El punto de funcionamiento o de operación de una bomba centrífuga se define como el flujo volumétrico de fluido que esta enviara cuando se instale en un sistema dado. El régimen de trabajo se determina por el punto de intersección de las características de la bomba y de la tubería. Por eso, al ser la característica de la conducción (tubería) invariable, salvo que se actúe sobre la válvula de impulsión, el cambio del número de revoluciones de la bomba provocará el desplazamiento del punto de trabajo a lo largo de la característica de la tubería. Si esta corta a una parábola de regímenes semejantes, al cambiar el número de revoluciones y pasar a otra curva característica, la semejanza se conservará, pudiéndose considerar en este caso que el cambio del número de revoluciones de la bomba no alterará la semejanza de los regímenes de trabajo.
Para aclarar un poco más este tema, os dejo un problema resuelto y un vídeo con los conceptos básicos resueltos. Espero que os sea de interés.
Referencias:
YEPES, V.; MARTÍ, J.V. (2017). Máquinas, cables y grúas empleados en la construcción. Editorial de la Universitat Politècnica de València. Ref. 814. Valencia, 210 pp.
Llamada en cierta bibliografía excavadora “ladder ditcher”, consiste en una serie de cangilones o cuchillas montados generalmente sobre orugas, que excavan en la dirección del eje de avance de la máquina y vierte las tierras, sobre una cinta transportadora dispuesta en dirección transversal a la excavadora. La tierra excavada se deposita en un cordón lateral o se carga en las unidades de transporte.
Sus elementos esenciales son:
El brazo de cangilones, móvil mediante cilindros hidráulicos hasta una inclinación máxima de 55º respecto a la horizontal, que tienen montados cangilones con cuchillas para terrenos no rocosos, dientes cónicos o picas en terrenos rocosos y dientes cuadrados en terrenos congelados.
Nivelador de fondo, con el que se consiguen zanjas de fondo limpio, llevando una zapata en su estructura que impide a la máquina excavar a más profundidad de la requerida.
Transportador de descarga, situado transversalmente al eje longitudinal, y consiste en una cinta transportadora con altura de descarga regulable.
La máquina empieza excavando sin moverse, descendiendo el brazo de cangilones hasta la profundidad deseada, posteriormente avanza y mantiene una velocidad compatible con la naturaleza del terreno, al igual que la velocidad de los cangilones.
Zanjadora utilizada en la segunda fase del postrasvase den Villena. Fuente: http://www.diarioinformacion.com/elda/2010/03/22/monstruo-terreno/991803.html
De las zanjadoras, el de tipo de brazo inclinable es el que permite cavar la trinchera más ancha. Con cangilones normales, esta anchura llega hasta 0,90 m y con los dientes desbordantes, alcanza 1,45 m. El radio de las curvas que pueden abordarse sin levantar el brazo es de unos 25 a 50 m. En zanjas estrechas no se usa esta máquina.
Una de las zanjadoras más grandes del mundo se ha empleado en Villena para acelerar las obras del post-trasvase Júcar-Vinalopó. Es una máquina de 180 t, con una longitud de 4 m de ancho y 9 m de largo. Con esta máquina se pueden abrir de 100 a 120 m de zanja al día.
Os dejo a continuación varios vídeos que explican el funcionamiento de esta máquina.
Referencias:
YEPES, V. (2014). Maquinaria de movimiento de tierras. Apuntes de la Universitat Politècnica de València, Ref. 204. Valencia, 158 pp.
