplea el algoritmo “Big-Bang” basándose en una versión probabilista de la búsqueda por entornos variables “Variable Neighborhood Search” (VNS) (ver Mladenovic y Hansen, 1997) y un criterio de aceptación de máximo gradiente.
3.1 Fase 1: Heurística económica de construcción secuencial de rutas.
Se ha empleado el método de Yepes y Medina (2006) para generar una solución inicial de elevada calidad al problema VRPHESTW. El procedimiento inicia una ruta seleccionando adecuadamente al primer cliente para posteriormente agregar otros mientras se cumplan las restricciones impuestas. Además, se elige el vehículo de mayor capacidad para disminuir en lo posible el número necesario.
3.2 Fase 2: Algoritmo “Big-Bang” con búsqueda probabilista en entornos variables.
El algoritmo que se propone consta de un número M+1 de ciclos de búsqueda local por entornos. Cada ciclo de búsqueda termina con la obtención de un óptimo relativo correspondiente con unas velocidades de los vehículos fijadas para dicho ciclo. En el primer ciclo, la velocidad de los vehículos se amplifica por un factor de incremento D= D1>1. Este factor debe reducirse progresivamente hasta llegar al último ciclo de búsqueda local, en el cual D =DM+1 =1. Para este trabajo, la reducción de la velocidad ha sido lineal con el número de ciclos; sin embargo, se podría adoptar otro tipo de función reductora.
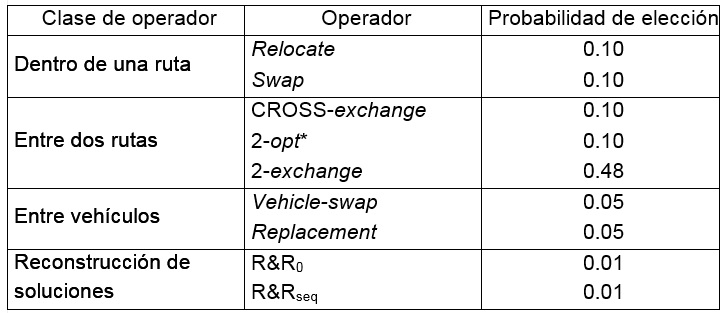
Como técnica de búsqueda local se ha empleado la metaheurística propuesta por Yepes y Medina (2006) para el problema VRPHESTW, de búsqueda por entornos variables basada en la elección probabilística de 9 operadores distintos y un criterio de aceptación por máximo gradiente. Los movimientos elegidos han sido los siguientes:
Movimientos dentro de una ruta: se emplea el operador relocate (un nodo salta a otro lugar dentro de la ruta) y el swap (dos nodos de la ruta se intercambian entre sí).
Movimientos entre dos rutas: se utiliza el operador CROSS-exchange (Taillard et al., 1997) y dos casos particulares, el movimiento 2-opt* (Potvin y Rousseau, 1995) y el 2-exchange (Osman, 1993).
Movimiento de vehículos: vehicle–swap cambia entre sí los vehículos de dos rutas, y replacement sustituye el vehículo de una ruta por otro de la flota que no está utilizándose.
Reconstrucción de soluciones: R&R0 desconecta un nodo al azar y lo introduce en la posición y ruta más favorable, mientras que R&Rseq rompe la ruta con menor número de nodos, y los reintroduce en la mejor posición y ruta (ver Schirmpf et al., 2000).
La Tabla 1 contiene las probabilidades que tiene cada operador de ser elegido. Dichos valores han ofrecido buenos resultados en experiencias anteriores (ver Yepes, 2002).
Tabla 1 – Probabilidad de elección de los operadores
EJEMPLO DE APLICACIÓN AL PROBLEMA VRPHESTW
Se analiza un problema del tipo VRPHESTW denominado HES-A descrito en Yepes y Medina (2004, 2006). Este caso deriva del ejemplo R103 de Solomon (1987), al cual se incorporan horarios flexibles de entrega, flotas heterogéneas y una función económica caracterizada por unos ingresos y unos costes fijos y variables. El lenguaje código utilizado ha sido Visual Basic 6.0 ejecutándose los ejemplos en un ordenador Pentium IV 3.00 GHz.
En las Figuras 2 y 3 se representa el beneficio obtenido y el tiempo empleado por la heurística descrita cuando se aplica al problema HES-A. El número de iteraciones empleadas para cada escalón de velocidad ha oscilado entre 1000 y 50000. Los escalones de velocidad ensayados varían entre 3 y 100. La mejor solución encontrada se corresponde con un beneficio de 164752, obtenida para un factor inicial de modificación de la velocidad D1=130, así como 30000 iteraciones en cada uno de los 30 escalones de velocidad considerados. Sin embargo, esta solución no atiende a todos los clientes (sólo el 96.70% de la demanda queda cubierta). La mejor solución que atiende toda la demanda se corresponde con un beneficio de 155184, obtenida para un D1=150, así como 50000 iteraciones en 100 escalones de velocidad. Destacamos cómo el algoritmo es capaz de aumentar el beneficio de las operaciones a costa de renunciar al servicio a determinados clientes. La mejor solución no factible sólo precisa 12 vehículos y recorre 1224.71 unidades de distancia total, frente a los 13 vehículos y las 1260.54 unidades de distancia de la mejor solución factible. Si se pretende servir toda la demanda, bastaría endurecer las penalizaciones en la función objetivo.
