La traílla remolcada consiste en una caja montada sobre dos ejes con neumáticos; un eje portador en la parte posterior y un eje, con timón de remolque y dirección, en la parte delantera. Se remolca normalmente por medio de un tractor de orugas. El chasis puede llevar en la parte de atrás un tampón de empuje con miras a la utilización de un empujador. Son adecuadas para distancias cortas. Se fabrican hasta de 24 m3 de capacidad, aunque están siendo sustituidas por las mototraíllas. Presentan un mayor esfuerzo de tiro, debido a una buena tracción, incluso en pistas de mal estado. Salvo algún caso excepcional, hoy solo se utilizan en trabajos de poca envergadura o de tipo agrícola. En la figura puede verse una traílla remolcada por un tractor agrícola usada en la redistribución de arena en las playas.
Os dejo a continuación un par de vídeos que ilustran bien el modo de trabajo de estas máquinas. En el primer vídeo se puede ver una máquina empleada en movimiento de tierras, mientras que en el segundo se ve un trabajo de tipo agrícola.
Referencias:
YEPES, V. (2014). Maquinaria de movimiento de tierras. Apuntes de la Universitat Politècnica de València, Ref. 204. Valencia, 158 pp.
La norma ISO 6165:2012 define como cargadora a la máquina autopropulsada sobre ruedas o cadenas con un equipo montado en la parte frontal, cuya función principal es la operación de carga (utiliando una cuchara), con la que carga o excava mediante el movimiento de la máquina hacia delante. Por tanto, aparte de la cuchara frontal, su estructura, soporte y un sistema de brazos articulados capaz de cargar y excavar mediante su desplazamiento y el movimiento de sus brazos, y de elevar, transportar y descargar materiales.
Son máquinas diseñadas para la excavación, carga y pequeño transporte de material. Se denominan genéricamente palas cargadoras, aunque otros nombres podrían ser la de pala tractora o cargadora frontal. Se trata de un tractor al que se le acopla una cuchara que se llena por empuje de la máquina sobre el terreno, dotada de un dispositivo de elevación y otro de volteo para manipular las tierras. Estas máquinas tienen como funciones principales las de cargar en las unidades de transporte materiales sueltos o la alimentación de tolvas, acopiar productos, efectuar operaciones de excavación en terrenos no muy duros o compactos, elevación y manejo de cargas y acarreos a distancias pequeñas de materiales (no más de 30 o 50 m. si no se quiere bajar rápidamente su producción). Atendiendo a su sistema de desplazamiento, se dividen en palas cargadoras sobre neumáticos y sobre orugas.
Como una imagen vale más que mil palabras, os dejo unos vídeos para que veáis cómo trabaja esta máquina.
https://www.youtube.com/watch?v=z002KeNgdy4
Referencias:
AENOR (2012). UNE-EN ISO 6165 «Maquinaria para movimiento de tierras. Tipos básicos. Identificación, términos y definiciones».
YEPES, V. (2014). Maquinaria de movimiento de tierras. Apuntes de la Universitat Politècnica de València, Ref. 204. Valencia, 158 pp.
El turnadozer es un tractor montado sobre neumáticos. A diferencia de los tractores montados sobre orugas, los buldóceres (bulldozers, en inglés), los turnadozers transmiten mayor presión específica sobre el terreno (0,35 MPa). Presentan una tracción de hasta 82 t, necesitan tracción a las cuatro ruedas y son más veloces que los buldóceres (hasta 60 km/h), por lo que presentarían cierta ventaja en el desplazamiento de tierras a mayores distancias (aunque entraría en competencia con las cargadoras). Sin embargo, no son aconsejables en terrenos rocosos por el desgaste y los cortes de neumáticos. Es por ello que no son muy frecuentes en las obras. En una de mis primeras obras tuve la ocasión de utilizar uno de ellos, debido a exigencias de uso del parque de maquinaria de la empresa, pero se usaba principalmente para labores auxiliares de limpieza de la zona de carga y en el mantenimiento de pistas y caminos de obra.
