Figura 1. Pilotes Starsol. http://www.soletanche-bachy.com.ar
Dentro de los pilotes de extracción de barrena continua podemos distinguir un procedimiento mejorado denominado STARSOL. Se trata de un sistema desarrollado por el grupo francés SOTELANCHE-BACHY, al cual pertenece la empresa española RODIO, por lo que también se llama este procedimiento Rodiostar/Starsol. Con este sistema se resuelven dos problemas que tenían procedimientos anteriores: la perforación de capas duras y la ejecución y control de la calidad del hormigonado. La perforación en capas duras se realiza mediante un motor de gran potencia, con un par de 90000 N·m, incorporando un útil de corte bajo el eje de la hélice, con lo que puede atravesar o empotrase en terrenos de 35 a 50 N/mm² de resistencia a rotura. Ello hace innecesario el uso de trépano. Tampoco se necesitan lodos ni camisa porque el hormigonado se efectúa a través del tubo interno, que funciona a modo de Tremie. El mayor problema es que las armaduras deben introducirse después del hormigonado, aunque este problema se podría resolver definitivamente con hormigones armados con fibras de acero. Los diámetros habituales de este tipo de pilotes se encuentran entre 0,40 y 1,00 m, con una profundidad máxima normal de 30 m. La potencia total instalada ronda los 250 kVA.
Los elementos principales del equipo son los siguientes:
Grúa dotada de grupo hidráulico
Mástil guía
Cabeza de rotación hidráulica
Manguera de introducción del hormigón al tubo interior
Barrena continua alrededor del tubo exterior
Tubo central con desplazamiento por el interior del tubo exterior
Sistema de gatos que permite el desplazamiento vertical del tubo central hasta 1,50 m
Útil de limpieza
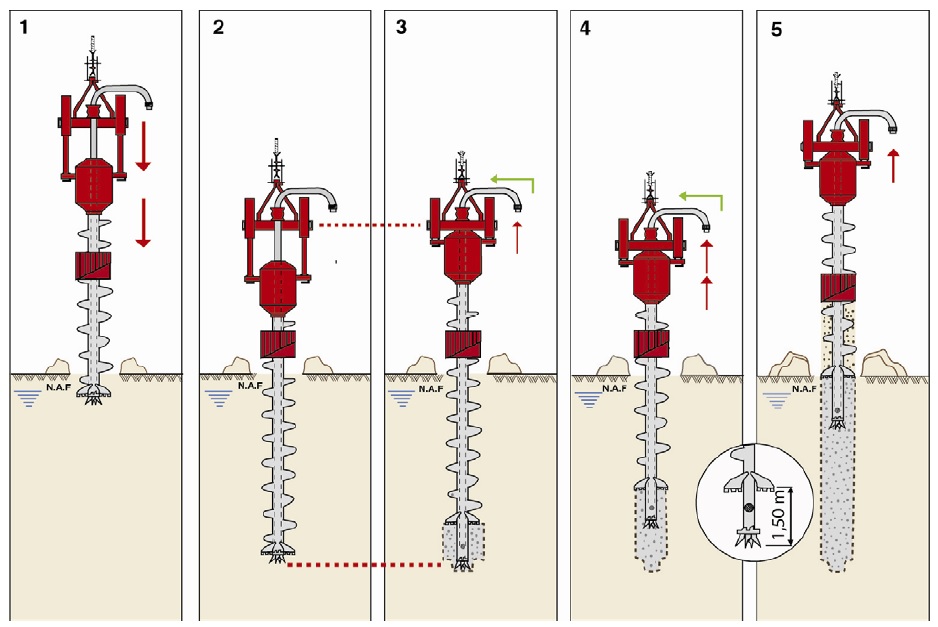
En la Figura 2 se muestran las fases constructivas del método. El procedimiento comienza con la perforación mediante rotación de la barrena. Una vez llega a la profundidad requerida, se para la rotación, se levanta el conjunto y se comienza a bombear hormigón a presión. La distancia entre las bases de la barrena y del tubo sumergido es de 1,50 m. Por último, una vez hormigonado el pilote, se coloca la armadura, incluso con vibradores si fuera necesario. La armadura se puede introducir con este método fácilmente hasta 15 m, aunque el mejor registro de 17 m se consiguió en 1988.
La diferencia entre el procedimiento STARSOL y los pilotes de barrena continua convencionales es que en los primeros el hormigón se bombea a presión (de al menos 0,1 MPa, lo que asegura un excelente contacto en cualquier terreno), de forma que dicha presión y el volumen de hormigón se encuentran controlados. Esto garantiza que el primer hormigón vertido es el único que ha estado en contacto con el terreno y el único que puede estar contaminado. En el caso de los pilotes de barrena continua clásica, el hormigón se vierte a través del tubo central de la barrena y directamente sobre el anterior, mientras que en el sistema STARSOL, se realiza mediante un tubo telescópico introducido por dicha barrena hueca, el cual puede quedar introducido hasta 1,0 m por debajo de la lámina libre de hormigón, de ahí la mayor presión de bombeo y la gran ventaja con respecto al CPI-8 convencional; pues se evita la posibilidad de cortes en el hormigón.
Figura 2. Esquema del proceso de ejecución del pilote STARSOL
A continuación os dejo algunos vídeos explicativos que creo de interés.
Referencias:
GARCÍA-VALCARCE, A.; SACRISTÁN, J.A.; GONZÁLEZ, P.; HERNÁNDEZ, R.J.; PASCUAL, R.; SÁNCHEZ-OSTIZ, A.; IRIGOYEN, D. (2003). Manual de edificación. Mecánica de los terrenos y cimentaciones. Editorial CIE Dossat 2000, 710 pp.
En algunos artículos anteriores hemos descrito algunos procedimientos constructivos de los distintos tipos de pilotes. También se han comentado en artículos anteriores algunas técnicas relacionadas con los informes geotécnicos.
Sin embargo, aquí quiero resaltar algunos casos concretos donde los informes geotécnicos pueden confundir al constructor y llevarlo a errores durante la perforación o hinca de los pilotes (Rodríguez Ortiz, 1982):
Capas delgadas de arenisca floja o vetas de arena cementadas. Las coronas de sondeo las traspasan y disgregan, confundiéndose con arenas. Las barrenas que perforan los pilotes son de diámetro mayor y no tienen potencia suficiente para romper estas capas, con lo que se hace necesario un trépano. En el caso de hinca, se suele dar rechazo al llegar a estas capas, deteniéndose la hinca, lo que supone un riesgo de punzonamiento bajo las cargas de trabajo.
