La sujeción de fachadas mediante apeos se realiza en aquellas ocasiones en que se desea conservar la fachada de un edificio, ya sea por su interés arquitectónico o por el valor que esta imprime al espacio público que delimita, mientras este se demuele y se reconstruye una nueva estructura que la sustente. El diseño, el cálculo y la ejecución del apeo se realizarán para mantener la fachada “colgada” en su posición original, garantizando su estabilidad y evitando su desplome por acciones horizontales durante la demolición del edificio y hasta que la fachada esté correctamente unida a la nueva estructura.
Figura 1. Análisis de los elementos sobre los que actuará el apeo
Os dejo un breve vídeo en el que se explica este procedimiento constructivo de forma sencilla. Espero que os guste.
Las nuevas tecnologías han facilitado la labor docente en la asignatura de “Procedimientos de construcción”. Aún recuerdo cuando, en los años 80, nuestro profesor Hermelando Corbí nos enseñaba catálogos de máquinas y, con un proyector de opacos, intentaba explicarnos el funcionamiento de algún medio auxiliar. Era una tarea algo complicada, ya que se trataba de explicar la obra en las cuatro paredes del aula. El PowerPoint, los vídeos o las animaciones en 3D han provocado que tiráramos a la basura kilos de transparencias que, hasta hace apenas 10 años, utilizábamos habitualmente para exponer en nuestras clases.
Hoy en día, las nuevas tecnologías pueden llevar las obras no solo a clase, sino también a casa de cada uno de nuestros futuros ingenieros. Como ejemplo, quería mostraros un vídeo sobre el proceso de trepa de una grúa torre, que es difícil de explicar en la pizarra o con transparencias.
La grúa torre trepadora es un medio auxiliar para el izado de cargas que se instala sobre la estructura de una obra en construcción y se desplaza de abajo hacia arriba por sus propios medios a medida que avanza la obra. Os paso un par de vídeos que espero que os gusten, y también la referencia del libro de apuntes que usamos en clase.
Referencias:
YEPES, V.; MARTÍ, J.V. (2017). Máquinas, cables y grúas empleados en la construcción. Editorial de la Universitat Politècnica de València. Ref. 814. Valencia, 210 pp.
Figura 1. Suelo mejorado con cemento. https://www.360enconcreto.com/blog/detalle/caracteristicas-del-suelo-cemento-que-y-para-que
No siempre es posible encontrar el suelo adecuado que garantice la estabilidad y durabilidad de una explanada. Si a esto se suma la creciente importancia medioambiental y la presión social por minimizar la apertura de nuevos préstamos y vertederos necesarios para el movimiento de tierras de una infraestructura, queda claro que hay que hacer un esfuerzo para utilizar materiales calificados como tolerables, marginales e incluso inadecuados. La estabilización permite reemplazar un suelo de baja calidad por otro estabilizado y mejorado. Se trata de una de las técnicas más antiguas y utilizadas en bases y subbases para uso vial. No obstante, el espesor de la capa de suelo a tratar es relativamente pequeño, por lo que algunos autores no la consideran una técnica de mejora de terrenos.
La estabilización de un suelo mejora o controla su estabilidad volumétrica, aumenta su resistencia y su módulo esfuerzo-deformación, mejora su permeabilidad y durabilidad, y reduce su susceptibilidad al agua. Para evaluar el rendimiento de esta técnica, se requieren ensayos tanto de laboratorio como de campo. De este modo, se aprovechan los suelos de baja calidad, se evita su extracción y transporte a vertedero, aumenta su resistencia a la erosión, a las heladas y a otros agentes climáticos, se puede circular por terrenos impracticables y se obtiene una plataforma estable de apoyo del firme de infraestructuras lineales que colabore estructuralmente con este.
Figura 2. Maquinaria para la estabilización de suelos. Fuente: M. López-Bachiller
La compactación y el drenaje del agua son los métodos más sencillos de estabilización. También es posible mezclar dos o más suelos para obtener uno con mejor granulometría, plasticidad o grado de permeabilidad. Además, se puede lograr mediante aditivos que actúan física o químicamente sobre las propiedades del suelo. Los más utilizados son el cemento y la cal, pero también se emplean cenizas volantes, escorias granuladas, puzolanas, ligantes hidrocarbonados fluidos, cloruro cálcico, cloruro potásico, etc. Por tanto, la estabilización puede ser mecánica o química.
La estabilización mecánica se emplea en las explanadas de carreteras mediante compactación o mediante la mezcla del suelo existente con otro de aportación. Por ejemplo, en presencia de un suelo granular sin finos se agregaría otro con finos y cierta plasticidad para conseguir una mezcla de mayor cohesión, más fácil de compactar y menos permeable.
El tipo de suelo, el porcentaje de aditivo y la ejecución de la mezcla influyen en el grado de estabilización química. Se denominan suelos mejorados cuando se añaden pequeñas cantidades de un aditivo para mejorar ligeramente el suelo. No obstante, ciertos suelos de buena granulometría y baja plasticidad mejoran considerablemente con porcentajes mínimos de aditivo.
La estabilización química puede realizarse “in situ” o bien en central. Asimismo, en función de la profundidad del tratamiento, la estabilización puede considerarse un método de mezcla profunda (“deep mixing method”) o una estabilización en masa (“mass stabilization”). La mezcla profunda de suelos podría clasificarse también como una técnica de mejora por inclusiones rígidas. También podrían incluirse aquí las mezclas de suelos realizadas mediante inyecciones o mediante jet grouting. Igualmente es posible dividir la estabilización de suelos en técnicas de mezcla húmeda (“wet soil mixing”), por ejemplo, en el caso de lechadas de cemento, y mezcla seca (“dry soil mixing”), como es el caso de las mezclas con cal y cemento.