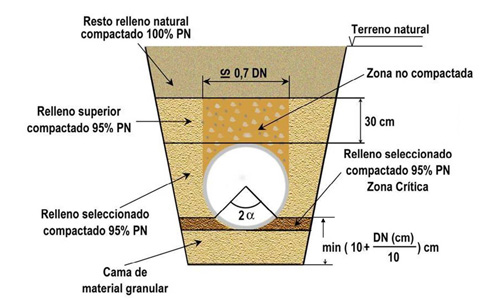
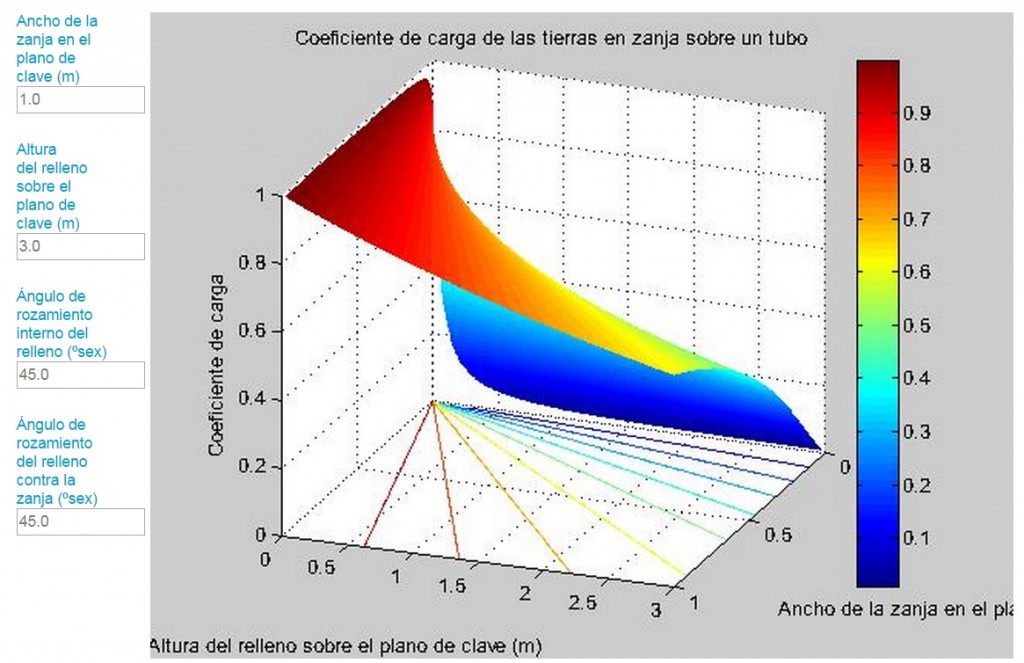
El empuje de las tierras sobre un tubo instalado en zanja influye decisivamente en su dimensionamiento. Su magnitud depende tanto de las características geométricas de la zanja y del tubo como de las características propias del terreno. A continuación os dejo un enlace a una página donde podéis entender cómo varía el coeficiente de carga de las tierras sobre un tubo instalado en zanja, en función de las características del terreno, las dimensiones del tubo y la geometría de la propia zanja. Para ello se debe seleccionar: el ancho de la zanja (hasta un máximo de 5 m), la altura de relleno (hasta un máximo de 10 m), el ángulo de rozamiento interno del relleno y el ángulo de rozamiento del relleno contra la zanja (ambos en grados sexagesimales, hasta 50º). No se admiten valores negativos.
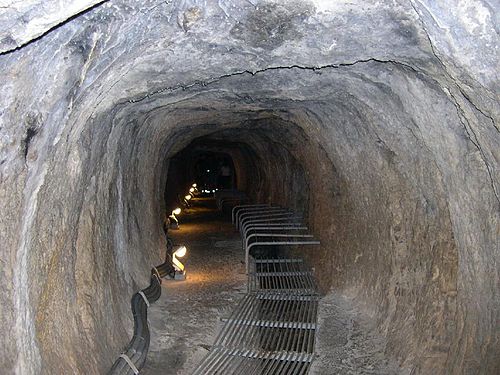
El túnel de la isla de Samos, en aguas del mar Egeo, es el primero del que se conoce el nombre de su ingeniero, Eupalinos de Megara. Este ingeniero griego es hijo de Naustrophos y es famoso por su habilidad en la construcción de acueductos y túneles, así como por su conocimiento en la aplicación de técnicas matemáticas y geométricas en la construcción. El Túnel de Eupalinos se puede visitar todavía hoy en día y es un importante yacimiento arqueológico y turístico en Samos.
Se trata de una obra de un kilómetro de longitud que trascurre bajo el monte Kastro y que fue construida hacia el 530 a. C., durante el mandato del tirano Polícrates. El túnel se excavó manualmente en roca caliza, con una sección cuadrada de 1,75 m x 1,75 m, y sirvió de apoyo para la construcción del acueducto de la capital de la isla, que hoy recibe el nombre de Pitagoreión, y como vía de escape en caso de asedio. Se extrajeron 7000 m³ de roca, para lo cual se emplearon unos 4000 esclavos, y la construcción del túnel y del acueducto duró más de una década. El historiador Heródoto describió la obra en su Libro III.