Las vetas carbonatadas y costras, de naturaleza evaporítica y de espesores variables, con elevadas resistencias. Los sondeos a rotación disgregan las gravas presentes, otras veces se sacan testigos rocosos que se confunden con gravas o bolos calcáreos. Son errores de apreciación que, unido a la difícil correlación entre los cortes geotécnicos, provocan que pasen desapercibidas estas vetas y causen problemas en la hinca y en la perforación.
Las vetas silicatadas se confunden con los cantos de sílex. Son capas de extraordinaria dureza que hace difícil la penetración de los pilotes, incluso con espesores de pocos centímetros.
Bloques erráticos u obstáculos de tamaño similar al diámetro del pilote. Pueden dificultar enormemente el hincado o la perforación.
Confusión entre roca sana y alterada en el apoyo del pilote, que puede magnificar o infravalorar la capacidad portante prevista.
Evaluación de la resistencia de una capa rocosa para predecir si la excavación debe realizarse con trépano, tricono o elementos de corte rotativo.
La estructura del substrato rocoso debe caracterizarse geológicamente y con reconocimientos puntuales para determinar si las fracturas impiden la perforación rotativa para un determinado diámetro.
Los sondeos pueden interpretar una estabilidad de las paredes diferente a la perforación del pilote, pues los diámetros son diferentes. Si el terreno lo permite, se prefieren los sondeos helicoidales, pues se aproximan mejor a las condiciones de perforación del pilote.
La permeabilidad del terreno y la presencia de capas granulares abiertas pueden impedir la perforación con lodos, debiéndose recurrir a la entubación. Un sondeo convencional puede pasar por alto este aspecto, salvo que se hagan pruebas de bombeo o permeabilidad.
Referencias:
RODRÍGUEZ ORTIZ, J.M. (1982). Reconocimientos del terreno para pilotajes, en ROMANA, M. (Ed.): Apuntes sobre pilotes. Universidad Politécnica de Valencia.
Un anclaje es el elemento capaz de transmitir esfuerzos de tracción desde la superficie del terreno hasta una zona interior del mismo. En artículos anteriores vimos el concepto y la clasificación de los anclajes, la forma de ejecutar un anclaje y aspectos relacionados con la seguridad en su ejecución. En este artículo vamos a describir brevemente las diferentes zonas de un anclaje.
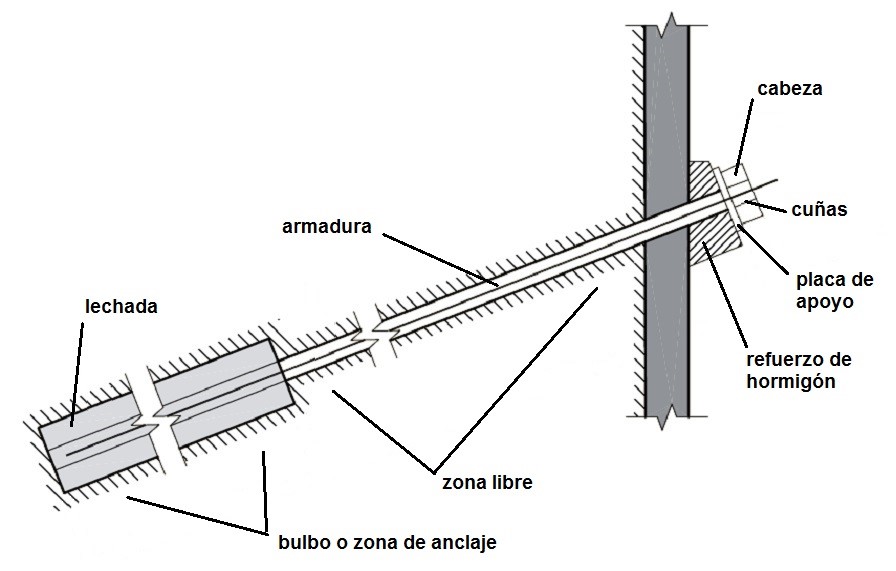
En los anclajes se distinguen las siguientes zonas (Figura 1):
Zona o bulbo de anclaje: es la parte solidaria al terreno en profundidad, encargada de transferirle los esfuerzos. Tiene características muy distintas dependiendo del procedimiento constructivo empleado. Teóricamente, se trataría de una parte fija, es decir, que no se movería ni durante el tesado ni durante la movilización del empuje activo. En la práctica se puede mover algo, pero no debe despegarse del terreno, pues entonces desaparecería la capacidad del anclaje.
Zona libre: es la parte en la que la armadura es independiente del terreno que la rodea, de forma que está libre su deformación al tensionarse. En efecto, la capacidad de deformación de esta zona libre es la que provoca la progresiva puesta en carga del anclaje. Conviene una longitud mínima de unos 5 m para que el esfuerzo aplicado se vea poco afectado por los posibles desplazamientos de la cabeza respecto a la zona de anclaje al terreno. Puede garantizarse la independencia del anclaje respecto al terreno en esta zona mediante camisas de PVC o metálicas. Sin embargo, debe garantizarse su protección contra la corrosión.
Cabeza: es la unión de la armadura a la placa de apoyo, sobre la que se ejerce la fuerza estabilizadora sobre la estructura. Dependen de cada fabricante y son similares a las utilizadas en hormigón pretensado.