El sistema de lanzamiento consiste en el desplazamiento horizontal de secciones prefabricadas (vigas o dovelas) de un puente. Para ello, se utiliza una viga lanzadora que cubre la distancia entre un estribo y la pila más próxima o entre dos pilas sucesivas. A través de esta lanzadora se desplazan los elementos hasta que se colocan en su posición definitiva.
A continuación os paso un vídeo de la construcción del Viaducto en Egea (Huesca), en el que podremos ver el primer tablero hiperestático prefabricado con un vano mayor de 60 m, montado con lanzavigas. Supone un hito mundial en el ámbito de la construcción. Destacan los más de 50 m de altura de los pilones y una longitud superior a 153 m.
También os paso un reportaje de Aragón TV sobre el mismo tema:
Figura 1. Compactación dinámica. https://civildigital.com/ground-improvement-techniques-complete-list-of-methods-classifications/
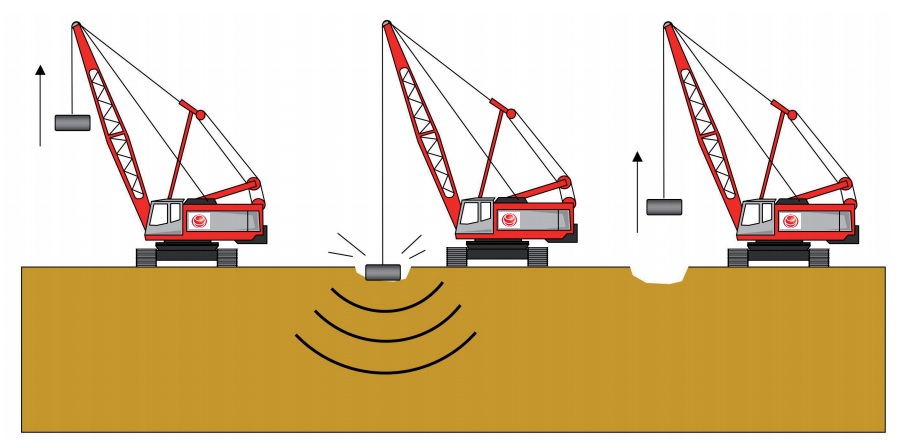
La compactación dinámica (“dynamic compaction”, DC) es una técnica que mejora la capacidad portante de los suelos al dejar caer una masa desde cierta altura. El nombre de compactación dinámica no refleja con exactitud los procesos reales de carga y transmisión de energía, por lo que también suele llamarse compactación dinámica profunda (“deep dynamic compaction”). Uno de los mitos de la compactación dinámica es que se trata de un tratamiento superficial del suelo, ya que las cargas se aplican en la superficie. Sin embargo, a diferencia de la compactación superficial, es un proceso de densificación que alcanza profundidades de entre 3 y 4 metros. Tras el impacto, se crean cráteres de hasta dos metros de profundidad, que deben rellenarse y compactarse. La densificación en profundidad se produce como resultado de la energía de las ondas dinámicas transmitida a través del suelo. Este tratamiento se aplica en edificios industriales, plataformas portuarias y aeroportuarias, terraplenes viarios y ferroviarios, entre otros. Además, es idóneo para obras extensas, con rendimientos superiores a 10000 m² al mes.
La técnica de dejar caer grandes masas sobre la superficie del suelo para mejorarla en profundidad se emplea desde hace tiempo. Menard y Broise (1976) se refieren a dibujos muy antiguos que sugieren que esta técnica se utilizaba en China desde hacía siglos. Los romanos también la emplearon en sus construcciones antes del año 100 a. C. En Estados Unidos se empleó un antiguo cañón para compactar ya en 1871 (Lundwall, 1968). En la antigua Unión Soviética también se compactó el loess con buenos resultados, si bien con pesos y alturas de caída mucho menores que en la actualidad (Faraco, 1980). En los años cuarenta, este procedimiento constructivo se empleó en la construcción de un aeropuerto en China y de un área portuaria en Dublín. Sin embargo, la técnica actual puede fecharse en 1970, cuando Louis Menard patentó este método en Francia, favorecido, sin duda, por la aparición de las gigantescas grúas montadas sobre orugas. En Gran Bretaña y en Estados Unidos se empezó a utilizar en 1973 y 1975, respectivamente.
Hoy en día, es habitual el uso de pesos que oscilan entre 1 y 30 t, con alturas de caída de entre 10 y 30 m, a veces más. Los pesos están hechos de acero para soportar cargas dinámicas repetitivas. Normalmente, se utiliza una grúa para dejar caer el peso, aunque también existen equipos especiales. Las grúas deben permanecer en buenas condiciones, ya que no están diseñadas para soportar cargas dinámicas repetitivas.
Figura 2. Esquema de la ejecución de la compactación dinámica. Cortesía de Menard
Este tipo de tratamiento depende de las características del suelo y de la energía empleada. En principio, puede utilizarse en suelos granulares, tanto saturados como no saturados. También ofrece buenos resultados en rellenos artificiales heterogéneos, que difícilmente se mejorarían con otros procedimientos. La mejora se traduce en un aumento de la capacidad portante y en una reducción de los asientos, incluidos los diferenciales. Es un método muy utilizado para prevenir la licuefacción de los suelos. La compactación dinámica permite incluso cimentar con zapatas convencionales, ya que proporciona una capacidad portante del suelo entre 100 y 150 kPa. Además, es una solución económica en comparación con la excavación y la sustitución del suelo, la precarga o las inyecciones. Los costes son aproximadamente 2/3 de los de las columnas de grava, con un ahorro de hasta el 50 % en comparación con la compactación profunda. Se pueden obtener rendimientos de 300 a 600 m²/día (García Valcarce et al., 2003).