El túnel, que estuvo en funcionamiento durante más de mil años, fue considerado una de las siete maravillas del mundo helenístico y, sin duda, una de las obras maestras de la ingeniería de la antigüedad. En efecto, el problema más importante al que se tuvo que enfrentar Eupalinos fue superar los errores en la medición para que los dos equipos que excavaban el túnel desde los dos extremos se encontraran. Finalmente, solo hubo una desviación lateral de 6 m y vertical de 60 cm. A lo largo de la galería todavía se puede ver la línea de nivel que servía de guía para la excavación, con una pendiente bastante regular del 0,4 %. También se conservan inscripciones de los responsables de cada grupo de trabajo a lo largo del túnel. Os propongo que expliquéis cómo se podría realizar el cálculo usando únicamente triángulos rectángulos y alcanzar dicha precisión. Aunque también podéis ver alguno de estos vídeos que os dejo, donde se explica el procedimiento.
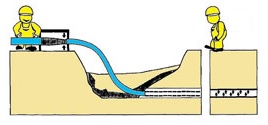
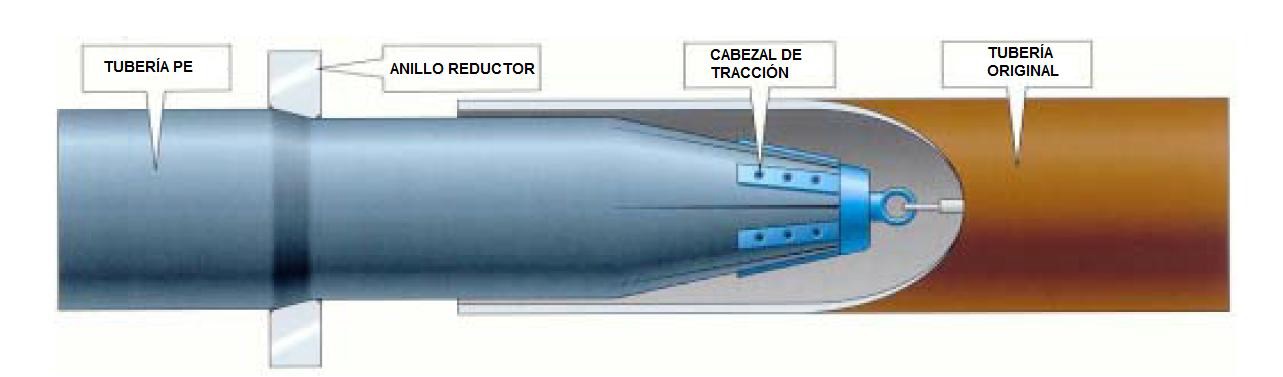
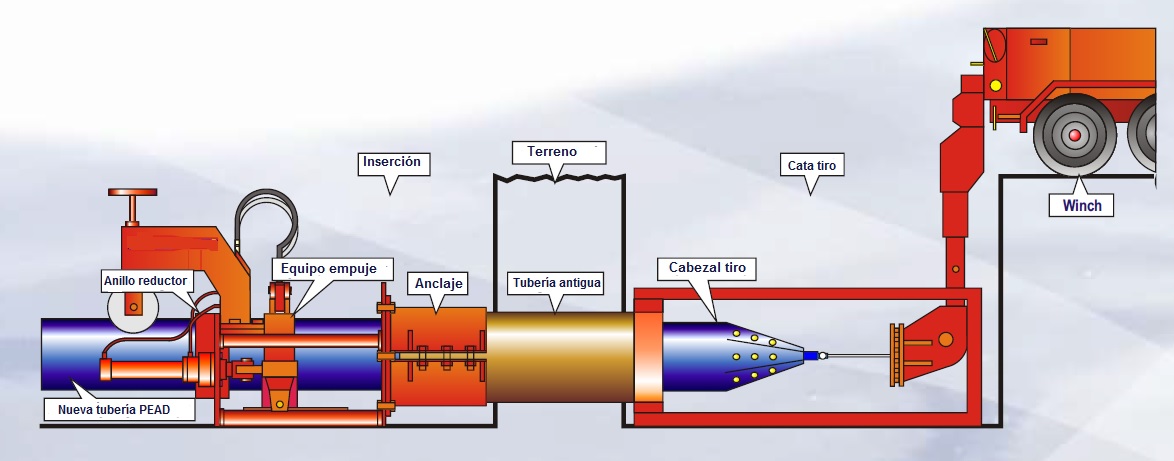
El sistema de entubado ajustado (Close-Fit) consiste en la renovación de tuberías de redes urbanas mediante tecnología sin zanja con una nueva tubería el polietileno de alta densidad (PEAD) con un diámetro exterior completamente ajustado a la tubería que se pretende renovar y sin necesidad de rellenar el espacio anular entre ambas. Esta técnica se desarrolló por British Gas a principios de los años 90. Se utiliza en agua potable, saneamiento, petróleo, gas, minería, industria, etc.