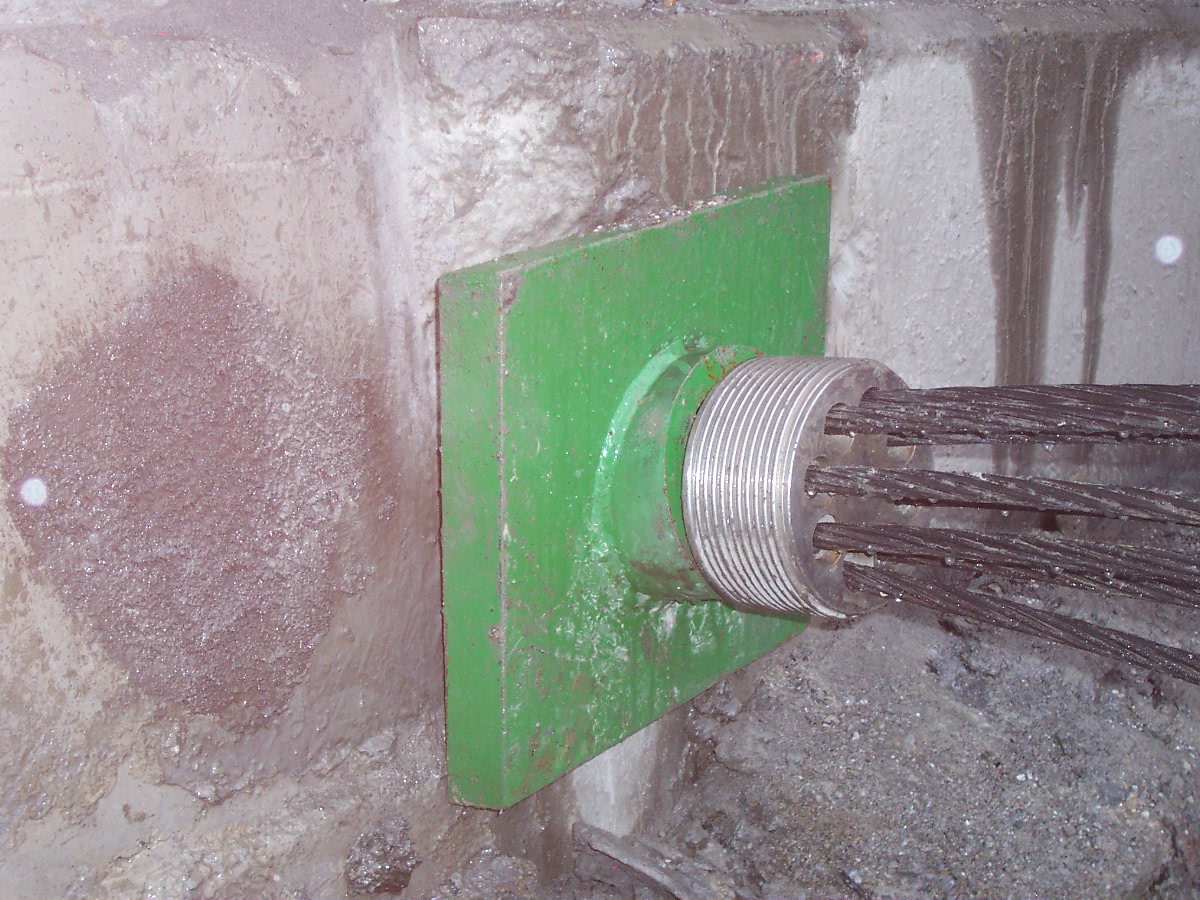
En la Figura 2 se puede observar la cabeza para un anclaje de 8 torones.
Figura 2. Cabeza para un anclaje de 8 torones. https://publicworkstoolscad.blogspot.com/
Os dejo una animación de Keller Cimentaciones respecto a la ejecución de una inyección.
La perforación rotativa por corte tuvo su máximo desarrollo en la década de los 40 en las minas de carbón americanas. Hoy día su uso se limita a las rocas blandas y de pequeños diámetros, aunque en los trabajos a cielo abierto este sistema entra en competencia con el arranque directo y en los trabajos subterráneos con la perforación rotopercusiva.
Con este sistema, la fuerza de avance trata de mantener en contacto el útil de corte con la roca, de forma que el filo sea el encargado de realizar los sucesivos cortes.
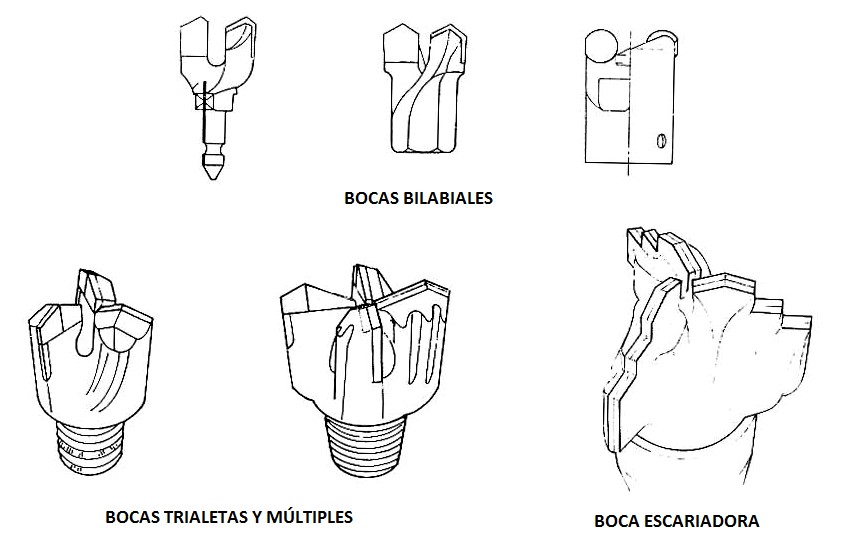
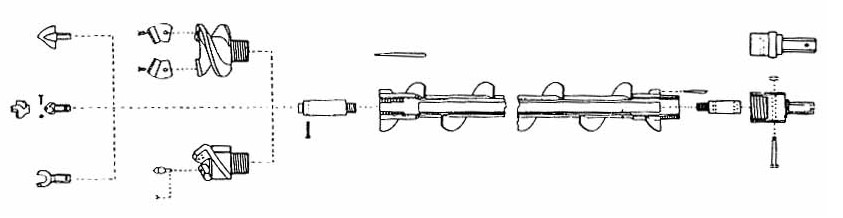
El corte se realiza con bocas que presentan elementos de carburo de tungsteno u otros materiales como los diamantes sintéticos, pudiéndose distinguir varios tipos:
Bocas bilabiales o de tenedor, en diámetros de 36 a 50 mm
Bocas trialetas o multialetas, en diámetros de 50 a 115 mm
Bocas de labios reemplazables, con elementos escariadores y perfil de corte escalonado, en diámetros de 150 a 400 mm
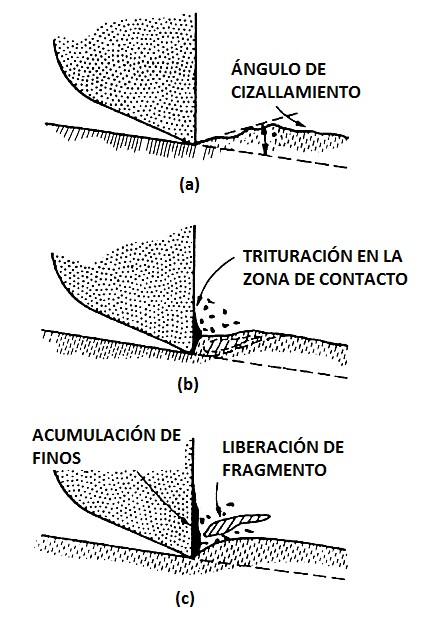
Figura 2. Tipos de bocas para perforación por corte
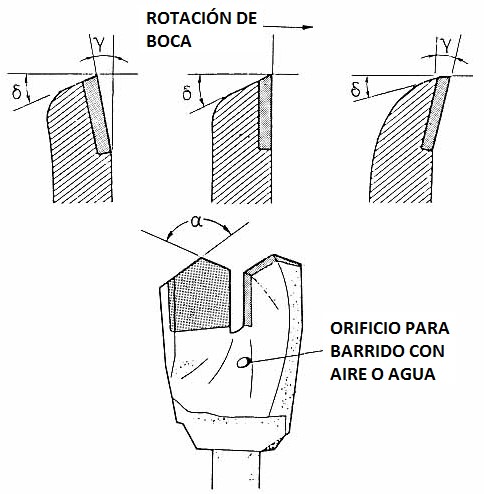
El ángulo de ataque α del útil de corte varía entre 110º y 140º, siendo más obtuso cuanto más dura sea la roca. El ángulo del labio de corte β varía entre 75º y 80º. El ángulo de corte γ oscila entre -6º y 4º, siendo positivo en rocas blandas y negativo en las duras.