La compactación dinámica se utiliza para densificar suelos flojos, saturados y sin cohesión, lo que reduce el riesgo de licuefacción del terreno. En este sentido, el proceso de densificación es similar al de la vibrocompactación. Es una de las mejores alternativas para densificar rellenos heterogéneos y escombros, que podrían causar problemas a otras técnicas como las columnas de grava o las inclusiones rígidas. También podría emplearse en suelos finos cohesivos, pero el éxito en este caso es más dudoso y es necesario prestar atención a la generación y disipación de las presiones intersticiales. En ocasiones, esta técnica se emplea conjuntamente con las columnas de grava para facilitar la disipación de las presiones intersticiales (Bayuk y Walker, 1994).
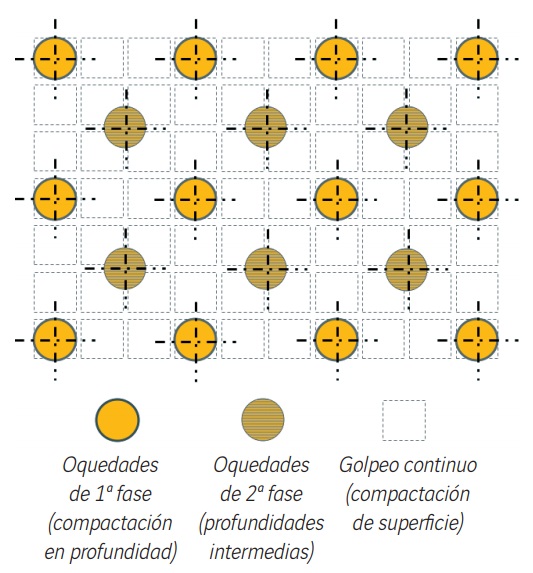
Los patrones de caída suelen consistir en cuadrículas primarias y secundarias (y, ocasionalmente, terciarias), como las que se muestran en la Figura 3. El espaciamiento entre puntos de impacto oscila entre 2 y 3 m en el caso de las mazas pequeñas y supera los 10 m en el de las mazas pesadas. Una vez que la profundidad del cráter alcanza aproximadamente 1 m, se rellena con material granular antes de realizar nuevas caídas en ese lugar.
Figura 3. Fases en la compactación dinámica. Cortesía de Menard
El tratamiento se da en varias pasadas y la profundidad alcanzada por la densificación se puede relacionar con la energía del golpe mediante la siguiente fórmula empírica (Mayne et al., 1984):
donde:
M = masa de la maza (toneladas)
H = altura de caída (metros)
D = profundidad efectiva de la compactación (metros)
k = factor empírico que depende del tipo de suelo y de las características del tratamiento, y varía entre 0,35 (arenas limosas y limos con IP=10%) y 0,6 (gravas y arenas limpias), aunque un valor habitual puede ser 0,5.
Teniendo en cuenta lo anterior, y conociendo las capacidades máximas de las grúas normalmente disponibles (H=30 m, M=20 t), la profundidad efectiva máxima varía entre 7 y 12 m, aproximadamente (Armijo y Blanco, 2017). No obstante, se pueden alcanzar profundidades de tratamiento de hasta 30 m (García Valcarce et al., 2003).
Durante la compactación, existe un efecto instantáneo al reducirse el índice de huecos tras el impacto y un efecto diferido en suelos saturados, al disiparse la sobrepresión intersticial y al reestructurarse el material en un estado más denso.
Con todo, la compactación dinámica presenta algunos inconvenientes. En efecto, se necesita una superficie mínima de 15000 m² para garantizar cierta rentabilidad económica y, además, se debe dejar una distancia mínima de 20 a 30 m a las estructuras próximas para evitar daños (García Valcarce et al., 2003).
El procedimiento de compactación dinámica está ampliamente descrito en el trabajo de Liausu (1984).
He grabado un breve vídeo explicativo sobre esta técnica de mejora de terrenos.
A continuación tenéis un folleto explicativo de Menard.
Bayuk, A.A.; Walker, A.D. (1994). «Dynamic Compaction. Two Case Histories Utilizing Innovative Techniques.» In-Situ Deep Soil Improvement, ASCE, Geotechnical Special Publication No.45.
Faraco, C. (1980). “Mejora del terreno de cimentación”, en Jiménez Salas (coord.) Geotecnia y Cimientos III, primera parte, pp. 489-531.
Findlay, J.D.; Sherwood, D.E. (1986).”Improvement of a hydraulic fill site in Bahrain using modified heavy tamping methods” Building on Marginal & Derelict Land., May 7-9.
García Valcarce, A. (dir.) (2003). Manual de edificación: mecánica de los terrenos y cimientos. CIE Inversiones Editoriales Dossat-2000 S.L. Madrid, 716 pp.
Liausu, P. (1984) Renforcement de Couches de Sol Compressibles par Substitution Dynamique, In-Situ Soil and Rock Reinforcement Conference, Paris.
Lundwall, N.B. (1968). The Saint George Temple, in “Temples of the Most High, Bookcraft, Salt Lake City, Chapter 3, p. 78.
Mayne, P.W.; Jones, J.S.; Dumas, J.C. (1984). Ground response to dynamic compaction. Journal of Geotechnical Engineering, ASCE, Vol. 110(6), pp. 757-774.
Ministerio de Fomento (2002). Guía de Cimentaciones. Dirección General de Carreteras.