Fig. 2 – Beneficio obtenido para el problema HES-A con el algoritmo propuesto, analizado por el factor inicial de incremento de velocidadFig. 3 – Beneficio obtenido para el problema HES-A con el algoritmo propuesto, analizado por la factibilidad de la solución
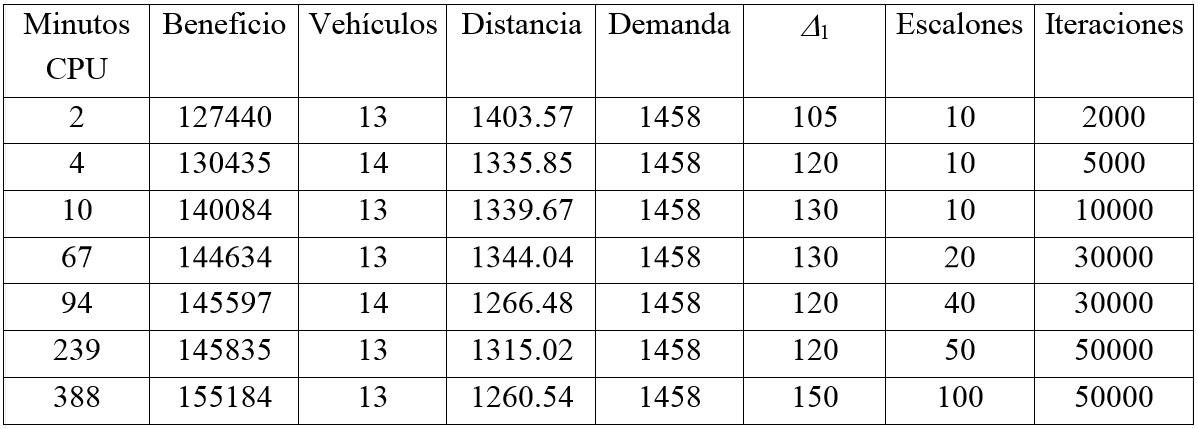
En la Tabla 2 se han recogido los valores óptimos en el sentido de Pareto de las soluciones factibles (ver Voorneveld, 2003). Dichos óptimos se corresponden con los valores de mayor beneficio en el menor tiempo de cálculo posible. Se observa que es favorable el aumento del factor de modificación inicial de la velocidad, del número de escalones y del número de iteraciones. Sin embargo, ello comporta un mayor tiempo de cálculo.
Tabla 2 – Resultados óptimos de Pareto para el problema HES-A, para las soluciones factibles
El mejor resultado obtenido por esta metaheurística (ver Tabla 3) es inferior al encontrado por el algoritmo del solterón propuesto por Yepes y Medina (2004) para un tiempo de cálculo similar. En aquella ocasión se obtuvo un beneficio de 170335, con 13 vehículos que recorrieron un total de 1229.13 unidades de distancia. Esta circunstancia sugiere que la búsqueda local de máximo gradiente empleada podría sustituirse por un algoritmo de búsqueda más agresiva, como el algoritmo del solterón.
Tabla 3 – Resultados obtenidos para el problema HES-A
CONCLUSIONES
Se ha presentado una nueva heurística denominada “Big-Bang” basada en la modificación gradual de la variable espacial donde se ubican los nodos que representan los clientes. Esta estrategia de relajación consiste en reducir progresivamente, de forma escalonada, la velocidad de todos los vehículos, de forma que, al final del proceso, todos dicha velocidad sea la que corresponde con las restricciones del problema. Este procedimiento permite una fuerte tendencia hacia la reducción inicial del número de vehículos necesarios. En la ponencia se ha empleado este procedimiento para la resolución del problema VRPHESTW. Como estrategia de búsqueda local se ha empleado un esquema de búsqueda aleatoria en entornos variables, que emplea de forma probabilista un conjunto de 9 operadores y un criterio de aceptación de nuevas soluciones de máximo gradiente. En los ensayos se ha comprobado que un aumento en el factor de incremento inicial de la temperatura, del número de escalones, y de las iteraciones proporciona un incremento en la calidad de las soluciones, si bien con un mayor tiempo de cálculo. Los resultados obtenidos son de elevada calidad, si bien se sugiere el empleo de procedimientos de búsqueda local más agresivos, como por ejemplo el algoritmo del solterón, que ha dado muy buenos resultados para la resolución de este problema.
AGRADECIMIENTOS
Los autores agradecen el apoyo en este trabajo del Ministerio de Educación y Ciencia y de los fondos FEDER (Proyectos: BIA2005-03197 y REN2002-02951).
REFERENCIAS
BALL, M.O.; MAGNANTI, T.L.; MONNA, C.L.; NEMHAUSER, G.L. (Eds.) (1995). Network Routing, Handbooks in Operations Research and Management Science, vol. 8. North-Holland, Amsterdam.
GENDREAU, M.; LAPORTE, G.; MUSARAGNY, C.; TAILLARD, É.D. (1999). A tabu search heuristic for the heterogeneous fleet vehicle routing problem. Computers and Operations Research 26, pp. 1153-1173.
HOMBERGER, J.; GEHRING, H. (2005). A two-phase hybrid metaheuristic for the vehicle routing problem with time windows. European Journal of Operational Research 162, pp. 220-238.
MEDINA, J.R.; YEPES, V. (2003). Optimization of touristic distribution networks using genetic algorithms. Statistics and Operations Research Transactions 27(1), pp. 95-112.