Figura 3. Ángulos característicos de un útil de corte
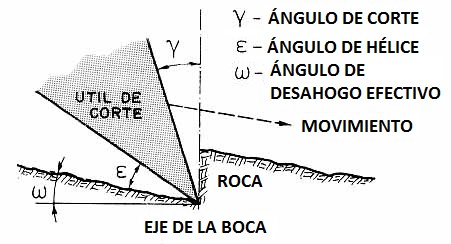
Figura 4. Trayectoria de un punto de la boca
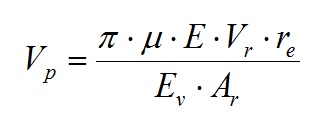
Existe una relación empírica entre el diámetro de perforación, la velocidad de penetración y el tipo de roca:
donde
Vp = Velocidad de penetración
μ = Coeficiente de fricción de la roca
E = Empuje sobre la boca
Vr = Velocidad de rotación
re = Radio efectivo de la roca
Ev = Energía específica de la roca
Ar = Área de la sección transversal del barreno
Sin embargo, en la práctica existe una desviación importante de los datos, pues el coeficiente de fricción depende del empuje y la velocidad de rotación se limita por el desgaste continuo que se produce en las bocas al aumentar el número de revoluciones.
Figura 5. Relación entre el empuje y la velocidad de penetración
En la práctica, se pueden definir dos campos claros de operatividad de este sistema de perforación rotativa:
Aquellas rocas de resistencia a compresión menor a 80 MPa
Rocas con contenido en sílice menor al 8%, para evitar un desgaste excesivo
La eliminación del detrito de perforación suele realizarse con un fluido de barrido que puede ser aire, en los trabajos a cielo abierto o agua o aire húmedo en los trabajos de interior. Emplear aire con inyección de agua no sólo facilita la evacuación del detritus y favorece la velocidad de avance, sino que también refrigera las bocas de perforación y disminuye su desgaste. Además, evita el colmatado de la perforación y elimina el polvo. Se necesita aproximadamente de 1000 a 1500 l/min de aire y por cada perforadora unos 250 cm3/min de agua.
En rocas muy blandas (30 a 40 MPa) puede emplearse varillaje helicoidal, de paso mayor cuanto más grande sea la velocidad de penetración, para evacuar el residuo de la perforación.
Figura 6. Varilla helicoidal y bocas de perforación
Os dejo a continuación un vídeo donde explico, en general, la perforación rotativa de rocas. Espero que os complemente la información anterior.
Referencias:
INSTITUTO TECNOLÓGICO Y MINERO DE ESPAÑA (1994). Manual de perforación y voladura de rocas. Ed. IGME. Madrid, 500 pp.
YEPES, V. (2014). Maquinaria para sondeos y perforaciones. Apuntes de la Universitat Politècnica de València, Ref. 209.
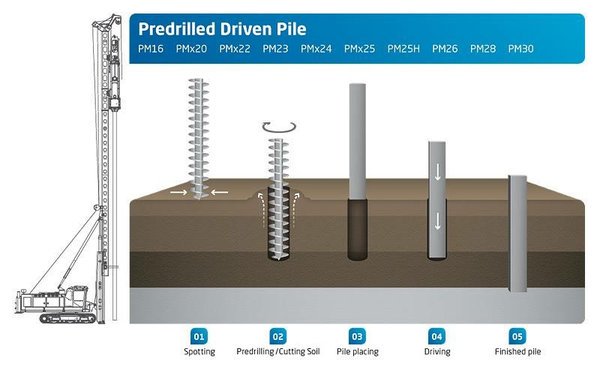
En situaciones difíciles, como estratos de arcilla compacta o roca blanda, cuando la técnica de la inyección del agua no es apropiada, se puede optar por una perforación vertical previa mediante una barrena helicoidal de un diámetro bastante inferior al pilote. Al utilizar una perforación previa, se protege el pilote de un hincado demasiado difícil y, además, se reduce el ruido y las vibraciones. El diámetro del prebarrenado dependerá del tamaño y la forma del pilote, así como de las características del terreno. Suele ser 100 mm inferior que la diagonal de la sección de pilotes cuadrados o en H, y 25 mm inferior en caso de sección circular. Sin embargo, si el terreno es muy resistente, a veces el diámetro del prebarrenado es igual a la mayor dimensión exterior del pilote.
Esta técnica es aplicable a la hinca de pilotes muy próximos a otra infraestructura, de forma que el desplazamiento radial del terreno puede afectarla. También sería de interés en el caso de que la hinca del pilote transmitiera fuertes presiones hidráulicas a distancias considerables. Otro caso sería en terrenos de gran susceptibilidad tixotrópica, donde los pilotes pueden levantarse varios metros debido a la recuperación de las propiedades del suelo.
En otras ocasiones, se recurre a la técnica del punzonado cuando los pilotes son pequeños. Esta técnica consiste en hincar un perfil pesado de acero laminado para romper estratos duros. El punzón se debe extraer antes de hincar el pilote.