Menard, L.; Broise Y. (1976). “Theoretical and practical aspects of dynamic consolidation”, Ground Treatment by deep compaction, Institution of Civil Engineers, LONDON, pp. 3-18.
Skempton, A.W. (1986). Standard Penetration Test Procedures and the Effects in Sand of Overburden Pressure, Relative Density, Particle Size, Ageing and Overconsolidation. Geotechnique, 36, pp. 425-437.
Uto, K.; Fuyuki, M. (1981). “Present and Future Trend on Penetration Testing in Japan”, Japanese Soc. SMFE.
Varaksin, S. (1981). “Recent development in soil improvement techniques and their practical applications”. Sol. Soils, N.º 38/39.
La perforación con martillo en fondo (D.T.H. down the hole), desarrollada por Stenuick en 1951, consiste en que un martillo golpea directamente la boca en el fondo de la perforación. De esta forma se evita la pérdida de energía transmitida por la percusión del pistón a través del varillaje (a partir de 15-20 m, los martillos en cabeza dejan de ser efectivos). Hoy en día se pueden alcanzar profundidades superiores a los 100 m con rendimientos de entre 60 y 100 m/turno. El martillo en el fondo y la boca forman una unidad dentro del barreno. Esto garantiza una velocidad de perforación bastante homogénea a medida que aumenta la profundidad del taladro, aunque es normal que disminuya debido a la reducción de la velocidad de barrido con la profundidad. El accionamiento del pistón se realiza neumáticamente, mientras que la rotación puede ser neumática o hidráulica.
El martillo DTH consta de un cilindro cuya longitud es función de la carrera del pistón y cuyo diámetro es acorde con el diámetro de perforación. En el extremo de este cilindro se encuentra la boca de perforación, alojada en un portabocas. El varillaje se sustituye por un tubo hueco que conecta el martillo con el equipo y transmite el par de rotación y la fuerza de avance. Los barrenos perforados con martillo en el fondo presentan desviaciones mínimas y ofrecen buenos resultados en rocas muy fracturadas. El varillaje, compuesto por tubos de igual diámetro a lo largo de toda su longitud, no tiene acoplamientos que puedan obstruir la perforación. La rotación la realiza un motor neumático o hidráulico montado en el carro, al igual que el sistema de avance. El aire de escape elimina los detritos y los transporta fuera.
El campo de aplicación del martillo DTH es para rocas con una resistencia a la compresión media-alta (60-100 MPa), para las cuales se utilizan diámetros entre 85 y 200 mm, aunque podrían ampliarse a diámetros mayores, entrando en competencia con los sistemas rotopercutivos hidráulicos con martillo en cabeza. La velocidad de penetración de estos martillos, para diámetros de 105 a 165 mm, es de 0,5 a 0,6 m/min, a presiones de trabajo de 1800 a 2000 kPa. La frecuencia de golpeo oscila entre 600 y 1600 golpes por minuto. En cuanto al empuje, se requieren unos 85 kg por cada cm de diámetro. Para hacerse una idea, con diámetros de 125 mm podemos obtener el doble de potencia que con un diámetro de 100 mm, a igualdad de presión y de carrera del pistón.
Hoy en día, el sistema DTH, en el rango de 76 a 125 mm, está siendo sustituido por la perforación con martillo hidráulico de cabeza.Las ventajas de la perforación con martillo DTH frente a otros sistemas son las siguientes:
Velocidad de penetración prácticamente constante con el aumento de la profundidad de perforación
Salvo en rocas muy abrasivas, desgastes de las bocas menores que con martillo en cabeza
Vida más larga de los tubos que de las varillas y manguitos de los martillos en cabeza
Desviaciones pequeñas de los barrenos, por lo que son adecuados para profundidades largas
Menor energía de impacto y más frecuencia, lo cual es apto para macizos muy fracturados o desfavorables
Par y velocidad de rotación menor que otros métodos
No necesitan barras de carga, lo cual permite pequeños carros de perforación para barrenos de gran diámetro y profundidad
Menor coste por metro lineal que con perforación rotativa en diámetros grandes y rocas muy duras
Consumo de aire comprimido más bajo que con martillo en cabeza neumático
Nivel de ruido inferior al estar el martillo dentro de la perforación.
En cuanto a los inconvenientes de este sistema:
Velocidades de penetración bajas
Cada martillo está diseñado para una gama de diámetros muy estrecha que oscila en unos 12 mm
El diámetro más pequeño está limitado por las dimensiones del martillo para un rendimiento aceptable (unos 76 mm)
El costo de un martillo de fondo es muy elevado frente a la pequeña inversión de un tren de varillaje
Riesgo de pérdida del martillo en el interior de la perforación
Se necesitan compresores de alta presión con altos consumos de energía.
A continuación, os dejo algunos vídeos de este sistema de perforación. En el primero os dejo un Polimedia que espero que os sea útil.
En el siguiente vemos una máquina perforadora neumática Stenuick modelo MD25-60 con motor de rotación Stenuick mod F574, martillo del fondo de 2″, broca de carburo de tungsteno de 2 ¾ » y 3″ y tubos de perforación de 60 mm de diámetro por 2 m.
En este se observa una perforación de anclajes con martillo de fondo para la estabilización de un talud en roca de basalto meteorizada.
En este otro se puede ver una perforación con DTH a través de estructuras geotécnicas para la ejecución de inyecciones de contacto en una estructura subterránea.
[politube2]65113:450:358[/politube2]
Referencias:
DIRECCIÓN GENERAL DE CARRETERAS (1998). Manual para el control y diseño de voladuras en obras de carreteras. Ministerio de Fomento, Madrid, 390 pp.