MLADENOVIC, N.; HANSEN, P. (1997). Variable neighborhood search. Computer and Operations Research 24(11) pp. 1097-1100.
OSMAN, I.H. (1993). Metastrategy simulated annealing and tabu search algorithms for the vehicle routing problem. Annals of Operations Research 41, pp. 421-451.
POTVIN, J.Y.; ROUSSEAU, J.M. (1995). An exchange heuristic for routing problems with time windows. J. Operational Res. Soc. 46(12), pp. 1433-1446.
RUSSELL, R.A.; CHIANG, W.C. (2006). Scatter search for the vehicle routing problem with time windows. European Journal of Operations Research 169, pp.606-622.
SCHIRMPF, G.; SCHENIDER, J.; STAMM-WILBRANDT, H.; DUECK, G. (2000). Record breaking optimization results using the ruin and recreate principle. Journal of Computation Physics 159, pp. 139-171.
SOLOMON, M.M. (1987). Algorithms for the vehicle routing and scheduling problems with time window constraints. Operations Research 35(2), pp. 254-265.
TAILLARD, É.; BADEAU, P.; GENDREAU, M.; GUERTIN, F.; POTVIN, J.-Y. (1997). A tabu search heuristic for the vehicle routing problem with soft time windows. Transportation Science 31(2), pp. 170-186.
VOORNEVELD, M. (2003). Characterization of Pareto dominance. Operations Research Letters 31, pp. 7-11.
YEPES, V. (2002). Optimización heurística económica aplicada a las redes de transporte del tipo VRPTW. Tesis doctoral. Universidad Politécnica de Valencia. 352 pp.
YEPES, V.; MEDINA, J.R. (2002). Criterio económico para la optimización de rutas con flotas heterogéneas VRPHESTW, en Ibeas, A. y Díaz, J.M. (Eds.): Actas del V Congreso de Ingeniería del Transporte. Vol. 2, pp. 693-700. Santander, 11-13 junio.
YEPES, V.; MEDINA, J.R. (2004). Algoritmo del solterón aplicado a la optimización de rutas con flotas heterogéneas VPRHESTW, en Larrodé, E. y Castejón, L. (Eds.): Actas del VI Congreso de Ingeniería del Transporte. Vol. 2, pp. 759-766. Zaragoza, 23-25 de junio.
YEPES, V.; MEDINA, J.R. (2006). Economic heuristic optimization for heterogeneous fleet VRPHESTW. Journal of Transportation Engineering, ASCE 132(4), pp. 303-311.
Cuando se trata de construir un puente con vigas prefabricadas, uno de los problemas a resolver es el transporte por carretera de dichos elementos. Debido a las características técnicas de la carga, que exceden en dimensiones, masa y carga por eje de las máxima autorizadas, se requiere de una Autorización Complementaria de Circulación que expedirá el Organismo competente en materia de tráfico. Las unidades de transporte son camiones semirremolques, habitualmente denominados «dollys».
A continuación, os paso varios vídeos explicativos y un vídeo tutorial de Javier Luque en el que se aplica el concepto de Centro Instantáneo de Rotación para el cálculo de velocidades lineales en función de los condicionantes iniciales de la velocidad angular. Un buen problema de física que se aplica al transporte de vigas de gran tamaño. Espero que os sean útiles los vídeos.
El puente Canal de Magdeburgo, sobre el río Elba. Wikipedia
El puente Canal de Magdeburgo (Alemania) es famoso por ser el acueducto navegable más largo del mundo, con una longitud total de 918 m. Este puente conecta el canal Elbe-Havel con el canal de Mittelland, que atraviesa el río Elba y sobre el que discurre el canal navegable de Magdeburgo. El objetivo es acortar kilómetros de navegación y favorecerla cuando los calados del río son excesivamente bajos.
Su construcción comenzó en 1997 y abrió sus puertas en octubre de 2003. Su coste aproximado fue de 500 millones de euros y es famoso por ser el acueducto navegable más largo del mundo. Posee una longitud total de 918 m, una anchura de 34 m y una profundidad del canal de 4,25 m. El puente tiene una luz máxima de 106 m y se construyó con cerca de 68 000 m³ de hormigón y 24 000 t de acero.
Fuente: http://discoverytumundo.blogspot.com.es/
Os dejo un par de vídeos sobre el acueducto, el primero de ellos de licitacivil. Espero que os gusten.
Podéis ampliar la información en algunos de los siguientes enlaces:
Hoy lunes 30 de marzo de 2015 se ha defendido con éxito la tesis doctoral de la profesora Cristina Torres Machí denominada «Optimización heurística multiobjetivo para la gestión de activos de infraestructuras de transporte terrestre», que optaba a la doble titulación de doctorado, tanto de la Universitat Politècnica de València (UPV) como de la Pontificia Universidad Católica de Chile (PUC). Los directores de tesis han sido la doctora Marcela Alondra Chamorro Gine (PUC), Eugenio Pellicer Armiñana (UPV) y Víctor Yepes Piqueras (UPV). La calificación ha sido la máxima posible, de sobresaliente «cum laude» por unanimidad.
Os paso el resumen de la tesis:
«A pesar de la importancia de las infraestructuras en el desarrollo económico y social, los recursos disponibles para su conservación suelen ser insuficientes, generando un deterioro acelerado de las mismas. En este contexto surge la disciplina de gestión de activos de infraestructura, que busca optimizar la asignación de recursos para la gestión, operación y conservación de la infraestructura mediante un análisis de su ciclo de vida.
