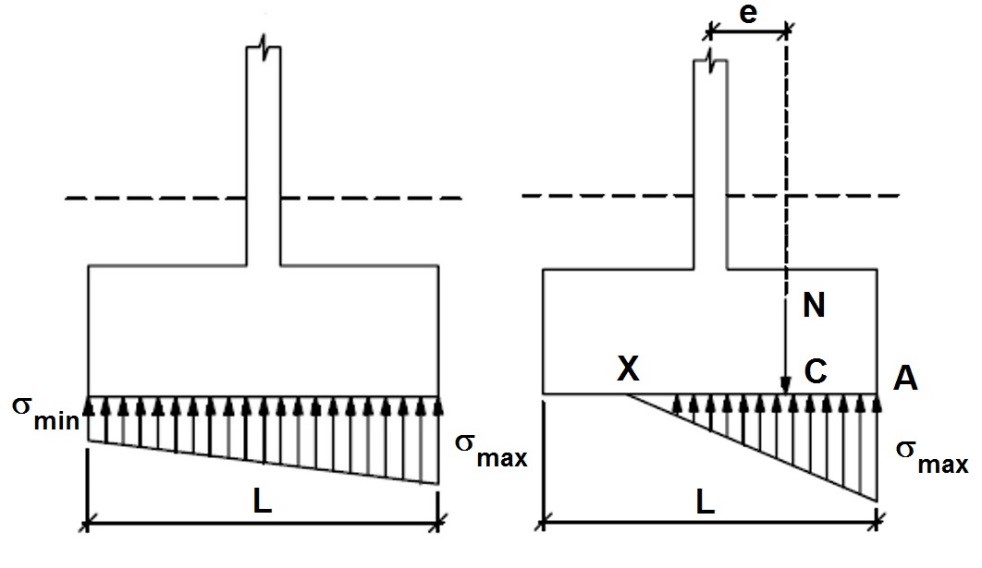
Figura 1. Distribución de la tensión transmitida al terreno
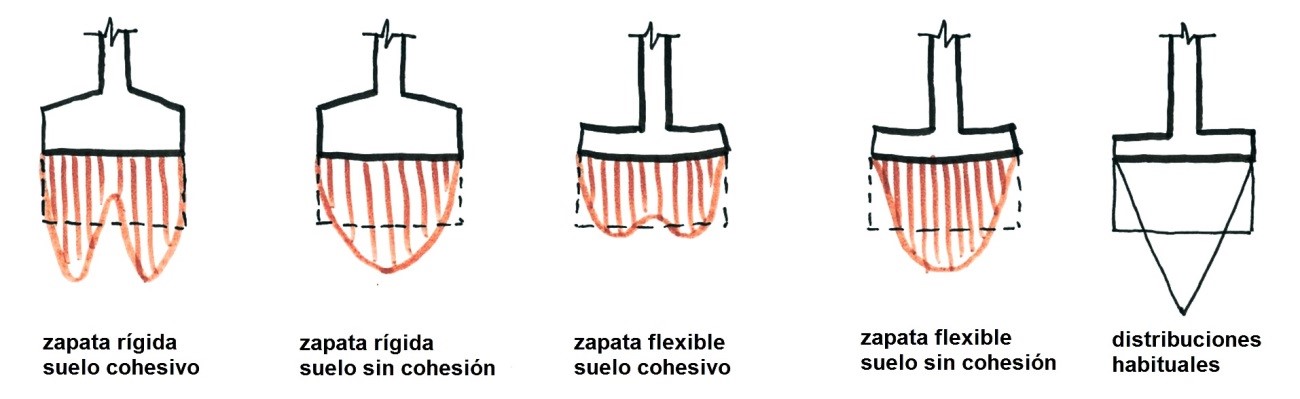
Las cimentaciones superficiales suelen ser las más utilizadas, especialmente en edificación, pues presentan un menor coste por carga soportada y una mayor facilidad de ejecución. Los esfuerzos, tanto los verticales, los horizontales, como los momentos, se transmiten en su totalidad al terreno a través de su base de contacto y origina en el terreno unas distribuciones que se consideran normalmente planas. No debe rebasarse la capacidad portante del terreno y las deformaciones producidas deben ser admisibles para la estructura. En la Figura 1 se puede ver cómo una excentricidad en la carga puede provocar zonas de despegue de tensiones en el apoyo de la zapata. En la Figura 2 se observa cómo cambia la distribución de presiones en función de tipo de suelo (cohesivo, granular o roca) y del tipo de zapata (rígida o flexible). Sin embargo, con cimentaciones corridas o aisladas y con los vuelos de zapata habituales, se acepta una distribución uniforme de presiones. Es importante la forma en que se transmiten los esfuerzos al terreno, puesto que la carga soportada por éste es mucho menor que la del elemento en contacto con él.