INSTITUTO TECNOLÓGICO GEOMINERO DE ESPAÑA (1994). Manual de perforación y voladura de rocas. Serie Tecnológica y Seguridad Minera, 2ª Edición, Madrid, 541 pp.
MARTÍ, J.V.; YEPES, V.; GONZÁLEZ, F.; ALCALÁ, J. (2012). Técnicas de voladuras y excavación en túneles. Editorial de la Universitat Politècnica de València. Ref. 530, 165 pp.
UNIÓN ESPAÑOLA DE EXPLOSIVOS (1990). Manual de perforación. Rio Blast, S.A., Madrid, 206 pp.
YEPES, V. (2014). Maquinaria para sondeos y perforaciones. Apuntes de la Universitat Politècnica de València, Ref. 209.
La forma habitual de perforación de una roca a rotopercusión es la perforación con martillo en cabeza. El principio de corte se basa en el impacto ejercido en el exterior de la perforación por un pistón de acero sobre una barrena o varillaje, que a su vez transmite la energía al fondo del taladro mediante el elemento final (la boca), que fragmenta la roca en esquirlas. Para asegurar una sección circular en el barreno, el útil gira con cada golpe para presentar nueva roca virgen en el fondo del barreno. Además, es preciso evacuar los detritos del barreno (barrido), lo cual se consigue insuflando aire al fondo del taladro. Parte de la energía del impacto se pierde en la transmisión y en los cambios de sección del varillaje, por lo que la velocidad de penetración de la perforación disminuirá a medida que se profundice en el barreno. Es un sistema que conceptualmente es similar al barrenado manual, donde un operario golpea con una maza la cabeza de una barrena.
Se pueden distinguir los martillos manuales de las perforadoras de martillo en cabeza propiamente dichas. Los primeros son equipos sencillos, actualmente en desuso, salvo en demoliciones o perforaciones de pequeña sección no mecanizable. Los segundos son equipos pesados que, en consecuencia, requieren su montaje en chasis especiales.
Las perforadoras con martillo en cabeza pueden accionarse mediante martillos neumáticos o hidráulicos. El desarrollo de los martillos hidráulicos en los años sesenta y comienzos de los setenta supuso un gran avance tecnológico en la perforación de rocas.
Tanto las perforadoras neumáticas como las hidráulicas constan de los siguientes elementos:
Un cilindro que con su movimiento alternativo golpea el extremo de una barrena
Un mecanismo de rotación incorporado al pistón (barra rifle o rueda trinquete) o independiente de este (motor de rotación)
Un sistema que permite el barrido del barreno mediante una aguja de barrido que atraviesa el pistón o bien por medio de la inyección del fluido de barrido lateralmente en la cabeza frontal de la perforadora
Perforadoras neumáticas
El accionamiento de estas perforadoras se realiza mediante aire comprimido, con la misma presión tanto para el mecanismo de impacto como para el aire de barrido. Son perforadoras empleadas tradicionalmente para barrenos de menos de 150 mm de diámetro. Su peso y tamaño son menores que los de las perforadoras hidráulicas. Presentan un consumo de aire de unos 2,1-2,8 m³/min por cada centímetro de diámetro, la velocidad de rotación es de 40-400 rpm y la carrera del pistón de 35-95 mm.
La rotación del varillaje puede realizarse mediante:
Barra estriada o rueda de trinquete: muy generalizado en perforadoras ligeras
Motor independiente: barrenos de gran diámetro
Las longitudes de perforación con este sistema no superan habitualmente los 30 m debido a las importantes pérdidas de energía ocasionadas por la transmisión de la onda de choque y por las desviaciones de los barrenos. Lo normal es utilizar barrenos cortos, con longitudes de entre 2 y 15 m y diámetros pequeños, de entre 38 y 100 mm. Además, a medida que aumenta la longitud del barreno, se requiere una mayor presión de aire de barrido.
Entre las ventajas de las perforadoras neumáticas cabe destacar las siguientes:
Gran simplicidad
Fiabilidad y bajo mantenimiento
Facilidad de reparación
Precios de adquisición bajos
Perforadoras hidráulicas
Estos equipos se introdujeron inicialmente en los trabajos subterráneos, pero poco a poco se están imponiendo también en la perforación en superficie. Estructuralmente, la perforadora hidráulica es similar a la neumática, aunque el accionamiento se realiza mediante un grupo de bombas que suministran un caudal de aceite que impulsa los componentes. Además, estas unidades van equipadas con un compresor cuya función es suministrar aire para barrer los escombros y se puede incrementar la presión del aire con la profundidad del barreno. La presión de trabajo de estos equipos oscila entre 7,5 y 25 MPa, la potencia de impacto entre 6 y 20 kW y la velocidad de rotación entre 0 y 500 rpm. Aquí el consumo relativo de aire comprimido es menor, entre 0,6 y 0,9 m³/min por cada centímetro de diámetro.
Respecto a las perforadoras neumáticas, necesitan una mayor inversión inicial, requieren reparaciones más complejas y costosas y necesitan una mejor organización y formación del personal de mantenimiento. En cambio, las ventajas tecnológicas de las perforadoras hidráulicas son las siguientes:
Menor consumo de energía: tres veces menos
Menor coste de accesorios de perforación: incremento del 20% de la vida útil del varillaje
Mayor capacidad de perforación: velocidades de penetración entre un 50 y un 100% mayores
Mejores condiciones ambientales: más limpios y silenciosos
Mayor elasticidad en la operación: posibilidad de variar la presión de accionamiento, la energía y la frecuencia de golpeo
Mayor facilidad para la automatización: cambio de varillaje, mecanismos antiatranque, etc.
Carro para martillo en fondo semihidráulico AirROC D45 (Atlas Copco)
Os dejo un Polimedia explicativo sobre este sistema de perforación que espero os resulte útil.