A continuación, os dejo un vídeo en el que se realiza un prebarrenado antes de hincar un pilote metálico de sección en H.
Los micropilotes son pilotes de pequeño diámetro de perforación, normalmente de 80 a 300 mm, compuestos por una barra, un tubo de acero o una armadura de acero que constituye el núcleo portante, el cual se recubre normalmente de lechada de cemento que forma el bulbo. Esta inyección favorece el trabajo por rozamiento lateral del fuste. No obstante, también se denominan micropilotes a aquellos elementos hincados por golpeo o hincados mediante vibración, con un diámetro no superior a 150 mm. Los micropilotes aparecieron en los años cincuenta con los «pali-radicci» o pilotes-raíz, para solucionar los problemas de recalces de edificios o estructuras. Se trataba de perforaciones con un diámetro pequeño (de 3 pulgadas o menos), donde se introducía un redondo de acero y se inyectaba con una lechada de cemento.
Los micropilotes estructurales actuales son de mayor diámetro, entre 100 y 150 mm, e incorporan una armadura. Las características técnicas de los materiales y el modo de ejecución de estos micropilotes permiten lograr altas capacidades de carga, normalmente entre 100 y 150 kN, tanto a la tracción como a la compresión, con deformaciones mínimas. De este modo, se consigue un elemento resistente en el que predomina la longitud y la resistencia por rozamiento o fuste. Además, presentan la ventaja de no requerir grandes volúmenes de excavación del terreno. El uso de micropilotes es especialmente interesante cuando existen cargas dispersas de poca importancia, terrenos y cimientos heterogéneos, condiciones difíciles de ejecución en espacios reducidos, con restricciones en altura, o zonas congestionadas, y donde se alternan las cargas en tracción y compresión.
Las cuatro grandes áreas de utilización de los micropilotes son las siguientes:
Como cimentación o recalce de estructuras, trabajando fundamentalmente a compresión
Formando cortinas o muros discontinuos para contener terrenos o excavaciones profundas
En la corrección de corrimientos o deslizamiento, trabajando a flexión, tracción o flexotracción
Como paraguas de sostenimiento en bocas de túneles, como paso de terrenos muy difíciles o para recuperar tramos con hundimientos.
Hoy en día también se utilizan micropilotes de gran capacidad, con diámetros de 300 mm o, en casos excepcionales, incluso mayores, en los que se introduce como elemento resistente un perfil metálico, generalmente tubular, capaz de resistir 2000 kN o más. Posteriormente, se inyecta mortero de cemento para rellenar la sección interior del perfil y sellar la corona exterior entre el perfil metálico y el terreno. Con perforación a rotopercusión, se alcanzan rendimientos de 50 a 100 m por turno. Sin embargo, los costes de este sistema son superiores a los de otros pilotes y solo se justifica cuando hay que atravesar zonas rocosas.
La maquinaria empleada para ejecutar los micropilotes presenta varias ventajas respecto a la de los pilotes. Es más accesible y maniobrable en espacios pequeños, reduce los movimientos durante la ejecución y, por tanto, las deformaciones en estructuras vecinas, se puede adaptar a suelos duros, heterogéneos y con obstáculos y mantiene bien la verticalidad. Sin embargo, no son tan aptos en terrenos saturados o con un nivel freático superior a la cota inferior de la cimentación. En la figura 2 se muestran algunas máquinas empleadas para ejecutar micropilotes.
Figura 2. Maquinaria empleada en la ejecución de micropilotes. Fuente: http://www.civogal.com/
La armadura debe colocarse inmediatamente después de finalizar la perforación del taladro. Para ello, se habrá comprobado que no hay obstáculos en el taladro. La armadura se ubicará sin que se muevan los centradores o los manguitos. Los centradores garantizan la colocación correcta de la armadura y aseguran un recubrimiento mínimo frente a la corrosión, de modo que no impidan la inyección. Se deben instalar, al menos, dos centradores, a distancias que no superen los 3 m. El límite elástico del acero de la armadura tubular suele ser de 560 MPa, mientras que el de las barras corrugadas suele ser de 500 MPa.
Tras la colocación de la armadura, debe inyectarse el micropilote lo antes posible (preferiblemente, en menos de 24 horas) con lechada o mortero de cemento. El objetivo es doble: por un lado, ejecutar el fuste y la punta del pilote propiamente dichos, rellenando tanto el espacio entre el tubo y la perforación como el interior del tubo y, por otro, protegerlo de la corrosión. La relación agua/cemento, en peso, de la lechada debe situarse entre 0,40 y 0,55, y la resistencia característica no debe ser inferior a 25 MPa.
En ocasiones, las pérdidas de inyección son tan elevadas, de 2,5 a 3 veces el volumen teórico necesario, que es necesario realizar una inyección previa con lechada o mortero de cemento que habrá que reperforar para continuar con el micropilote.
La inyección del micropilote se realiza por circulación inversa, bombeándose desde la central de fabricación de lechada mediante el empleo de batidoras de alta turbulencia. La inyección se realiza desde el interior de la armadura hasta el fondo del taladro, ascendiendo por el espacio anular existente entre la armadura y el varillaje de perforación, desplazando al exterior el posible detritus de perforación. Según su forma de ejecución, los micropilotes pueden estar inyectados a baja o a alta presión. En los primeros, se reproduce la técnica del pilote de gran diámetro y se inyecta mortero o mezcla cementicia de forma que se recubre el elemento de acero que constituye la armadura. Los micropilotes inyectados a alta presión se realizan en una o varias etapas a través de válvulas antirretorno, colocadas en la parte más profunda del micropilote, de forma que se conforme un bulbo que transmita las cargas en profundidad. Esta última técnica es similar a la inyección de terreno no cohesivo, que forma una serie de bulbos que, en su conjunto, conforman el elemento de transmisión de la carga del micropilote al terreno.
Se utilizan distintos tipos de inyección con los micropilotes:
(IU) “Global única”: Se inyecta en una fase desde la base inferior del tubo de armado, desde donde asciende el material de relleno entre las paredes de este y la del encamisado, si lo hay, o del terreno, si no lo hay. La presión de inyección debe ser superior a la mitad de la presión límite del terreno e inferior a dicha presión límite. Es adecuado para rocas más o menos sanas, suelos cohesivos muy duros y suelos granulares.