Un vídeo antiguo sobre esta máquina, que espero os guste.
Figura. Fresado de firme envejecido. Imagen: Grupo Sorigué
Las fresadoras son máquinas que arrancan un determinado grueso del firme de una carretera. El equipo de trabajo dispone de piezas metálicas en revolución que levantan las partes defectuosas del pavimento sin tocar las que estén en buen estado. El corte se realiza mediante unas cuchillas o dientes situados en el tambor fresador. El material arrancado se carga directamente en un camión mediante una cinta transportadora. El material resultante puede ser reutilizado para la fabricación de nuevas mezclas asfálticas o como suelo seleccionado o adecuado en la misma obra. Si se efectúan una sola pasada que elimine el largo, ancho y espesor necesario, los tiempos de trabajo se reducen considerablemente reduciéndose el impacto en el tráfico.
El grupo fresador está formado por un rodillo al que se unen unos dientes o cuchillas que giran en sentido contrario al sentido de avance de la máquina. Estos dientes son de acero endurecido, reemplazables cuando se rompen o desgastan. La tracción de la máquina puede realizarse mediante orugas o con ruedas de goma macizas.
Os dejo algunos vídeos de cómo funciona esta máquina.
Referencias:
YEPES, V. (2014). Maquinaria para la fabricación y puesta en obra de mezclas bituminosas. Apuntes de la Universitat Politècnica de València. Ref. 749.
El gánguil, también llamado pontón o barcaza, es una embarcación plana, con una cántara o depósito donde se almacena el material dragado y que sirve para transportarlo hasta el lugar de vertido.
Presenta una capacidad entre 50 y 2000 m³. Pueden ser autopropulsados (mar abierto) o remolcados (aguas poco profundas).
Según el modo de descarga, los gánguiles se pueden clasificar en:
Gánguil cerrado: descarga por medios mecánicos auxiliares
Gánguil de compuerta de fondo: descarga por la apertura de una compuerta giratoria
Gánguil de charnela: vaciado por apertura longitudinal del casco
Gánguil de volcado lateral
Vamos a ver en un par de vídeos varios ejemplos de cómo funciona esta máquina de transporte. En el primer vídeo veremos un gánguil de 57 m de eslora y 11,20 m de manga, con una capacidad de transporte de 1400 toneladas de escollera.
En el segundo, podremos ver el sistema de apertura de cántara de doble sentido y de velocidad controlable.
[politube2]65110:450:384[/politube2]
Referencias:
CLEMENTE, J.J.; GONZÁLEZ-VIDOSA, F.; YEPES, V.; ALCALÁ, J.; MARTÍ, J.V. (2010). Temas de procedimientos de construcción. Equipos de dragado. Editorial de la Universitat Politècnica de València. Ref. 2010.4038.
La turbina Francis, desarrollada por James B. Francis, es una turbomáquina motora a reacción y de flujo mixto. Son turbinas hidráulicas que se pueden diseñar para un amplio rango de saltos y caudales, capaces de operar en desniveles que van de los dos metros hasta varios cientos de metros. Esto, junto con su alta eficiencia, ha hecho que este tipo de turbina sea el más usado en el mundo, principalmente para la producción de energía eléctrica en centrales hidroeléctricas. Son muy costosas de diseñar, fabricar e instalar, pero pueden funcionar durante décadas.
Estas turbinas presentan un diseño hidrodinámico que garantiza un alto rendimiento debido a las bajas pérdidas hidráulicas. Son robustas, con bajo costo de mantenimiento. Sin embargo, no se recomienda su instalación con alturas de agua mayores de 800 m ni cuando existen grandes variaciones de caudal. Asimismo, es muy importante controlar la cavitación.
Figura 2. Espiral de entrada de una turbina Francis, Presa Grand Coulee.