Referencias:
DIRECCIÓN GENERAL DE CARRETERAS (1998). Manual para el control y diseño de voladuras en obras de carreteras. Ministerio de Fomento, Madrid, 390 pp.
INSTITUTO TECNOLÓGICO GEOMINERO DE ESPAÑA (1994). Manual de perforación y voladura de rocas. Serie Tecnológica y Seguridad Minera, 2ª Edición, Madrid, 541 pp.
MARTÍ, J.V.; YEPES, V.; GONZÁLEZ, F.; ALCALÁ, J. (2012). Técnicas de voladuras y excavación en túneles. Editorial de la Universitat Politècnica de València. Ref. 530, 165 pp.
UNIÓN ESPAÑOLA DE EXPLOSIVOS (1990). Manual de perforación. Rio Blast, S.A., Madrid, 206 pp.
YEPES, V. (2022). Maquinaria para sondeos, movimientos de tierras y construcción de firmes. Apuntes de la Universitat Politècnica de València, Ref. 22.
Tricono de insertos. https://www.talleresegovia.com
El trépano es la herramienta de corte ubicada en el extremo inferior de la sarta de perforación, utilizada para cortar o triturar la formación durante la perforación rotatoria. Actualmente, los trépanos más utilizados son los trépanos triturantes o trépanostriconos.
Esta herramienta se creó en 1910, pero no fue hasta que se perfeccionaron los equipos de rotación en la década de los sesenta que su uso se popularizó. Al principio, este tipo de perforación se utilizaba solo en rocas blandas o de baja resistencia, pero actualmente estos sistemas ya son competitivos frente a las rocas duras. Con este sistema de perforación se alcanzan buenos rendimientos, de 60 a 100 m por turno, a profundidades de hasta 200 m. Se utiliza en ingeniería civil con diámetros de entre 100 y 300 mm. Sin embargo, estos límites se superan en perforaciones petrolíferas, donde en España se han alcanzado 4500 m de profundidad.
El principio de perforación se basa en dos acciones combinadas:
Indentación: Los dientes o insertos penetran en la roca debido al empuje ejercido sobre la boca. Este mecanismo tritura la roca.
Corte: La roca se fragmenta debido al movimiento lateral de desgarre de los conos al girar sobre el fondo del barreno.
La fuerza de avance se produce al introducir los botones del tricono en la roca. Este empuje se transmite al varillaje mediante una cadena de accionamiento hidráulico. La magnitud del empuje no debe superar un umbral para evitar que el trépano se agarrote a la roca y se produzcan otros fallos. La limpieza de la perforación se realiza inyectando un fluido, generalmente lodo, aunque en ocasiones se usa agua o aire comprimido, por el interior de la columna de barras hacia el fondo del barreno. Este caudal, además de barrer el detritus, permite refrigerar y lubricar los rodamientos del tricono.
La velocidad de penetración de este sistema depende de la dureza o resistencia de la roca y de las variables de operación, que son las siguientes:
Velocidad de rotación
Fuerza de empuje
Diámetro de la perforación
Velocidad y caudal del aire de barrido
Desgaste de los trépanos
Se pueden distinguir dos tipos de triconos: de dientes y de insertos de carburo de tungsteno. Los triconos de dientes tienen un coste menor, aproximadamente una quinta parte del de los insertos. Sin embargo, estos últimos presentan claras ventajas:
Mantienen la velocidad de penetración durante la vida útil
Requieren menos empuje para una determinada velocidad de penetración
Necesitan menos par, disminuyendo las tensiones sobre los motores de rotación
Reducen las vibraciones, con menos fatiga sobre la perforadora y el varillaje
Disminuye el desgaste sobre el estabilizador y la barra
Producen menos pérdidas de tiempo por cambios de boca y menos daños en las roscas.
Un Polimedia explicativo es el siguiente:
Os dejo a continuación algunos vídeos sobre triconos que espero os sean útiles.
Referencias:
DIRECCIÓN GENERAL DE CARRETERAS (1998). Manual para el control y diseño de voladuras en obras de carreteras. Ministerio de Fomento, Madrid, 390 pp.
INSTITUTO TECNOLÓGICO GEOMINERO DE ESPAÑA (1994). Manual de perforación y voladura de rocas. Serie Tecnológica y Seguridad Minera, 2ª Edición, Madrid, 541 pp.
UNIÓN ESPAÑOLA DE EXPLOSIVOS (1990). Manual de perforación. Rio Blast, S.A., Madrid, 206 pp.
YEPES, V. (2014). Maquinaria para sondeos y perforaciones. Apuntes de la Universitat Politècnica de València, Ref. 209. Valencia, 89 pp.
La draga de succión con cabezal cortador, también conocida como cutter suction dredger o, simplemente, cutter en inglés, es un tipo de draga que cuenta con un cabezal cortador sumergible capaz de manejar materiales compactos y de alta producción volumétrica. Gracias a sus equipos de succión, el material se transporta a bordo para su bombeo inmediato. Su campo de aplicación es muy amplio, desde la restauración de terrenos hasta rellenos hidráulicos.
Estas dragas funcionan de forma estacionaria, pero pueden ser remolcadas sobre pontonas o incluso autopropulsadas (especialmente las más grandes). La combinación de características mecánicas e hidráulicas permite que estas dragas utilicen un dispositivo mecánico para cortar el material y un sistema hidráulico para su transporte y vertido mediante tuberías.
Puede dragar cualquier tipo de material, excepto las rocas de alta dureza. El dragado de bolos y piedra quebrantada de gran tamaño presenta dificultades, pues el material debe pasar por el cortador y las bombas centrífugas. Además, el dragado de materiales cohesivos, como la arcilla, puede obstruir el cortador y cerrarlo, lo que reduce drásticamente la producción.