La nueva tubería tiene forma de U y reduce su sección un 40 %, por lo que resulta mucho más fácil de transportar e instalar. Es aplicable a tramos largos (típicamente de 500 m) o cortos (50 m en cruces de puentes), con un rango de aplicación de 100 a 1200 mm de diámetro. El nuevo tubo puede ser estructural, semiestructural o de revestimiento. Utiliza una tubería estándar de PEAD con un diámetro ligeramente mayor que el de la tubería antigua.
Para instalar la nueva tubería, se coloca un equipo de reducción al principio y un cabestrante de tiro en el punto final, deslizando el cable de tiro por toda la longitud. La nueva tubería se hace pasar por el aro de reducción, lo que genera una reducción de diámetro que permite instalarla dentro de la antigua. Una vez instalada la tubería, se retira la tracción del cabrestante y esta vuelve a su estado original, ajustándose completamente a la existente.
Os dejo a continuación un vídeo de la empresa Sinzatec. Espero que os guste.
Referencias:
UNE-EN ISO 11295:2011. Clasificación e información sobre el diseño de sistemas de canalización en materiales plásticos utilizados en la renovación. (ISO 11295:2010)
Se puede definir una obra de zanja en zona urbana como el conjunto de operaciones de obra civil necesarias para albergar y disponer canalizaciones de servicios públicos en suelo de dominio público.
La apertura de zanjas en medio urbano es, sin duda, una de las operaciones más habituales en este tipo de obras. Son obras de corta duración, de ámbito reducido y con frecuentes interferencias de todo tipo: otras canalizaciones, tráfico, etc. La sociedad urbana es cada vez más sensible a las molestias que suponen las zanjas en las ciudades, que generan colapsos circulatorios, ruido y suciedad. Estas zanjas sirven para todo tipo de canalizaciones: alcantarillado, agua potable, telecomunicaciones, electricidad y gas, entre otras muchas.
Se consideran zanjas superficiales las que presentan una profundidad inferior a 0,50 m respecto a la rasante del firme, y se consideran profundas las que superan los 1,00 m de profundidad. Aunque lo más habitual es la ejecución de zanjas intermedias.
Una buena alternativa al procedimiento convencional de apertura de zanjas es la tecnología sin zanjas o trenchless, pero cuya descripción se escapa al objeto de este post.
Aconsejo la lectura del artículo de Vicente Belenguer “Recomendaciones técnicas sobre ejecución de zanjas en ámbito urbano”, cuya lectura la podemos ver directamente del número 387 de la revista Cimbra. Os recomiendo encarecidamente su lectura.
Os paso a continuación algunos vídeos sobre este tipo de obras urbanas y sus molestias. En el primer vídeo podéis ver una zanjadora de disco con picas. En el segundo, una noticia sobre obras molestas.