Las partes de una turbina Francis son las siguientes:
Cámara espiral: distribuye uniformemente el fluido en la entrada del rodete. La forma en espiral o caracol se debe a que la velocidad media del fluido debe permanecer constante en cada punto de la misma. La sección transversal puede ser rectangular o circular, siendo esta última la más utilizada.
Predistribuidor: formado por álabes fijos que tienen una función netamente estructural, para mantener la estructura de la caja espiral y conferirle rigidez transversal, que además poseen una forma hidrodinámica para minimizar las pérdidas hidráulicas.
Distribuidor: constituido por álabes móviles directores, cuya misión es dirigir convenientemente el agua hacia los álabes del rodete (fijos) y regular el caudal admitido, modificando de esta forma la potencia de la turbina de manera que se ajuste en lo posible a las variaciones de carga de la red eléctrica, a la vez de direccionar el fluido para mejorar el rendimiento de la máquina. Este recibe el nombre de distribuidor Fink.
Rotor o rodete: es el corazón de la turbina, pues aquí tiene lugar el intercambio de energía entre la máquina y el fluido. En forma general, la energía del fluido al momento de pasar por el rodete es una suma de energía cinética, energía de presión y energía potencial. La turbina convierte esta energía en energía mecánica que se manifiesta en el giro del rodete. El rodete a su vez transmite esta energía por medio de un eje a un generador eléctrico dónde se realiza la conversión final en energía eléctrica. El rotor puede tener diversas formas dependiendo del número específico de revoluciones para el cual esté diseñada la máquina, que a su vez depende del salto hidráulico y del caudal de diseño.
Tubo de aspiración: es la salida de la turbina. Su función es darle continuidad al flujo y recuperar el salto perdido en las instalaciones que están por encima del nivel de agua a la salida. En general se construye en forma de difusor, para generar un efecto de aspiración, el cual recupera parte de la energía que no fuera entregada al rotor en su ausencia.
Las turbinas Francis se pueden clasificar en función de la velocidad específica del rotor y de las características del salto:
Turbina Francis lenta: para saltos de gran altura, alrededor de 200 m o más
Turbina Francis normal: indicada en saltos de altura media, entre 200 y 20 m
Turbina Francis rápidas y extrarrápidas: apropiadas para saltos de pequeña altura, inferiores a 20 m
A continuación os paso un par de vídeos explicativos que espero os sean de utilidad:
Os paso un vídeo de una Turbina Francis de la Central Hidroeléctrica de la Presa Susqueda en funcionamiento, produciendo 27,5 MW por caída hidráulica de 162 m.
Referencias:
YEPES, V.; MARTÍ, J.V. (2017). Máquinas, cables y grúas empleados en la construcción.Editorial de la Universitat Politècnica de València. Ref. 814. Valencia, 212 pp.
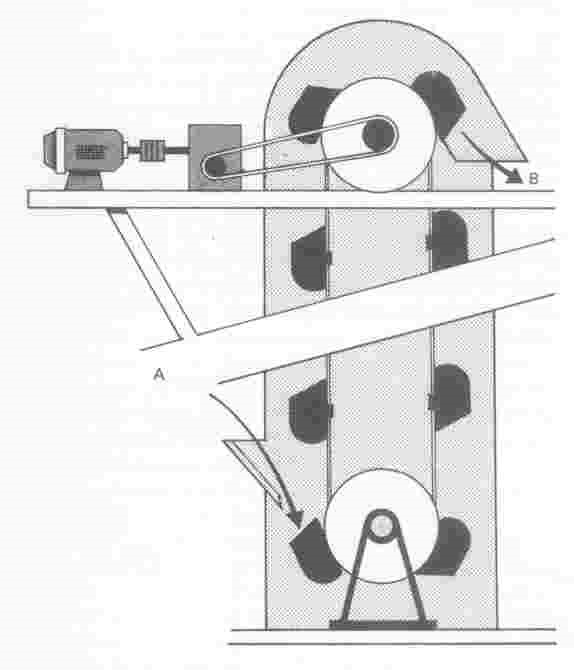
Elevador de cangilones. A. Zona de carga; B. Zona de descarga.