(IR) “Repetitiva única”: La inyección se realiza en dos fases: la primera, como en el caso del IU, y posteriormente a través de rejillas practicadas a lo largo del tubo. Una vez terminado el proceso, se realiza una inyección final de relleno de la armadura tubular. La presión en la boca del taladro debe cumplir las mismas condiciones que en el tipo IU. La inyección se realiza entre 500 kPa y la mitad de la presión límite del terreno. Es adecuado para rocas blandas y fisuradas, así como para materiales granulares gruesos de compacidad media.
(IRS) “Representativa o repetitiva selectiva”: Se utilizan válvulas antirretorno dispuestas a lo largo de la tubería de armado. Se puede inyectar más de dos veces, en función de la admisión de lechada. La presión de inyección es alta, entre 1000 kPa y la mitad de la presión límite del terreno. Una vez finalizado el proceso, se realiza una inyección final de relleno de la armadura tubular. Es adecuada para suelos cohesivos no muy duros, suelos de consistencia baja o media y suelos granulares en los que se intenta crear un bulbo.
Al inyectar una lechada, debe guardarse una relación entre el diámetro efectivo y el teórico. En bolos y gravas es 2 veces el diámetro teórico de perforación, mientras que en arcillas es 1,4 veces y en arenas, 1,2 veces.
Los micropilotes también se pueden realizar hincando una única tubería y sin inyección de lechada. Es el caso de una cimentación provisional o cuando posteriormente se vaya a excavar, dejando los micropilotes a la vista. Al ser de acero, esto permite soldar una estructura de arriostramiento. Incluso se pueden formar «muros-pantalla» de micropilotes (figura 3) que contengan tierras en un vaciado, en cuyo caso se descubre la lechada para soldar vigas metálicas a los tubos como estructura auxiliar para el arriostramiento y el apuntalamiento provisional del muro.En un artículo anterior podéis ver qué medidas de seguridad se deben adoptar en la ejecución de este tipo de cimentación profunda.
Figura 3. Pantalla de micropilotes con anclajes. Fuente: http://www.geotec262.com/micropilotes-anclajes
A continuación os dejo un vídeo explicativo sobre micropilotes de goetecnia.ONLINE
Os dejo un par de animaciones de Keller sobre la ejecución de micropilotes.
También resulta de interés este vídeo de geotecnia.online sobre pruebas de carga en micropilotes.
En un artículo anterior explicamos los fundamentos de la perforación por extracción de material. De entre los procedimientos existentes, la perforación mecánica por rotación constituye uno de los procedimientos más habituales. Aquí vamos a explicar los principios básicos en los que se basa.
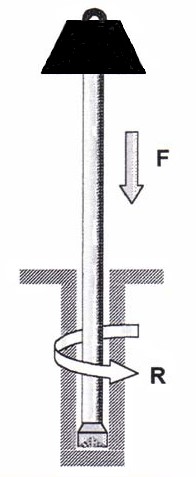
El principio utilizado por las perforadoras rotativas consiste en aplicar energía al terreno haciendo rotar un útil de corte o destroza conjuntamente con la acción de una fuerza de empuje. Este tipo de perforación se empezó a emplear en minería sobre rocas blandas; sin embargo, la rapidez de desplazamiento y montaje de estos equipos, la variedad de útiles de corte han favorecido su uso en otros campos.
El giro del útil lo realiza el motor de la perforadora en superficie, que acciona una mesa o cabeza de rotación que, a su vez, mueve el tren de varillaje y este finalmente transmite el giro al útil. Los útiles de corte que se emplean en rotación son las barrenas helicoidales, las coronas circulares y las cabezas tricono, según el tipo de terreno, del diámetro del talador y de la finalidad de la perforación (extracción de testigos o avance a destroza).
La perforación a rotación presenta características diferentes si se efectúa en roca o en suelos. En roca el avance se produce por corte y compresión: el giro se ejecuta mediante sonda o rotor y la presión por barra de carga, varillaje y empuje hidráulico. En el caso de los suelos, si estos son granulares no demasiado cohesivos, la perforación se realiza con una barrena helicoidal; en el caso de granulares muy sueltos es necesario el uso de cucharas.
El avance de la perforación rotativa en rocas se produce por la influencia simultánea de la presión que el útil de corte ejerce sobre el terreno y el efecto producido por el giro de dicho útil sobre la roca. Estas dos acciones se pueden provocar con diversos medios y potencia según las fuentes de energía y los sistemas de empuje y rotación empleados.
Las formas de energía motriz de uso más frecuente son la térmica y la eléctrica. La primera se suele utilizar en perforadoras pequeñas y medianas, generalmente montadas sobre camión en equipos accionados por el propio motor del camión o más frecuentemente por dos motores, el del camión más otro independiente. Para perforadoras montadas en equipos de mayor tamaño (diámetros de perforación superior a 250 mm, lo más normal es usar energía eléctrica a media tensión, alimentando la perforadora con corriente alterna. En algunas instalaciones mineras también se emplean equipos diésel-eléctricos cuyo coste de mantenimiento es aproximadamente un 15 % inferior al de los equipos diésel.
La aplicación de la potencia se realiza mediante mecanismos de transmisión mecánicos e hidráulicos. La energía se transmite a través de las barras de perforación, que giran al mismo tiempo que penetra la boca, debido a la intensidad de la fuerza de avance. Prácticamente, casi sin excepciones, esta fuerza de empuje se obtiene a partir de un motor hidráulico. En este tipo de perforación, las pérdidas de energía en las barras y la boca son despreciables, por este motivo, la velocidad de penetración no varía apenas con la longitud del barreno. Para girar las barras y conseguir el par necesario, estas máquinas tienen un sistema de rotación montado habitualmente sobre un bastidor que se desliza a lo largo del mástil de la perforadora. El barrido del detritus de la perforación se efectúa con aire comprimido, para lo cual el equipo está dotado de uno o dos compresores ubicados en la sala de máquinas.