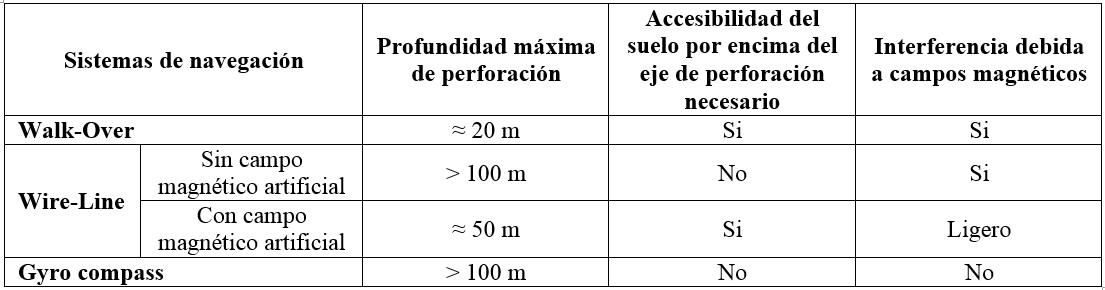
El desarrollo de la tecnología PHD se ha basado fundamentalmente en las innovaciones realizadas en los sistemas de navegación y seguimiento de la perforación. La navegación permite conocer con precisión la localización de la punta de perforación. Para controlar la dirección y profundidad de la cabeza, se le coloca en su interior o junto a ella una sonda que emite señales que se recogen en superficie. Este sistema vía radio se denomina “Walk-over”, que incluso es capaz de capturar las señales sin acceso directo sobre el transmisor; es un sistema muy utilizado en la PHD, sobre todo en trabajos pequeños y medianos.
Sin embargo, a veces resulta complicado seguir en superficie al transmisor, como por ejemplo en un río; en estos casos se puede utilizar un cable conectado a la cabeza para el guiado, sería el sistema de cable “Wire-line”, utilizado también cuando se requiere una mayor precisión. Existe asimismo la posibilidad de anular el efecto de campos magnéticos y eléctricos cuando se atraviesan elementos que interfieren las señales. Otros sistemas, denominados “Gyro compass”, utilizan la magnetometría para la localización; estos giroscopios trabajan independientemente del campo magnético terrestre y por tanto determinan de forma precisa la dirección del eje de perforación. Li (2013) explica la monitorización de una tubería de gas durante su ejecución.
Todos estos sistemas de navegación se encuentran asistidos por ordenador para el correcto control de la dirección. La tabla resume los diferentes procedimientos de navegación con detalles de los campos de utilización (IbSTT, 2013).
Tabla. Diferentes procedimientos de navegación de PHD (IbSTT, 2013).
Os dejo un vídeo explicativo que espero os sea de interés.
Referencias:
IbSTT Asociación Ibérica de Tecnología SIN Zanja (2013). Manual de Tecnologías Sin Zanja.
Li, S. (2013). Construction monitoring of a municipal gas pipeline during horizontal directional drilling. Journal of Pipeline Systems Engineering and Practice, Volume 4, No. 4, 04013005.
Yepes, V. (2014). Maquinaria para sondeos y perforaciones. Apuntes de la Universitat Politècnica de València, Ref. 209. Valencia, 89 pp.
Yepes, V. (2015). Aspectos generales de la perforación horizontal dirigida. Curso de Postgrado Especialista en Tecnologías Sin Zanja, Ref. M7-2, 10 pp.
Fluido de perforación. Imagen de Catalana de Perforacions
El procedimiento habitual es la perforación asistida con fluidos. En este caso, la cabeza se empuja por una sarta de perforación a través del terreno. El fluido se bombea por el interior de la tubería que forma la sarta de perforación y retorna por el espacio que existe entre la sarta y las paredes de la perforación, con el detritus correspondiente, por lo que debe reciclarse para volver a utilizarse. Hay máquinas autónomas que llevan consigo los tanques de mezcla y las bombas del fluido, aunque en otras son sistemas independientes.
El uso de la perforación con lodos es frecuente, pues además de contener las paredes, permite el transporte del detritus en suspensión al exterior, además de la lubricación y refrigeración de la cabeza de corte. Asimismo, estabilizan la perforación piloto hasta que se inicia su ensanche. Los fluidos de perforación suelen ser mezclas de bentonita y agua, aunque hoy existe una tendencia creciente en el uso de polímeros. Hay que prever en suelos porosos o fracturados una pérdida de fluidos significativa. Cuando se trata de perforar terrenos duros y roca, se pueden utilizar conjuntos de fondo, BHA (bottom hole assembly), que es la parte inferior de la sarta de perforación que se extiende desde un tricono de perforación al varillaje. El BHA se acciona mediante un motor de lodos, que utiliza la potencia hidráulica del fluido de perforación.
Central de tratamiento de lodos. Imagen de Catalana de Perforacions
En el vídeo que os dejo a continuación se profundiza en el uso de los lodos como fluido de perforación. Espero que os sea de utilidad.
Referencias:
IbSTT Asociación Ibérica de Tecnología SIN Zanja (2013). Manual de Tecnologías Sin Zanja.