Se entiende por elevador de cangilones el conjunto de una cadena sinfín de la cual van colgados cangilones iguales para el transporte del material. Consta de los siguientes elementos (ver figura):
Cangilones de transporte del material.
Un elemento sinfín sobre el cual se fijan los cangilones.
Una rueda motora superior y otra inferior, cuyos ejes de giro están en la misma vertical.
Un grupo motor de accionamiento, acoplado a la rueda superior.
Una caja, dentro de la cual se sitúan el elemento sinfín, los cangilones y las ruedas. En su parte superior lleva una boca de descarga, y en la inferior, la de carga.
La forma de los cangilones y la velocidad del elevador depende de los materiales a transportar. Suelen tener forma de cubeta con la parte superior abierta. Los cangilones se sujetan espaciados sobre una banda de algodón y goma o sobre una o dos cadenas. Aunque son normalmente verticales, pueden disponerse en planos inclinados. El sistema de descarga puede ser por gravedad o centrífugo.
Las velocidades de elevación varían entre 0,5 y 4 m/s. La anchura de los cangilones puede llegar a 1,5 m. La altura de elevación puede ser de 50 m y más; y su capacidad, hasta 500 o 600 m3/hora.
A continuación os dejo vídeo de su funcionamiento.
Referencias:
YEPES, V.; MARTÍ, J.V. (2017). Máquinas, cables y grúas empleados en la construcción. Editorial de la Universitat Politècnica de València. Ref. 814. Valencia, 210 pp.
¿Cómo se puede rellenar una doble barrera de hormigón tipo New Jersey de forma rápida y económica? Os voy a explicar un truco que utilizamos en una de mis primeras obras, cuando trabajaba en Dragados y Construcciones, en el año 1991. Se trata de la remodelación de la autovía V-30, una vía rápida de circunvalación de la ciudad de Valencia que permite un acceso rápido al Puerto de Valencia desde la A-7 en su tramo del By-pass de Valencia.
La solución fue ingeniosa y sencilla. Montamos en obra una máquina que constaba de una tolva en la que los camiones vertían el material. Esta tolva alimentaba una cinta transportadora que vertía el material directamente entre las dos barreras tipo New Jersey. Un tractor sencillo empujaba esta tolva. A este invento lo llamamos Sirius 70 y alcanzamos producciones de unos 70 m³/h. A continuación, os dejo algunas fotografías de aquella época para que podáis ver lo que hicimos. Espero que os guste el truco y la anécdota.
La innovación en la maquinaria de la construcción avanza hacia la especialización y la autonomía de los equipos. Así hoy día existen equipos de demolición de elevada potencia capaces de funcionar mediante mando a distancia con bluetooth, incluso a 100 m sin peligro de interferencias y con seguridad para el operario. Esto es especialmente interesante en trabajos en zonas peligrosas con desniveles o con accesos reducidos. Si además funcionan de forma eléctrica, es posible su uso en recintos cerrados al no provocar humos de combustión. Sin embargo los usos también se encuentran fuera de la ingeniería civil, como es el caso de la manipulación de escombros o la realización de trabajos en altas temperaturas como acerías y fundiciones, limpiar hornos en cementeras, o trabajos en túneles y galerías en el sector minero.
A continuación os dejo un vídeo explicativo de los robots de Husqvarna, que espero os sea de utilidad.