La draga cuenta con un spud en la popa para operar y mantener su posición, así como con dos anclas en la proa. Gracias a las anclas, la embarcación puede realizar movimientos transversales de borneo durante su operación, mientras que el spud de popa le permite avanzar longitudinalmente. Además, el tubo de succión se encuentra en la proa. Muchas dragas están equipadas con una pluma en la proa que les permite mover las anclas de borneo por sí mismas.
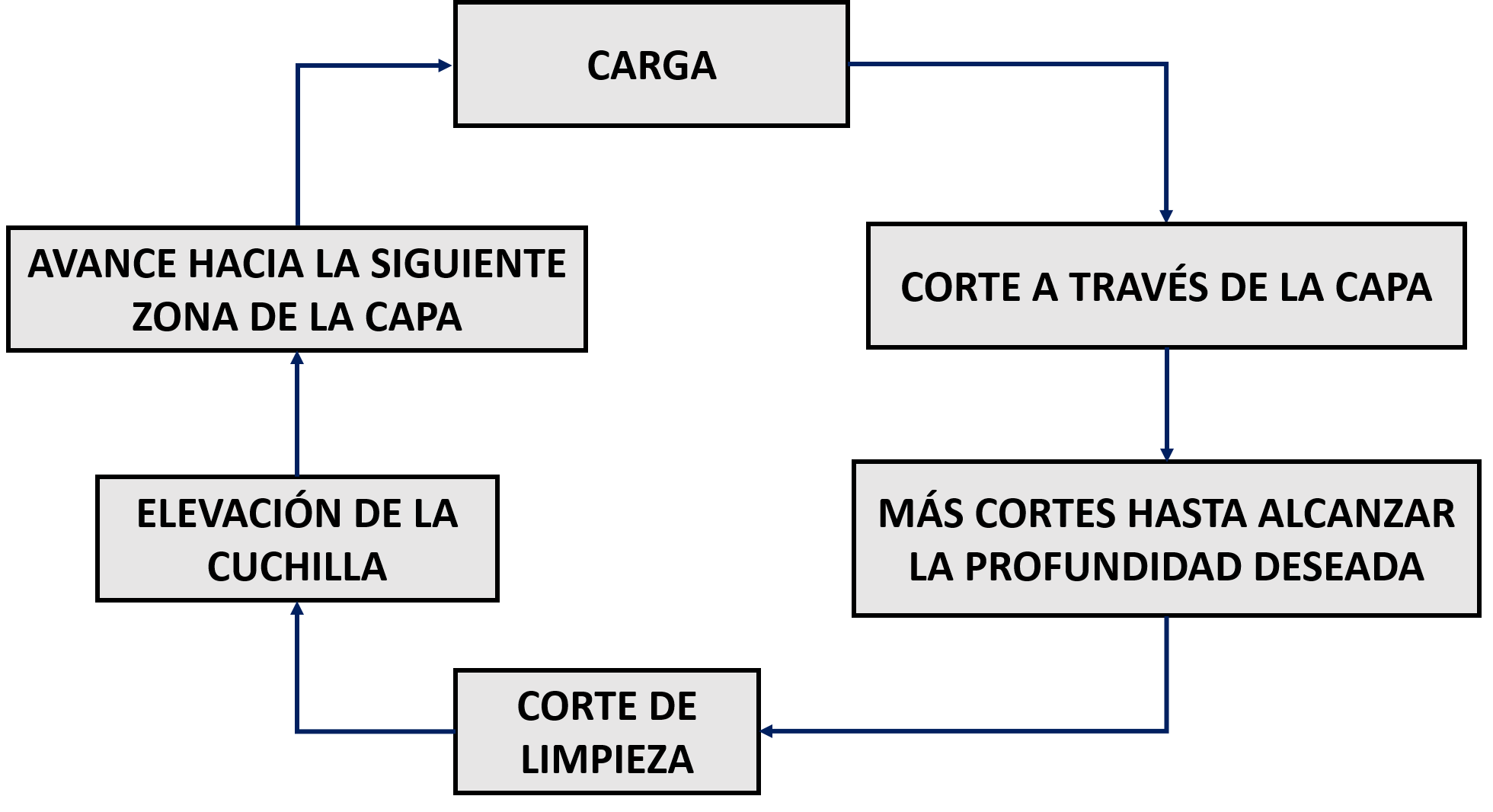
Ciclo de trabajo:
Navegación hacia el área de operación
Fijación de la embarcación (basada en el número de anclas o spuds disponibles)
Duración del proceso de carga (que depende del espesor y tipo de terreno)
Descarga sobre el gánguil, o bombeo por tubería
Desplazamiento de los anclajes o spuds
Figura 2. Ciclo de trabajo de la draga de succión con cortador (Bray et al., 1997)
Una vez que la pontona se ubica en la zona de dragado, las spuds se anclan y, en caso de emplear tubería, se conecta desde la embarcación hasta el punto de descarga. Luego, se baja la cabeza cortadora hasta alcanzar la profundidad deseada, se encienden las bombas de dragado y se activa el motor del cortador. Con materiales blandos, el grosor de corte es igual al diámetro de la cabeza cortadora. No obstante, con rocas y arcillas duras, la profundidad de corte es menor que el diámetro del cabezal. Por lo tanto, en este caso, se suelen dar varias pasadas antes de avanzar el equipo. En general, para completar el proceso de corte, se realiza una última pasada hasta alcanzar la altura del cortador. Una vez terminado el corte de esta sección, se levanta el spud y se desplaza el equipo hacia adelante, repitiendo el proceso.