Yepes, V. (2014). Maquinaria para sondeos y perforaciones. Apuntes de la Universitat Politècnica de València, Ref. 209. Valencia, 89 pp.
Yepes, V. (2015). Aspectos generales de la perforación horizontal dirigida. Curso de Postgrado Especialista en Tecnologías Sin Zanja, Ref. M7-2, 10 pp.
Figura 1. Perforación Horizontal Dirigida. http://www.construtec.es/
Actualmente existe una gran variedad de máquinas empleadas en la PHD. En la Tabla 1 se recoge una clasificación en función de la fuerza máxima de tiro, el par máximo y el peso (IbSTT, 2013). Más del 90% de las máquinas se pueden clasificar como pequeñas o medianas, con una fuerza máxima de tiro de 250 kN. Con estas características, se pueden colocar diámetros que oscilan entre los 50 mm y los 2200 mm, e incluso llegar a 3 km de conducción si se dan las circunstancias favorables. Aunque las máquinas estándar y más versátiles del mercado suelen tener 500 kN de tracción, las mayores tiran unos 2000 kN. Resulta interesante en este sentido el trabajo de Gierczak (2014) donde se realiza una valoración cualitativa de los riesgos inherentes a los proyectos PHD. Además, estas máquinas presentan una gran variedad de sistemas de guiado, cabezas de perforación, de ensanchamiento y otros accesorios (Figura 2).
Tabla 1. Clasificación de máquinas para la perforación horizontal dirigida (IbSTT, 2013)Figura 2. Mandriles de cabeza de tiro. Imagen de Terra Trenchless Technologies
Las pequeñas acometidas utilizan sistemas Mini-PHD (Figura 3) en las que la dirección de la cabeza de perforación se logra gracias al corte en bisel que presenta la propia broca. En los sistemas Maxi-PHD se utiliza una camisa doblada para desviar el eje del cabezal de corte, además de un tubo de lavado (“washover”) o una camisa con un gran diámetro interno, dentro de la que se desliza la sarta de perforación. A pesar de la gran variedad de máquinas y fabricantes, los equipos están montados sobre tráiler, sobre orugas o por módulos. El sistema modular suele ser la mejor opción para los equipos de mayor potencia, por su facilidad y rapidez de acoplamiento. Para obras de fácil acceso y para facilitar el transporte, lo mejor sería montar el equipo sobre un tráiler, pero si tenemos problemas de movilidad, mejor sería montarlo sobre orugas.
Figura 3. Mini-PHD para acometidas modelo GRUNDOPIT. Imágenes de Sistemas de Perforación S.L.U.
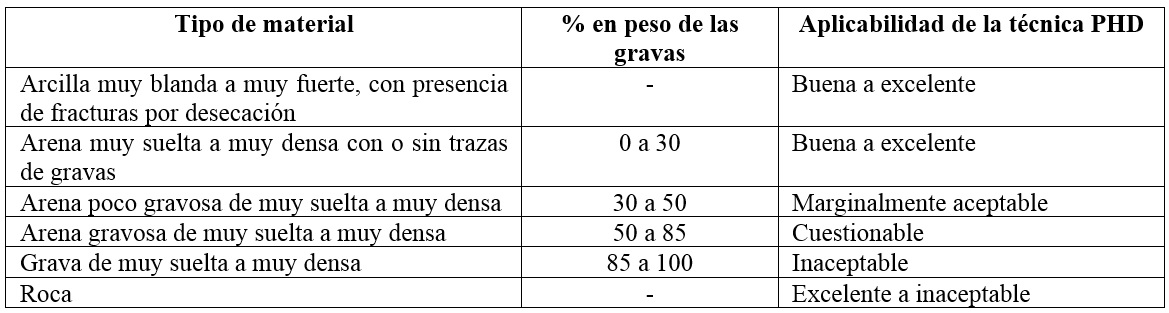
Los rendimientos de las máquinas PHD dependen del tipo de terreno (ver Tabla 2), pero también de aspectos gerenciales, medioambientales o de las condiciones de la tubería. Zayed y Mahmoud (2013) analizan todos los factores que influyen en la productividad. Predecir la producción y los costes que va a tener un equipo de estas características puede ser complejo (Yepes, 2015); en este sentido Zayed y Mahmoud (2014) proponen técnicas basadas en la lógica difusa para su predicción.