Estas máquinas trituran el material que se recibe de la cantera. Aparecen en los EE.UU. (1879) y se comercializan a partir de 1881 bajo el nombre de trituradores giratorios Gates y en Europa aparecen a partir de 1920. Son equipos que trituran el material por compresión, al igual que las machacadoras de mandíbulas, pero utilizando una pieza troncocónica, denominada «nuez», que se mueve excéntricamente en el interior de un espacio limitado por una pared troncocónica invertida, denominada «bastidor», «carcasa» o «cóncavo». El eje del cono móvil se suspende por su parte superior a un travesaño en arco que se apoya en el anillo cóncavo de la trituradora.
Las machacadoras giratorias primarias podrían considerarse, de hecho, como una machacadora de mandíbulas continua, pues su trabajo consiste en una sucesión ininterrumpida de acciones de presión y expansión. Por este motivo, se podría decir que las trituradoras giratorias trabajan en continuo en la mitad de su volumen, mientras que las de mandíbulas trabajan la mitad del tiempo con la totalidad del volumen. Sin embargo, el material triturado que sale de esta máquina es más cúbico que el producto de la machacadora de mandíbulas. Los rendimientos de la trituradora giratoria también suelen ser más altos respecto a la de mandíbulas, pero su coste es mayor. La razón de reducción conseguida está en torno a 6, y el tamaño de admisión suele ser inferior a 900 mm. El producto de salida, está en torno a los 150 mm de tamaño.
Las trituradoras giratorias primarias son máquinas que pueden alimentarse directamente desde un camión, prescindiendo muchas veces de los costosos sistemas de alimentación. El travesaño donde se apoya la nuez divide en dos a la boca de admisión de la trituradora, lo cual divide le flujo del material cuando se descarga desde el camión (mayor homogeneneidad). La nuez de la trituradora no gira, sino que tiene un movimiento de cabeceo similar al del badajo de una campana. Esto evita la atricción del material, por lo que en el caso de material abrasivo, se preferirá siempre la trituradora primaria giratoria frente a la de mandíbulas. Las compresiones y aperturas alternativas que provoca este movimiento permite el descenso de los fragmentos y su salida. El consumo de energía varía en función del tamaño del equipo, desde 0,3 a 1,2 CV/h/t. En el mercado se pueden encontrar trituradores giratorios primarios que pueden alcanzar los 7 m de diámetro en la boca de alimentación y tener un peso total de 800 toneladas.
Por otra parte, existen machacadoras giratorias secundarias, situadas tras la machacadora de mandíbulas o giratoria primaria. Su uso es como primarios en el caso de graveras o secundarios en canteras. Se caracterizan por tener una boca de alimentación menor, una cámara de trituración más tendida, obtiene un producto más pequeño, su tamaño de admisión está entre 400 y 700 mm, su razón de reducción entre 5 y 10 y además, presentan una mayor velocidad de giro (250 r.p.m.).
Os paso un Polimedia donde se explica el funcionamiento básico de este tipo de trituradoras:
Dejo a continuación un vídeo donde se muestra la alimentación de esta trituradora y su funcionamiento:
Referencias:
FUEYO, L. (1999). Equipos de trituración, molienda y clasificación: tecnología, diseño y aplicación. Editorial Rocas y Minerales. 1ª edición. Fueyo Editores. Madrid, 371 pp. ISBN: 84-923128-2-3.
LÓPEZ JIMENO, C. (1998). Manual de áridos. 3ª edición. Ed. Carlos López Jimeno. Madrid, 607 pp. ISBN: 84-605-1266-5.
MARTÍ, J.V.; GONZÁLEZ, F.; YEPES, V. (2005). Temas de procedimientos de construcción. Extracción y tratamiento de áridos.Editorial de la Universidad Politécnica de Valencia. Ref. 2005.165. Valencia.
TIKTIN, J. (1994). Procesamiento de áridos: instalaciones y puesta en obra de hormigón. Universidad Politécnica de Madrid. Escuela Técnica Superior de Ingenieros de Caminos, Canales y Puertos. Madrid, 360 pp. ISBN: 84-7493-205-X.