Figura 2. Perforación a rotación para estudios de terrenos
Empuje y elevación
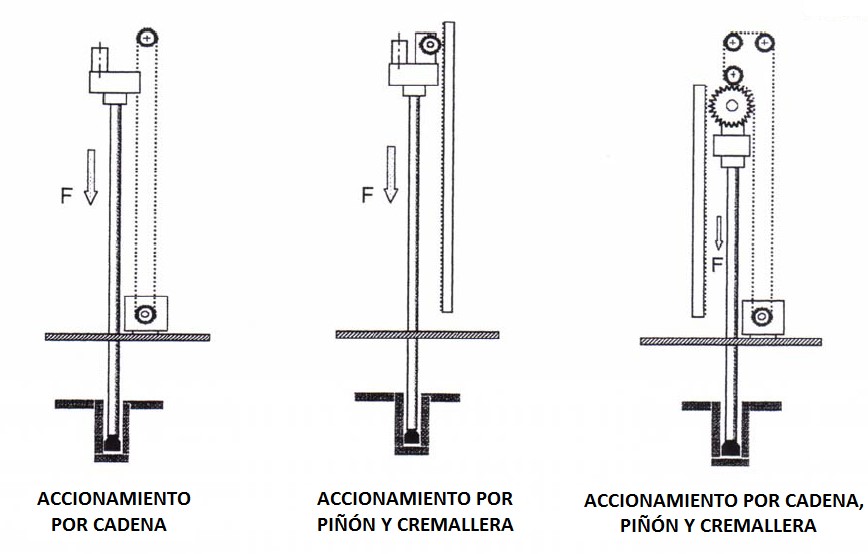
El empuje a aplicar dependerá de la resistencia del terreno y del diámetro de la perforación (Figura 3). El mecanismo de empuje está diseñado para aplicar una fuerza del orden del 50% del peso de la máquina, alcanzando los equipos de mayor tamaño un peso de unas 120 t. Los sistemas de empuje, además de proporcionar la presión suficiente sobre el fondo de la perforación, sirven para elevar y manipular el conjunto de varillas o barras que hay que añadir o quitar durante la ejecución de la perforación. Se pueden emplear sistemas mecánicos (por cadena o cremallera) o hidráulicos. Los sistemas hidráulicos están formados por dos cilindros combinados, son más potentes y fácilmente controlables.
Figura 3. Mecanismos de empuje y elevación
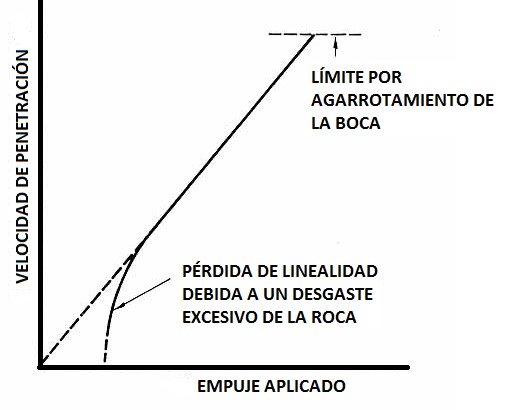
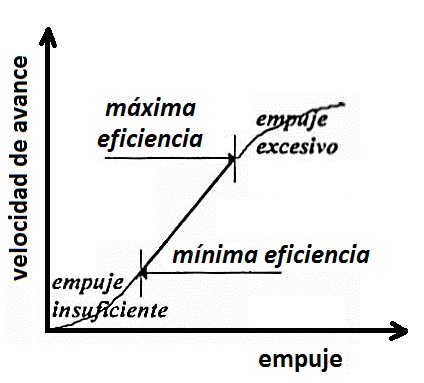
El empuje transmitido al fondo del taladro debe ser suficiente para que el efecto conjunto sobre la roca genere una tensión superior a su resistencia a compresión. Pero tampoco conviene un empuje excesivo que aumente el desgaste del equipo. La velocidad de penetración aumenta proporcionalmente al empuje hasta un límite a partir del cual el útil se agarrota y los insertos se incrustan en la roca. En estas condiciones, el desgaste aumenta considerablemente junto con un mayor consumo de energía y, si la roca es dura, puede producirse la rotura de los dientes del útil (Figura 4).
Figura 4. Relación velocidad de avance-empuje
Como suele ser habitual, os dejo unos vídeos al respecto.
Referencias:
DIRECCIÓN GENERAL DE CARRETERAS (1998). Manual para el control y diseño de voladuras en obras de carreteras. Ministerio de Fomento, Madrid, 390 pp.
INSTITUTO TECNOLÓGICO GEOMINERO DE ESPAÑA (1994). Manual de perforación y voladura de rocas. Serie Tecnológica y Seguridad Minera, 2ª Edición, Madrid, 541 pp.
MARTÍ, J.V.; YEPES, V.; GONZÁLEZ, F.; ALCALÁ, J. (2012). Técnicas de voladuras y excavación en túneles. Editorial de la Universitat Politècnica de València. Ref. 530, 165 pp.
UNIÓN ESPAÑOLA DE EXPLOSIVOS (1990). Manual de perforación. Rio Blast, S.A., Madrid, 206 pp.
Cuando se utilizan lodos tixotrópicos para el sostenimiento de la perforación, o estamos ante la presencia de agua, la barrena helicoidal no puede retirar el material, pues éste se escurre entre los pasos de ésta. En estos casos se emplea la perforación rotativa con cazo (bucket auger boring).
La perforadora con cazo rotativo utiliza un accionamiento mecánico o hidráulico que hace girar una Kelly que se fija a la cuchara. Para perforar, la cuchara gira para permitir que la parte inferior de los dientes de corte llene la cuchara. Las aletas en el fondo de la cuchara se cierran para mantener los detritus en su interior. El fondo de la cuchara es abatible (Figura 1) para permitir el vertido de la excavación.
La perforación con cazo es más lenta, con rendimientos previstos pueden ser la mitad (40-50 m/turno) de los conseguidos con hélices. Si bien es cierto que pueden triplicar los alcanzados con cuchara de valvas. Existen variantes de cazo con dientes de tierra, con dientes de widia, de fondo plano, se entrada simple, doble, etc.
Este sistema presenta algunos inconvenientes, además de los asociados a la perforación con lodos. Cuando se extrae el cazo se ejerce cierta succión que puede inestabilizar las paredes. Este efecto es particularmente sensible con diámetros de 500 mm o menos, por lo que lo habitual es perforar con cazo por encima de los 600 mm de diámetro.
Figura 2. Cazo rotativo
Os dejo algunos vídeos que ilustran la forma de trabajar con este tipo de perforación rotativa.
En el siguiente vídeo de Keller se muestra la perforación de un pozo de gran diámetro mediante cazos de diámetros sucesivamente mayores. Previamente se ha realizado una pantalla de pilotes secantes.
Referencias:
INSTITUTO TECNOLÓGICO Y MINERO DE ESPAÑA (1994). Manual de perforación y voladura de rocas. Ed. IGME. Madrid, 500 pp.
YEPES, V. (2014). Maquinaria para sondeos y perforaciones. Apuntes de la Universitat Politècnica de València, Ref. 209. Valencia.