Tabla 2. Valoración de la aplicabilidad de la técnica PHD en función del material (Hair, 1994).
Así, lo más favorable son arcillas homogéneas, mientras que los materiales granulares presentan problemas de estabilidad, sobre todo bajo nivel freático. Además, las gravas pueden acelerar el desgaste de la cabeza de perforación. Wang y Sterling (2007) han estudiado el comportamiento de la PHD en arenas flojas o mezclas de arenas y gravas, que son los terrenos más problemáticos. En el caso de roca, las máquinas deben contar con motores de lodos que accionen las cabezas cortadoras. Existen incluso máquinas con doble varilla en el que el tubo interior hacer rotar la cabeza cortadora de roca y el exterior proporciona la dirección de perforación; sin embargo, estas máquinas son de pequeño diámetro y longitud de perforación. Otra opción es combinar la percusión con el empuje y la rotación.
En cuanto al emplazamiento de las máquinas, éstas se instalan en superficie, aunque en ocasiones se implantan en un foso. Las de superficie se desplazan mediante orugas, aunque si son muy grandes a veces se requieren medios de transporte. Con todo, son necesarios pequeñas excavaciones para conectar los extremos de los tramos de tubería. Las máquinas emplazadas en fosos se usan normalmente para tramos cortos y rectos, con ligeras desviaciones. Esta circunstancia también restringe la longitud de la sarta de perforación.
Las máquinas PHD presentan dos características comunes, un soporte que empuja la sarta de perforación para la perforación piloto y luego tira de ella y del tubo durante el ensanchamiento (Figura 4), y un motor que hace girar la sarta de perforación, junto con la cabeza de perforación o de ensanche. El empuje suele ser hidráulico, y la inclinación del soporte está inclinada entre 10º y 20º respecto a la horizontal. Si la máquina se emplaza en un foso, la reacción necesaria la proporcionan las caras de la excavación. Las máquinas de superficie se anclan al suelo para su estabilización.
Figura 4. Conexión del escariador a la tubería. Imagen de Apollo Trenchless, Inc.
La sarta de perforación está formada por tubos que están sometidos a grandes esfuerzos, tanto de tracción como de compresión por el empuje y tiro de la máquina, así como de torsión por el par de rotación. Además deben ser flexibles para adaptarse a los cambios de dirección de la perforación y ligeros para facilitar su transporte. Y por supuesto, resistentes a la abrasión y al desgaste. Cheng y Polak (2007) presentan un modelo teórico para el dimensionamiento de las tuberías y Yang et al. (2014) proporcionan un modelo dinámico determinar los esfuerzos de tiro. Las máquinas emplazadas en superficie usan tubos de entre 3 y 9,6 m de longitud, mientras que las situadas en un foso requieren tramos más cortos, entre 0,3 y 1, 5 m. Estos tramos suelen roscarse entre sí, aunque también hay conexiones tipo bayoneta. La tubería se incorpora a la perforación por tramos cargándose por un sistema automático de la máquina (Figura 5). Los tramos se pueden roscar o desenroscar de forma automática para acelerar la producción y seguridad de las operaciones.
Figura 5. Sistema de carga de tramos de tubería. Imagen de Zemin Arastrima Merkezi, Corp.
A continuación os dejo un vídeo explicativo que espero sea de vuestro interés.
Referencias:
Cheng, E., and Polak, M. A. (2007). Theoretical model for calculating pulling loads for pipes in horizontal directional drilling. Tunnelling and Underground Space Technology, Volume 22, No. 5-6, pp. 633-643.
Gierczak, M. (2014). The qualitative risk assessment of mini, midi and maxi horizontal directional drilling projects. Tunnelling and Underground Space Technology, Volume 44, pp. 148-156.
IbSTT Asociación Ibérica de Tecnología SIN Zanja (2013). Manual de Tecnologías Sin Zanja.
Wang, X., and Sterling, R. L. (2007). Stability analysis of a borehole wall during horizontal directional drilling. Tunnelling and Underground Space Technology, Volume 22, No. 5-6, pp. 620-632.
Yang, C. J., Zhu, W. D., Zhang, W. H., Zhu, X. H., and Ren, G. X. (2014). Determination of pipe pullback loads in horizontal directional drilling using an advanced computational dynamic model. Journal of engineering mechanics, Volume 140, No. 8, 04014060.
