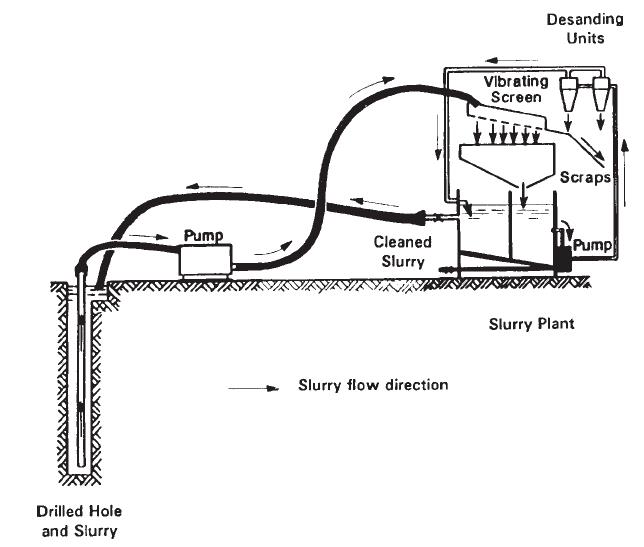
En artículos anteriores hemos descrito los fluidos estabilizadores de excavaciones. Dentro de este uso, la estabilización de excavaciones de muros pantalla esta ampliamente difundida en España. Los fluidos bentoníticos se utilizan también habitualmente para estabilizar las paredes de la excavación de pilotes excavados de cierto diámetro e incluso en los de pequeño diámetro en competencia con las entibaciones recuperables. También se usan en estos fluidos de perforación en la Perforación Horizontal Dirigida. En cualquier caso, uno de los problemas a resolver es separar las partículas de la excavación del fluido para que pueda ser reutilizado. Para ello se describe a continuación brevemente el funcionamiento de una planta desarenadora.
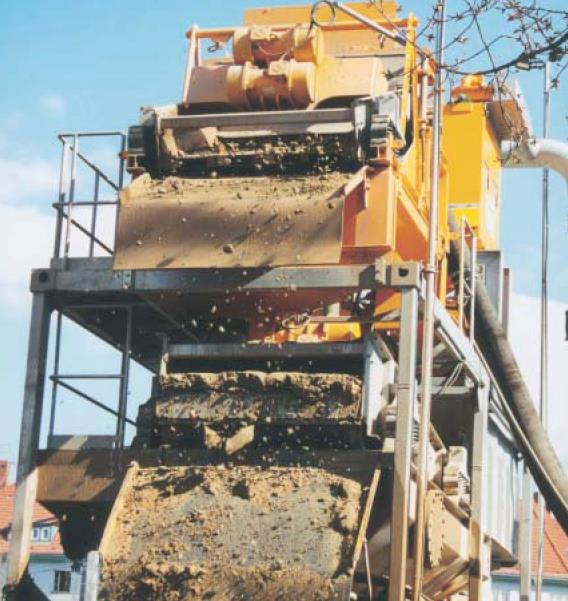
La misión de las plantas desarenadoras es la de separar las partículas de suelo (sólidos) que se encuentran en suspensión en los fluidos estabilizadores. Son necesarias para la reutilización de los lodos (circuito de recirculación). Además de en cimentaciones profundas se utilizan también en plantas de tratamiento de áridos, obras de túneles, etc.
El contenido de arena y otras partículas en suspensión en los lodos minerales debe ser inferior al 4% del volumen antes de volver a verterlo en la excavación. En el caso de polímeros este porcentaje debe ser inferior al 1%. Antes del hormigonado se permite máximo hasta el 10%.
Se pueden distinguir en el mercado dos tipos de desarenadoras; aquellas por las que el fluido a limpiar pasa una única vez por un hidrociclón y las que pasan dos. El de simple ciclonado está recomendado para terrenos poco arenosos o con arenas poco finas; en este caso, los lodos solo pasan una vez por el ciclón tras pasar por una o varias fases de criba con el objeto de eliminar el material de mayor tamaño. El desarenador de doble ciclonado es más eficaz, pues presentan una mayor capacidad de regeneración del fluido, siendo necesario para terrenos arenosos o con muchas arenas finas, incluso limos; normalmente tras pasar a través del ciclón principal pasan por una serie de hidrociclones más pequeños.
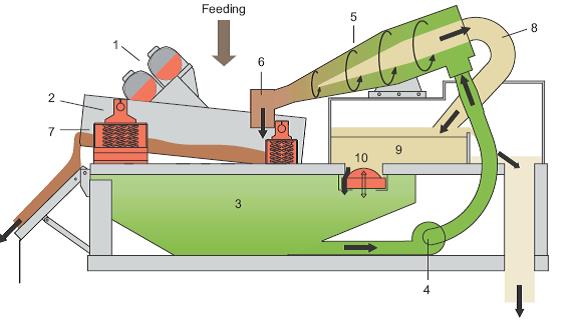
En la Figura 4 se muestra el esquema de una desarenadora con un solo paso a través del ciclón, en el que se distinguen los siguientes elementos:
(1) Motores para las cribas vibratorias.
(2) Criba de gruesos que realiza funciones de “precribado”, retiene partículas > 5mm.
(3) Tanque de almacenamiento del material procedente de la criba de gruesos.
(4) Bomba de alimentación del ciclón a 2-3 bar.
(5) Hidrociclón;.
(6) Salida de sólidos del hidrociclón.
(7) Cribas separadoras del agua del material grueso procedente del hidrociclón.
(8) Salida superior del hidrociclón, con el fluido “limpio”.
(9) Depósito de regulación
(10) Control automático de nivel.
El rendimiento de una desarenadora se mide en m3/h de fluido estabilizador regenerado. Para determinar la eficiencia se mide a través del punto de corte o “cut point”, que es el d50, que mide el menor tamaño de partícula en suspensión que al menos el 50% puede ser separado del fluido. Se mide en 1/1000 mm o micras.
Referencia:
YEPES, V. (2020). Procedimientos de construcción de cimentaciones y estructuras de contención. Colección Manual de Referencia, 2ª edición. Editorial Universitat Politècnica de València, 480 pp. Ref. 328. ISBN: 978-84-9048-903-1.

Esta obra está bajo una licencia de Creative Commons Reconocimiento-NoComercial-SinObraDerivada 4.0 Internacional.





