Los criterios tradicionalmente empleados para evaluar las alternativas de conservación han sido los técnicos y económicos. Si bien, recientemente, se han realizado esfuerzos para cuantificar el impacto ambiental; los modelos actuales carecen de un enfoque integrado. Surge así la oportunidad de desarrollar una evaluación sostenible que integre los aspectos técnicos, económicos y ambientales en el ciclo de vida de la infraestructura.
En relación a la asignación óptima de recursos, los métodos mayoritariamente empleados son los de programación matemática y los métodos de optimización aproximada. Dentro de estos últimos, las aplicaciones de algoritmos heurísticos resultan escasas, limitándose a resolver el problema a nivel de proyecto. Estos métodos, sin embargo, han sido exitosamente aplicados para resolver problemas de optimización combinatoria en otros campos de investigación. A esto hay que añadir que las aplicaciones desarrolladas se centran, mayoritariamente, en la optimización de un único objetivo; obviando la naturaleza multiobjetivo del problema real. Se detecta, por tanto, la oportunidad de desarrollar una herramienta de optimización heurística multiobjetivo que, considerando una evaluación sostenible de alternativas, mejore la asignación actual de recursos.
A la vista de estos antecedentes, el objetivo principal de esta investigación consiste en desarrollar una herramienta para la evaluación de alternativas de conservación y la optimización heurística multiobjetivo, que permita una asignación más sostenible y eficiente de los recursos disponibles para la conservación de redes de activos de infraestructura de transporte terrestre. La herramienta propuesta se aplica a un caso de estudio real que consiste en la gestión de una red de pavimentos urbanos en Chile.
De la aplicación de la herramienta de optimización al caso de estudio se concluye que los algoritmos heurísticos basados en búsquedas por entornos resultan poco eficientes para resolver el problema de asignación de recursos de conservación. Ante esta limitación, se desarrolla un nuevo método híbrido que considera los algoritmos GRASP (Greedy Randomized Adaptative Search Procedure), GLS (Guided Local Search) y GFB (Greedy First Best). Además, el método propuesto permite evaluar las alternativas de conservación considerando, de forma integrada, criterios técnicos, económicos y ambientales.
El algoritmo híbrido propuesto diseña programas de conservación con una efectividad media un 9% superior a la obtenida con el algoritmo de búsqueda por entornos más eficaz, requiriendo para ello un menor esfuerzo computacional. En la aplicación al caso de estudio chileno, se observa que el algoritmo híbrido mejora la gestión actual, aumentando en un 22% la condición media de la red y reduciendo, además, las emisiones de CO2 en un 12%.
En términos prácticos, los programas óptimos consideran una política proactiva, en la que los pavimentos se tratan cuando la condición de los mismos aún es buena. Por último, la herramienta propuesta mejora la planificación temporal de los recursos. En base a las evidencias demostradas en el caso de estudio, se concluye que la distribución temporal del presupuesto es un factor clave en el desempeño técnico y ambiental de la red».
Palabras Clave: Sostenibilidad; sustentabilidad; análisis del ciclo de vida; gestión de infraestructura; conservación; preservación.
Hormigonera y autobomba de hormigón. https://www.hormigonescarral.com/fullscreen-page/comp-jrt5h5d4/8d695975-f455-4ffc-8f63-42c63f186bf7/45/%3Fi%3D45%26p%3Dbuk8m%26s%3Dstyle-jrt5h5ev
La elección de los medios más apropiados para transportar el hormigón hasta el punto de vertido está supeditada a un conjunto de factores relacionados con:
Las características del hormigón
Las condiciones de la obra
El volumen de hormigón y la distancia de transporte. En general deben evitarse transportes prolongados especialmente con hormigones poco consistentes en los que puedan producir más fácilmente fenómenos de segregación
Los medios utilizados, continuos o discontinuos, deben preverse de modo que el volumen de hormigón de llegada se coordine con el ritmo de vertido y con los medios de compactación. Como medios de transporte discontinuos pueden emplearse camiones hormigonera, camiones volquete, tolvas móviles, cubas, carretillas, dumpers, blondines, etc. Para el suministro continuo del material, los medios más usuales son la cinta transportadora y la impulsión o el bombeo del hormigón por tubería.
Cualquiera que sea la forma de transporte, deben cumplirse las siguientes condiciones:
Durante el transporte no deben segregarse los áridos gruesos, lo que provocaría en el hormigón pérdidas de homogeneidad y de resistencia. Deben evitarse las vibraciones y los choques, así como un exceso de agua, que favorecen la segregación. Los áridos rodados son más propicios a segregarse que los de machaqueo, debido al mayor rozamiento interno de estos últimos.
Debe evitarse que el hormigón se seque durante el transporte.
Si, al llegar al tajo de colocación, el hormigón presenta un principio de fraguado, la masa debe desecharse y no ser puesta en obra.
Cuando se empleen hormigones con diferentes tipos de cemento, se limpiará cuidadosamente el material de transporte antes de realizar el cambio.
Os dejo a continuación un vídeo de Politube donde se explica con mayor detenimiento este tema. Espero que os sea útil.