Figura 2. Distribución de tensiones en función de la naturaleza del suelo
Un aspecto de gran importancia es la presencia de agua, pues su agotamiento supone un incremento en coste y un aumento de plazo que puede hacer inviable una cimentación superficial. Por otra parte, el nivel freático no influirá en la capacidad portante del terreno si dicho nivel se encuentra por debajo de la superficie del cimiento a una profundidad mayor a 1,5 veces el ancho de la zapata.
A continuación os dejo un vídeo donde explico con más detalle lo que es una cimentación superficial y los tipos que existen. Espero que os sea de interés.
Os dejo también este vídeo (en inglés) explicativo:
Las nuevas tecnologías están cambiando profundamente la forma que tenemos de comunicarse. Todo es más rápido, directo y con mayor impacto.
En esta entrada voy a dar difusión a un evento que se desarrollará en línea, cuya inscripción es totalmente gratuita. Se trata del simposio #GeoRoads19, “La pasión por las carreteras”. Se trata de una conferencia que se desarrollará los días 11 y 12 de abril de 2019 y se retransmitirá desde los estudios de ITAFEC en Guadalajara, Jalisco, México. Si queréis inscribirse, lo podéis hacer ya en el siguiente enlace: https://www.geotechtips.com/georoads19. El cupo es limitado a los primeros 1500 inscritos.
Pero antes de dar más detalles, lo primero que tengo que hacer es agradecer la invitación de Freddy J. Sánchez-Leal, director de Geotechtips, que ha tenido la amabilidad de incluirme en el panel de expertos internacionales que van a participar en las conferencias.
Contará con la participación de 8 muy reconocidos expertos de Argentina, Chile, Colombia, Costa Rica, Estados Unidos, España, Perú y México, que nos disertará cada uno en una presentación de 30 minutos sobre sus paradigmas personales relacionados con la ingeniería de carreteras.
Se abarcará el tema de la infraestructura vial desde los aspectos de la investigación, desarrollo y aplicación de tecnologías, construcción, auscultación, mantenimiento y conservación, entre otros.
Se realizarán cuatro presentaciones por día, dejando un espacio de 30 minutos entre presentación para recibir y contestar las preguntas de la audiencia, y para la transmisión de publicidad de nuestros cuatro únicos anunciantes. Al final del segundo día se presentarán las conclusiones del evento, construidas directamente por un grupo seleccionado de asistentes, y moderadas desde el estudio aplicando la conocida técnica de los “6 Sombreros para pensar”.
Desde el estudio de TV en Guadalajara, se moderarán las presentaciones y organizando el desarrollo de las preguntas y de las demás actividades de intensa interacción entre el público y los presentadores.
La grabación de las presentaciones y todo el evento quedará de forma permanente en una sala exclusiva del portal de Geotechtips a la que los participantes podrán, luego del evento, acceder de forma gratuita. De la misma manera, personas que no se hayan registrado para el evento, pero que posteriormente quieran verlo, solo tendrán que acceder a esa sala, de igual manera gratuita.
Los conferenciantes previstos al simposio son los siguientes. Los podéis localizar en las redes sociales.