Yepes, V. (2014). Maquinaria para sondeos y perforaciones. Apuntes de la Universitat Politècnica de València, Ref. 209. Valencia, 89 pp.
Yepes, V. (2015). Coste, producción y mantenimiento de maquinaria para construcción. Editorial Universitat Politècnica de València, 155 pp.
Yepes, V. (2015). Aspectos generales de la perforación horizontal dirigida. Curso de Postgrado Especialista en Tecnologías Sin Zanja, Ref. M7-2, 10 pp.
Zayed, T., and Mahmoud, M. (2013). Data acquisition and factors impacting productivity of horizontal directional drilling (HDD). Tunnelling and Underground Space Technology, Volume 33, pp. 63-72.
Zayed, T., and Mahmoud, M. (2014). Neurofuzzy-based productivity prediction model for horizontal directional drilling. Journal of Pipeline Systems Engineering and Practice, Volume 5, No. 3, 04014004.
Figura. Fases en la ejecución de una PHD. Fuente: http://tracksonhorizontaldrilling.com.au/directional-drilling-presents-top-solution/
La instalación propiamente dicha de las tuberías o los conductos se realiza en varias fases. Primero se perfora un taladro piloto; a continuación se ensancha dicha perforación de forma concéntrica en sentido contrario al de la perforación piloto. En ese momento la máquina tira y la tubería se engancha al escariador para alojarla en su posición definitiva.
La perforación piloto constituye la siguiente fase del proceso tras los estudios previos y el emplazamiento de la maquinaria. Se trata de perforar con un cabezal direccionable con un varillaje especial que admite cambios de orientación. Su diámetro dependerá de la maquinaria utilizada y está relacionada con el tamaño de las barras de perforación y de las brocas de perforación. Los aspectos más relevantes a considerar son las posibles obstrucciones y los radios de curvaturas. Un sistema de navegación guía la cabeza de perforación. Lo habitual es que el varillaje permita la entrada de lodos, que pueden inyectarse a presión para mejorar la perforación. Los lodos arrastran el detritus hacia el exterior. En el caso de terrenos duros se puede utilizar un motor de lodos (mud-motor) que acciona el cabezal de perforación.
Tras la perforación piloto se realiza la operación de ensanche, normalmente en sentido inverso, tirando de un escariador. El agrandamiento puede hacerse de una vez o en fases sucesivas hasta alcanzar el diámetro necesario. Es habitual que el diámetro final sea el doble del de la tubería a instalar. Un aspecto clave es el terreno y su estabilidad, pues va a condicionar el uso del ensanchador. Así, en terrenos blandos se emplean ensanchadores tipo flycutter o barriles, mientras que en terrenos duros o roca se necesitan ensanchadores especiales con protecciones de carburo de tunsgteno. Existen escariadores cortadores, que corta trozos pequeños de material que se mezclan con el fluido de perforación; el escariador compactador, donde los recortes se compactan; y los mixtos, donde los recortes se compactan y se mueven.
Figura. Cabeza de perforación. Imágen de Catalana de PerforacionsFigura. Escariador. Imagen de Catalana de Perforacions
Por último, la tubería se alinea y se fija justo detrás del ensanchador y se introduce, de una sola vez, en el interior de la perforación tirando de ella. Para facilitar la operación los lodos lubrican las paredes de la perforación para reducir el rozamiento. Cuando se recoge el varillaje, la instalación ya está terminada.
Las recomendaciones generales para la ejecución de PHD pasarían por normalizar los métodos de trabajos para aumentar rendimientos y reducir costes, establecer sistemas de control que garanticen la seguridad y la calidad de los trabajos y establecer un sistema capaz de rechazar, corregir o aceptar las desviaciones que se puedan dar.
A continuación os dejo un vídeo explicativo al respecto del procedimiento constructivo del PHD.
Referencias:
IbSTT Asociación Ibérica de Tecnología SIN Zanja (2013). Manual de Tecnologías Sin Zanja.
Yepes, V. (2014). Maquinaria para sondeos y perforaciones. Apuntes de la Universitat Politècnica de València, Ref. 209. Valencia, 89 pp.
Yepes, V. (2015). Aspectos generales de la perforación horizontal dirigida. Curso de Postgrado Especialista en Tecnologías Sin Zanja, Ref. M7-2, 10 pp.