[politube2]56653:450:273[/politube2]
Referencias:
YEPES, V. (2026). Fabricación y puesta en obra del hormigón. Colección Manual de Referencia, serie Ingeniería Civil. Editorial Universitat Politècnica de València, 452 pp. Ref. 441. ISBN: 978-84-1396-418-8
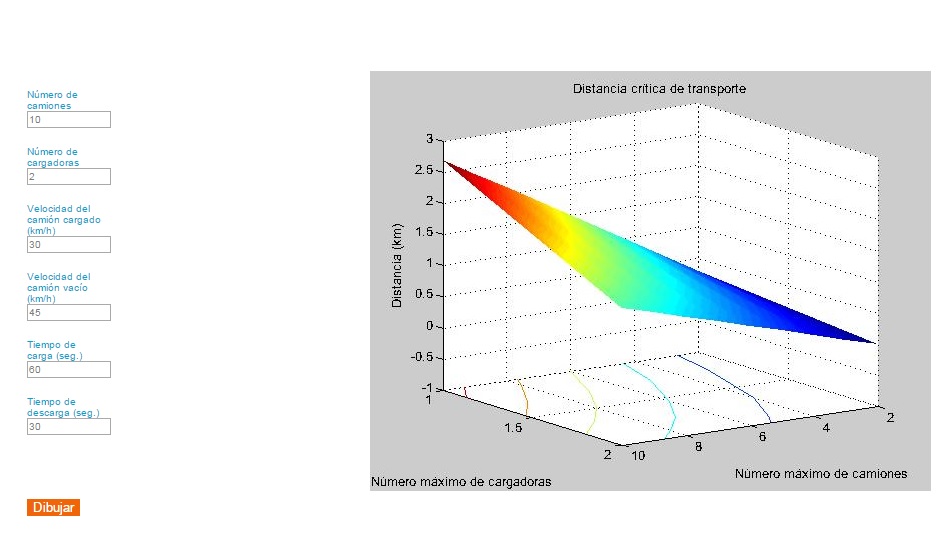
Aquí nos vamos a ocupar de la distancia crítica de transporte. En un movimiento de tierras, por ejemplo, es aquella distancia en la que el equipo de cargadoras y camiones está equilibrado. Es decir, ni sobran ni faltan camiones o cargadoras. O dicho de otra forma, es la distancia de transporte en la que no existen esperas en las máquinas. Esta es una distancia teórica, puesto que para calcularla debemos conocer todos los datos de antemano, y estos no son deterministas. Por otra parte, en obra ocurre lo contrario: tenemos una distancia de transporte como dato, pero en este caso se trataría de saber cuántos camiones y cargadoras serían necesarios para que no existiesen demoras. Afortunadamente en obra se puede corregir rápidamente cualquier desfase. Para entender este concepto os paso un laboratorio virtual que usan nuestros alumnos para facilitar la comprensión de este concepto. Espero que os guste.
Resumen: Las infraestructuras de transporte terrestre y particularmente la infraestructura vial son fundamentales en el desarrollo económico y social. El nivel de calidad percibido por el usuario viene determinado, principalmente, por el pavimento. A nivel mundial se invierte anualmente más de 400 mil millones de dólares en la construcción y el mantenimiento de pavimentos; tareas que aumentan en un 10% el impacto ambiental generado por la circulación de vehículos. Surge así la necesidad de incorporar un enfoque sostenible en la evaluación de alternativas de conservación que considere aspectos técnicos, económicos, medioambientales, políticos e institucionales de forma integrada y armónica a lo largo de su ciclo de vida. La presente investigación tiene por objeto estudiar los modelos y prácticas en la evaluación económica y ambiental de pavimentos para analizar las ventajas y las limitaciones de la práctica actual e identificar oportunidades para mejorar su gestión sostenible. Una de las principales limitaciones identificadas es la escasez de modelos que consideren de forma integrada los aspectos económicos y ambientales. Se detecta la necesidad de modelos que consideren el efecto sobre los usuarios en zonas de trabajo así como el uso de nuevas tecnologías y materiales reciclados más respetuosos con el medio ambiente.
Palabras clave: Evaluación del ciclo de vida, administración de activos, pavimentos, sostenibilidad.
Referencia: TORRES-MACHÍ, C.; CHAMORRO, A.; YEPES, V.; PELLICER, E.; (2014). Current models and practices of economic and environmental evaluation for sustainable network-level pavement management. Revista de Construcción, 13(2): 49-56.
El paradigma de la máquina empleada en ingeniería civil es la topadora, explanadora, buldócer, o como lo conocemos habitualmente en inglés, el bulldozer. Aunque se trata de un tractor sobre cadenas, también podemos encontrarlo sobre neumáticos (turnadozer), aunque es más raro. Pues bien, nuestro protagonista no nació de sopetón, sino que fue poco a poco mejorando de ideas previas. Si empezó su trayectoria en el mundo de la agricultura, ha pasado por la guerra y por la ingeniería civil y la minería. Veamos, en dos pinceladas, cuál fue el oscuro nacimiento del bulldozer.