Central de tratamiento de lodos. Imagen de Catalana de Perforacions
La bentonita es el nombre con el que se denominan a ciertos tipos de arcillas que poseen propiedades tixotrópicas cuando se mezclan con el agua. Debe su nombre a su descubrimiento cerca de Fort Benton, en los Estados Unidos en el siglo XIX. Las bentonitas comerciales son silicatos de aluminio hidratados y contienen fundamentalmente el mineral montmorillonita. El nombre de este tipo de arcilla se debe a su descubrimiento en cerca de Montmorillon, en Francia. Hoy día se utilizan distintas clases de bentonita tanto en ingeniería civil como en edificación, pudiendo variar sensiblemente sus propiedades en función de su origen.
Uno de los usos más frecuentes de la bentonita es como fluido estabilizador de excavaciones, donde compite con los fluidos a base de polímeros, fundamentalmente en la ejecución de pilotes. Dentro de este uso, la estabilización de excavaciones de muros pantalla esta ampliamente difundida en España. Los fluidos bentoníticos se utilizan también habitualmente para estabilizar las paredes de la excavación de pilotes excavados de cierto diámetro e incluso en los de pequeño diámetro en competencia con las entibaciones recuperables. En esta aplicación el fluido bentonítico debe se capaz de formar una barrera o bizcocho (cake) en las paredes de la excavación a fin de impedir la pérdida de fluido en el terreno, creando una capa contra la que puede actuar la presión del fluido para contrarrestar las presiones externas del terreno o las aguas freáticas. Otro uso habitual, del cual ya hemos hablado en una entrada anterior, es como fluido de perforación en la Perforación Horizontal Dirigida. También se usa la bentonita en la creación de barreras húmedas en el terreno para contener el agua de zonas contaminadas. Son las pantallas plásticas (Cutter Soil Mixing). En esta aplicación se suele mezclar con cemento u otros materiales a fin de crear un slurry que permanece en estado fluido durante varias horas antes de adquirir mayor consistencia y funcionar como barrera. En ciertas ocasiones se suele introducir una membrana flexible en la barrera. Por último, los fluidos bentoníticos también se utilizan para la contención del frente de excavación en túneles, delate de las tuneladoras y para el transporte de los restos excavados hacia las unidades desarenadoras situadas en la parte posterior del convoy.
Sin embargo, las propiedades de las bentonitas varían y, por tanto, no todas sirven para todos los usos. Por ejemplo, la propiedad de resistencia del estado de gel es importante si el fluido bentonítico esta en reposo y debe ser capaz de contener sólidos en suspensión, y no es por el contrario importante si el fluido es agitado continuamente en un sistema con recirculación. Las propiedades de las bentonitas deben considerarse antes de usar un tipo determinado para una aplicación específica. Independientemente de estas variaciones en cuanto a sus característica, las bentonitas deben cumplir los siguientes requisitos y funciones:
Mantener los frentes de la excavación aportando presión hidrostática a las paredes de la misma.
Mantenerse dentro de la excavación sin fluir hacia el suelo colindante.
Mantener en suspensión los detritus procedentes de la excavación.
Permitir ser desplazados con facilidad y limpiamente por el hormigón, sin una afección significativa a la adherencia armadura-hormigón.
Debe ser posible su limpieza de sólidos en suspensión mediante el bombeo y paso por desarenadoras para su reutilización posterior.
Ser bombeables con facilidad.
En general, las tres primeras propiedades requieren un producto denso y las tres últimas un producto muy fluido. Hay por tanto un conflicto que debe ser resuelto en cada caso antes de la puesta en obra del fluido estabilizador.
En el vídeo que sigue se puede observar la elaboración de bentonita para su uso en un muro pantalla.
En este otro, podéis ver su uso en un pilote.
https://www.youtube.com/watch?v=FpV6Oi2ZG7w
En el vídeo que os dejo a continuación se profundiza en el uso de los lodos como fluido de perforación. Espero que os sea de utilidad.
Figura 1. Martillo en cabeza. http://osebe.es/perforaciones-con-martillo/
En una entrada anterior ya se comentaron los fundamentos básicos de la perforación a rotopercusión. El principio de perforación de estos equipos se basa en el impacto de una pieza de acero llamada pistón, sobre un útil, que a su vez transmite la energía al fondo del barreno, por medio de un elemento final denominado boca o bit. Este sistema de perforación suele usarse en terrenos muy duros y semiduros. Estas perforadoras, tal y como se comentó anteriormente, pueden tener el martillo en cabeza o en fondo.
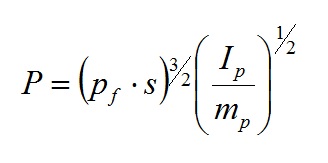
La potencia necesaria de un martillo se puede estimar mediante la siguiente expresión:
donde,
P = potencia del martillo
pf = presión del fluido (aire o aceite) en el interior del cilindro
s = superficie de trabajo del pistón
Ip = carrera del pistón
mp = masa del pistón
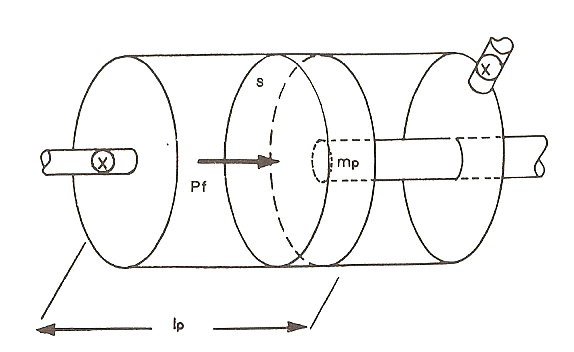
Figura 2.- Elementos para el cálculo de la potencia del martillo
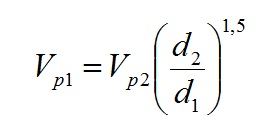
Es posible estimar la velocidad de penetración Vp1 para un diámetro dado d1, cuando, utilizando el mismo equipo en similares condiciones, se conoce la velocidad Vp2 que se alcanza para otro diámetro d2.
Referencias:
INSTITUTO TECNOLÓGICO Y MINERO DE ESPAÑA (1994). Manual de perforación y voladura de rocas. Ed. IGME. Madrid, 500 pp.
YEPES, V. (2014). Maquinaria para sondeos y perforaciones. Apuntes de la Universitat Politècnica de València, Ref. 209. Valencia.