Las producciones son moderadamente elevadas y están determinadas por la eficiencia de las bombas, la potencia del cortador y la distancia de bombeo. El diámetro de la tubería de succión oscila entre 150 mm y 1.100 mm, y el poder de corte de la cabeza cortadora varía entre 15 kW y 4.500 kW. La instalación de una bomba en la escala de la draga mantiene la producción sin variaciones significativas, independientemente de la profundidad. A pesar de que la adquisición de estos equipos requiere una inversión considerable y el costo del personal es medio, la producción elevada reduce significativamente el coste unitario.
En cuanto a las ventajas de esta draga, destacan las siguientes: la capacidad de dragar una amplia variedad de materiales, incluida la roca, y transportarlos directamente mediante bombeo a las áreas de descarga o restauración. Además, esta draga es efectiva en zonas con un radio de acción limitado y puede operar en aguas poco profundas, lo que permite nivelar el fondo marino y alcanzar altos volúmenes de producción. Para los equipos más avanzados, también es posible realizar operaciones de dragado siguiendo un perfil predeterminado.
La draga presenta una serie de desafíos en su funcionamiento. Es muy sensible a las condiciones marítimas debido al uso exclusivo de un spud, lo que reduce la precisión del dragado en comparación con los sistemas que emplean anclas. La profundidad máxima de dragado se limita a unos 35 m. Además, el oleaje puede afectar la dilución del material dragado y limitar la profundidad de este proceso. Desde un punto de vista económico, la distancia de transporte del material está limitada por los elevados costos de desplazamiento de la draga.
Las cabezas cortadoras más empleadas son de tipo corona, compuestas por un grupo de cuchillas diseñadas especialmente para cortar o romper el fondo marino y dirigir el material hacia la entrada del tubo de succión. Hay tres tipos de cuchillas más comunes:
Cuchilla con hojas de filo plano, ideal para materiales blandos como arena, sedimentos y arcilla.
Cuchilla con hojas de filo aserrado, usadas para materiales consolidados como arcillas duras, arenas densas y, en algunos casos, para trabajar con rocas muy débiles y altamente meteorizadas.
Cuchillas para roca, con hojas diseñadas para mantener el mayor número posible de dientes en contacto con la capa, independientemente de la profundidad de dragado. La forma de la cuchilla varía en función del material a trabajar y puede ser en forma de trépano para arcillas compactas y rocas débiles, o en forma de pica para rocas de dureza moderada.
La eficacia de las dragas depende de sus características específicas, sin embargo, se pueden establecer unos parámetros mínimos para determinar su viabilidad económica en términos de operación. Para que una draga sea considerada viable, debe tener una profundidad mínima de trabajo de 0,75 m y una profundidad máxima de dragado de 35 m. Además, la anchura máxima de corte debe ser de 175 m, la altura máxima de las olas debe ser de 2 m, la velocidad máxima de la corriente debe ser de 2 nudos, el espesor máximo de la capa de hielo debe ser de 200 mm, el tamaño máximo de partícula debe ser de 500 mm y la resistencia máxima a la compresión del terreno debe ser de 50 MPa.
Es importante tener en cuenta que, cuando las operaciones de dragado se realizan en aguas confinadas, donde el caudal es insuficiente para el bombeo de la draga, el nivel del agua puede disminuir de forma sostenida, lo que puede causar problemas operativos y graves impactos ambientales. Es relevante destacar que incluso las dragas más pequeñas pueden remover 300 m³/h, lo que demuestra su poder y su capacidad de impacto.
Os paso los siguientes vídeos donde se puede ver cómo trabaja esta máquina:
A continuación os paso un vídeo sobre Artemis, la segunda draga de succión cortadora autopropulsada construida para Van Oord en los Países Bajos.
[politube2]65108:450:384[/politube2]
Referencias:
BRAY, R.N.; BATES, A.D.; LAND, J.M. (1997). Dredging: A handbook for engineers. 2nd edition, Willey, 434 pp.
CLEMENTE, J.J.; GONZÁLEZ-VIDOSA, F.; YEPES, V.; ALCALÁ, J.; MARTÍ, J.V. (2010). Temas de procedimientos de construcción. Equipos de dragado. Editorial de la Universitat Politècnica de València. Ref. 2010.4038.
SANZ, C. (2001). Manual de equipos de dragado. Ed. Carlos López Jimeno. Madrid, 323 pp.
El puente colgante sobre el Vinalopó, en Elche, es una estructura diseñada por FHECOR (Hugo Corres y José Romo) y construida por FCC Construcción. Se trata de un tablero metálico asimétrico, con un canto transversal variable de 0,75 a 0,52 m, de 164,50 m de longitud y 23 m de ancho, que se cuelga con 54 péndolas, sujetas a dos catenarias de ocho cables cada una. Los cables parten de una estructura de contrapeso anclada a tierra, que se eleva hasta una silla desviadora metálica situada en un mástil de hormigón de 43 m de altura, y desciende en catenaria hasta el contrapeso de estribo opuesto, cubriendo una distancia de 244 m entre contrapesos.
Los cables principales se montaron con un sistema de cable guía. Las péndolas y sus conexiones con el cable principal han sido montadas mediante un sistema especialmente diseñado que circulaba sobre los cables principales ya instalados. El tablero metálico se montó con grúas, dejando articuladas las uniones de los paños entre sí. El hormigonado de la losa se realizó de una sola vez, utilizando un hormigón con retardador de fraguado para que el hormigonado tuviera lugar cuando el tablero estuviera totalmente hormigonado. La conexión entre acero y hormigón se realizó mediante pernos conectadores tipo Nelson.