La historia del bulldozer, tal y como hoy la conocemos, surgió de mejoras sucesivas que tuvieron su comienzo con el invento del tractor sobre orugas. Su aparición exacta en el tiempo es un poco oscura, pero en 1713, Frenchman M. D’Hermand propuso un tractor de este tipo traccionado por cabras. Hubo que esperar a 1770 para que Richard Lovell Edgeworth patentara el sistema pero propulsado a vapor. Otros inventos posteriores que mejoraron el sistema fue el desarrollado en 1826 por George Calley, unas orugas a las que denominó “vía férrea universal” (continuous track system, en inglés). Otro invento, el denominado “carruaje con orugas movibles”, fue obra de Dimitri Sagryazhsky, pero no pasó de ser un dibujo sobre un papel. Otra patente fue la de James Boydell, que registró “una rueda de vía férrea sin fin”. En la Guerra de Crimea (1853-1856) ya se usaron los primeros tractores de este tipo propulsados a vapor.
En 1877, Fyodor Blinov creó un vehículo al que denominó “carromato movido sobre raíles sin fin”. Aunque era un vehículo arrastrado por caballos, al año siguiente patentó el mismo vehículo autopropulsado a vapor. Años más tarde, entre 1881 y 1888 desarrolló dicho vehículo.
Carromato de Blinov traccionado por caballos
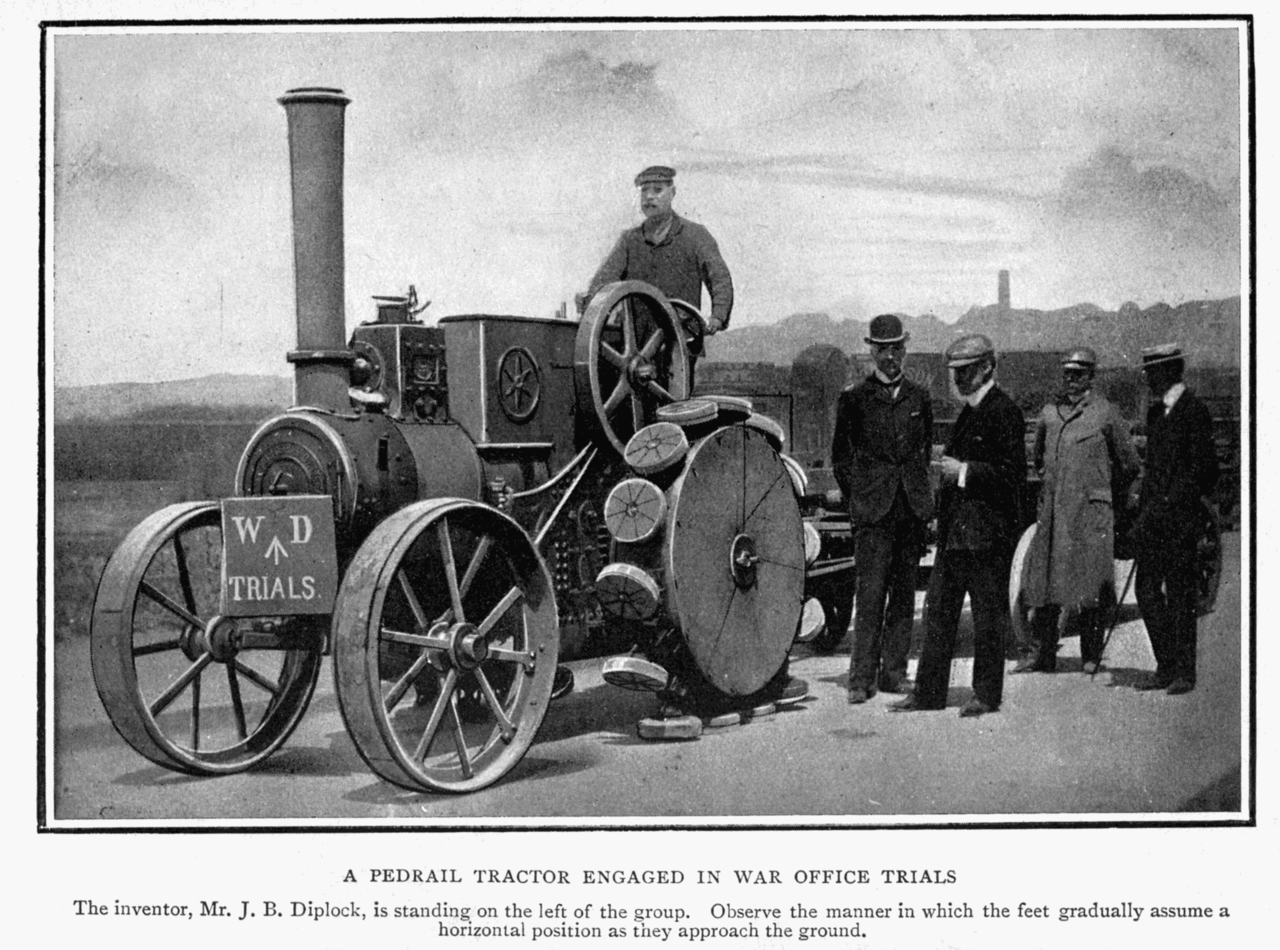
Otra patente es la de Bramah Joseph Diplock, que inventó en 1903 un sistema curioso de tracción sobre martillos “pedrail wheel”, capaz incluso de subir escaleras. Aunque esta tentativa se alejó del resultado final que conocemos hoy día.
Figura. «Pedrail wheel» de Diplock. http://www.wikiwand.com/en/Bramah_Joseph_Diplock
Sin embargo, hay que adentrarse en el siglo XX para que Alvin Orlando Lombard introdujera, en 1901, las orugas en vehículos para mejorar la tracción sobre la nieve. Era una especie de arrastrador de troncos accionado a vapor, con aspecto de locomotora. Posteriormente, estas máquinas acabaron accionándose mediante motores de combustión interna.
El término genérico “caterpillar” (tractor de oruga) fue utilizado por primera vez en 1909. En 1914 su silueta era poco diferente de los actuales. La provechosa unión del tractor de oruga y la cuchara requirió cierto tiempo.
A pesar del éxito de Lombard, no fue hasta que el pionero de la construcción Benjamín Holt transformó este invento en la popular máquina de movimiento de tierras que hoy conocemos. Holt fue jefe de Holt Manufacturing Co. en Stockton, California. Empezó a experimentar con sus tractores sobre orugas en 1906 y tuvo sus problemas con Lombard, que pensaba que el tractor de Holt era una copia de sus ideas. Al otro lado del charco, en Inglaterra, David Roberts, ingeniero jefe de R. Hornsby & Sons, patentó un sistema propio de oruga en 1904. Sin embargo, las ventas no fueron tan exitosas como las de Holt, por lo que le vendió su patente a Holt en 1914.
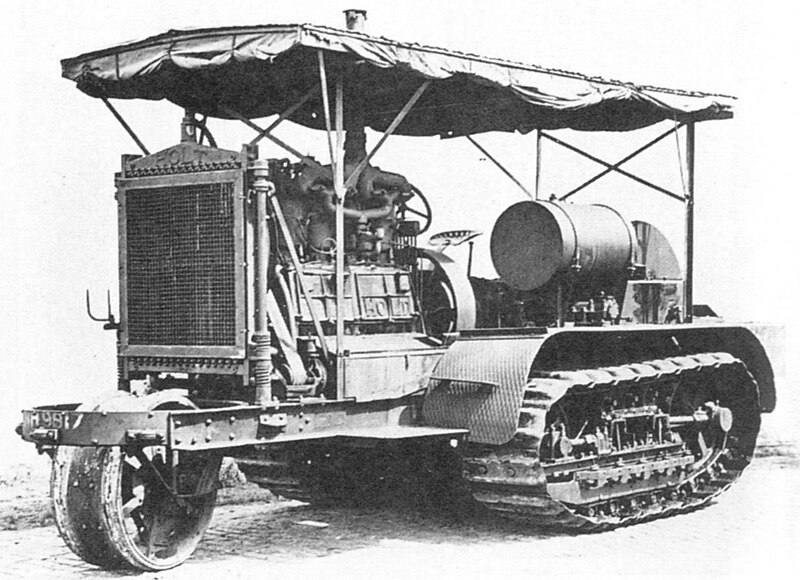
Figura. Tractor de David Roberts a vapor, sobre 1908
Figura. Tractor Hornsby, 1909
Holt empezó a aplicar motores de gasolina a los tractores. En 1906 Holt y su sobrino Pliny empezaron a probar su primer motor, hasta que en 1908 vendieron el primer tractor sobre orugas, el llamado Modelo 40, accionado por un motor de combustión interna, con 25 caballos de potencia. Estos primeros tractores tuvieron un uso agrícola, pero al aplicarles una cuchilla al frente del tractor, nació el bulldozer, tal y como lo conocemos.
Figura. Tractor Holt 120, sobre 1914
El invento de poner una hoja empujadora ya tuvo sus primeras versiones en el siglo XIX, pero con propulsión animal. Además, estas palas debían accionarse manualmente. Su versatilidad en terrenos blandos para la explotación forestal y construcción de carreteras llevó directamente a que se conviertan en el tanque blindado en la Primera Guerra Mundial.
Figura. Tractor Holt en la batalla del Somme, 1917
Sin embargo, hacia 1920 fue cuando ya se montan las primeras hojas sobre tractores de cadenas. En 1925, año en que se fundó la empresa Caterpillar, se fabrica la primera hoja de empuje de mando hidráulico, sin buenos resultados, por lo que siguió utilizando un sistema de cabrestante, cables, etcétera. Es en el año 1929 cuando se empezó a fabricar el primer modelo de bulldozer, en donde el conductor iba sentado en la parte de arriba sin una cabina cerrada que lo protegiera. En 1931, se sienta lo que sería una de las grandes bases de crecimiento y utilización de estas máquinas en obra con la introducción del motor Diesel por las casas Caterpillar y Hanomag. La hoja de empuje con mando hidráulico, y aceptables en cuanto a funcionamiento y rendimiento, aparece en el mercado en 1935. Otro gran avance tecnológico fue la introducción del convertidor de par en 1940. En el año 1968, Komatsu introduce el sistema de control por radio para un bulldozer diseñado para trabajar en zonas peligrosas, así como un modelo anfibio para profundidades de hasta 7 m. En 1970 aparece con Komatsu un bulldozer totalmente submarino que trabaja hasta 60 m en el fondo del mar.
Versiones más primitivas del buldócer han sido completadas en el siglo XIX agregando palas a los caballos, pero el tractor sobre orugas podía incrementar su poder exponencialmente. Las primeras palas sujetadas a los tractores tenían que ser propulsadas moviéndolas manualmente con timones a mano. Experimentación con buldóceres mejoró al comienzo de los años 1920s, con el primer dócer operado hidráulicamente fabricado en 1925 por LaPlant-Choate Manufacturing Co. en Cedar Rapids, Iowa. Esta cuchilla era enganchada al tractor en un bastidor rectangular, pivotando en el marco del tractor sobre orugas, y controlado por un cilindro hidráulico en la parte posterior del tractor.
El movimiento de la cuchilla fue mejorado con el desarrollo del PCU (Unidad de Poder), introducido por Robert Gilmour Le Tourneau en 1928. La nueva unidad era controlada por el uso de embragues y frenos, y estaba disponible con cuatro cabrias. La unidad de poder también fue usado en un amplio rango de otros accesorios, incluyendo escrepas de jalón y escarificadores.
Mientras que inicialmente el desarrollo de la cuchilla fue realizado separado de los tractores, compañías individuales comenzaron a unirse con fabricantes de tractores, creando un producto más sólido y unificado. Baker se unió con Allis-Chambers, Bucyrus-Erie se unió con International, y Le Tourneau se unió con Caterpillar. En los años 1940s, fabricantes de tractores integraron el desarrollo de cuchillas en sus instalaciones. Diez años después, los tractores y las cuchillas ya no eran piezas individuales, más bien, eran producidas para crear un vehículo ya muy parecido al actual.
Figura. Bulldozer actual. Caterpillar D11N.
Referencias:
YEPES, V. (2009). Breve historia de la ingeniería civil y sus procedimientos.Universidad Politécnica de Valencia.
YEPES, V. (2014). Maquinaria de movimiento de tierras. Apuntes de la Universitat Politècnica de València, Ref. 204. Valencia, 158 pp.
Los terrenos expansivos suponen un auténtico dolor de cabeza para los ingenieros. Si sumamos un terreno soluble y corrosivo, tenemos un buen problema a solucionar, tal y como nos comenta Enrique Montalar en su blog respecto a la construcción del túnel de El Regajal. Todas estas circunstancias obligaron a diseñar complejos procesos constructivos durante la ejecución del túnel con unos revestimientos estructurales de gran rigidez que, en muchos casos, debían quedar finalizados muy cerca del frente de excavación.
El túnel de El Regajal es uno de los elementos más importantes de la línea de alta velocidad Madrid-Castilla La Mancha-Comunidad Valenciana-Región de Murcia, tanto por su complicada ejecución desde el punto de vista geológico y geotécnico, como por el valor medioambiental de la infraestructura. Este túnel se incluye en el tramo Aranjuez-Ontígola, de 4,7 km de longitud, que discurre entre los términos municipales de Aranjuez (Madrid) y Ontígola (Toledo), y cuyas obras de plataforma cuentan con un presupuesto de 113,82 millones de euros. El proyecto lo hizo SENER, la empresa constructora fue la UTE ACCIONA-OBRAS SUBTERRÁNEAS y la asistencia técnica corrió a cargo de GETINSA, aunque cuando vieron lo que tenían entre manos entraron también en juego la UPM, la UPC y el CEDEX.
Os paso a continuación un vídeo que presenta el túnel de El Regajal, así como el proceso constructivo del túnel y singularidades de la obra.
 Acabamos de recibir la agradable noticia de que nuestra compañera Cristina Torres Machí ha sido elegida como ganadora de la categoría Tesis Doctoral del Premio Abertis Chile, patrocinada por la Cátedra Abertis de la Pontificia Universidad Católica de Chile. La tesis, denominada «Optimización heurística multiobjetivo para la gestión de activos de infraestructura de transporte terrestre» se defendió el 30 de marzo de 2015, optando brillantemente a la doble titulación de doctorado, tanto de la Universitat Politècnica de València (UPV) como de la Pontificia Universidad Católica de Chile (PUC). Los directores de tesis han sido la doctora Marcela Alondra Chamorro Gine (PUC), Eugenio Pellicer Armiñana (UPV) y Víctor Yepes Piqueras (UPV). La calificación fue la máxima posible, de sobresaliente “cum laude” por unanimidad.
Acabamos de recibir la agradable noticia de que nuestra compañera Cristina Torres Machí ha sido elegida como ganadora de la categoría Tesis Doctoral del Premio Abertis Chile, patrocinada por la Cátedra Abertis de la Pontificia Universidad Católica de Chile. La tesis, denominada «Optimización heurística multiobjetivo para la gestión de activos de infraestructura de transporte terrestre» se defendió el 30 de marzo de 2015, optando brillantemente a la doble titulación de doctorado, tanto de la Universitat Politècnica de València (UPV) como de la Pontificia Universidad Católica de Chile (PUC). Los directores de tesis han sido la doctora Marcela Alondra Chamorro Gine (PUC), Eugenio Pellicer Armiñana (UPV) y Víctor Yepes Piqueras (UPV). La calificación fue la máxima posible, de sobresaliente “cum laude” por unanimidad. YEPES, V.; MEDINA, J.R. (2006). Big-Bang: Un nuevo algoritmo aplicado a la optimización de redes de transporte del tipo VRPTW. Actas del VII Congreso de Ingeniería del Transporte CIT-2006. Libro CD, 8 pp. Ciudad Real, 14-16 de junio. ISBN: 84-689-8341-1.
YEPES, V.; MEDINA, J.R. (2006). Big-Bang: Un nuevo algoritmo aplicado a la optimización de redes de transporte del tipo VRPTW. Actas del VII Congreso de Ingeniería del Transporte CIT-2006. Libro CD, 8 pp. Ciudad Real, 14-16 de junio. ISBN: 84-689-8341-1.