Dr. Rodolfo Adrián Nosetti. Profesor Adjunto en Universidad Nacional de La Plata, Argentina. Red social principal: Facebook Adrian Nosetti LinkedIn: adrian-nosetti-26022743
Dr. Guillermo Thenoux. Profesor en Pontificia Universidad Católica de Chile. Director del Centro de Ingeniería e Investigación Vial. LinkedIn: Guillermo-thenoux-8b7b5844
Dr. Fredy Alberto Reyes Lizcano. Profesor e Investigador en pavimentos e infraestructura vial en Pontificia Universidad Javeriana de Colombia, Bogotá. Red social principal: Facebook: Fredy Alberto Reyes Lizcano. LinkedIn: Fredy-Alberto-reyes-Lizcano-80b6282a
Dr. Luis Guillermo Loría-Salazar. Director del Laboratorio Nacional de Materiales y Modelos Estructurales (LanameUCR) de la Universidad de Costa Rica. Red social principal: Twitter @lgloria27 LinkedIn: luisguillermoloria
Dr. Juan José Potti. Presidente Ejecutivo de la Asociación Española de Fabricantes de Mezclas Asfálticas (ASEFMA). Madrid, España. Red social principal: Twitter: @jjpotti LinkedIn: juan-jose-potti-29a86ab
Dr. Paul Garnica Anguas. Director de los Laboratorios de Investigación en Infraestructura del Instituto Mexicano del Transporte. Sanfandila, Querétaro, México. Red social principal: Twitter: @pgarnica LinkedIn: paul-garnica
Ing. Pablo del Águila, MSc. Consultor Internacional en Infraestructura del Transporte para el American Development Bank. Director de Camineros Consulting. Lima, Perú. Red social principal: Twitter: @caminerosperu LinkedIn: pmdelaguila
Organizador:
Ing. Freddy J. Sánchez-Leal, M en I. Director de Geotechtips. Zapopan, Jalisco, México. Red social principal: Twitter: @saintloyal LinkedIn: ramcodesceo
En un artículo anterior explicamos los fundamentos de la perforación por extracción de material. De entre los procedimientos existentes, la perforación mecánica por rotación constituye uno de los procedimientos más habituales. Aquí vamos a explicar los principios básicos en los que se basa.
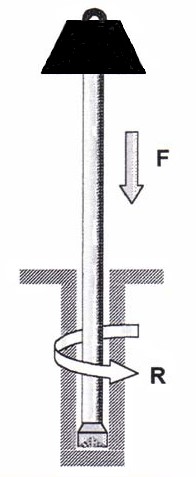
El principio utilizado por las perforadoras rotativas consiste en aplicar energía al terreno haciendo rotar un útil de corte o destroza conjuntamente con la acción de una fuerza de empuje. Este tipo de perforación se empezó a emplear en minería sobre rocas blandas; sin embargo, la rapidez de desplazamiento y montaje de estos equipos, la variedad de útiles de corte han favorecido su uso en otros campos.
El giro del útil lo realiza el motor de la perforadora en superficie, que acciona una mesa o cabeza de rotación que, a su vez, mueve el tren de varillaje y este finalmente transmite el giro al útil. Los útiles de corte que se emplean en rotación son las barrenas helicoidales, las coronas circulares y las cabezas tricono, según el tipo de terreno, del diámetro del talador y de la finalidad de la perforación (extracción de testigos o avance a destroza).
La perforación a rotación presenta características diferentes si se efectúa en roca o en suelos. En roca el avance se produce por corte y compresión: el giro se ejecuta mediante sonda o rotor y la presión por barra de carga, varillaje y empuje hidráulico. En el caso de los suelos, si estos son granulares no demasiado cohesivos, la perforación se realiza con una barrena helicoidal; en el caso de granulares muy sueltos es necesario el uso de cucharas.
El avance de la perforación rotativa en rocas se produce por la influencia simultánea de la presión que el útil de corte ejerce sobre el terreno y el efecto producido por el giro de dicho útil sobre la roca. Estas dos acciones se pueden provocar con diversos medios y potencia según las fuentes de energía y los sistemas de empuje y rotación empleados.
Las formas de energía motriz de uso más frecuente son la térmica y la eléctrica. La primera se suele utilizar en perforadoras pequeñas y medianas, generalmente montadas sobre camión en equipos accionados por el propio motor del camión o más frecuentemente por dos motores, el del camión más otro independiente. Para perforadoras montadas en equipos de mayor tamaño (diámetros de perforación superior a 250 mm, lo más normal es usar energía eléctrica a media tensión, alimentando la perforadora con corriente alterna. En algunas instalaciones mineras también se emplean equipos diésel-eléctricos cuyo coste de mantenimiento es aproximadamente un 15 % inferior al de los equipos diésel.
La aplicación de la potencia se realiza mediante mecanismos de transmisión mecánicos e hidráulicos. La energía se transmite a través de las barras de perforación, que giran al mismo tiempo que penetra la boca, debido a la intensidad de la fuerza de avance. Prácticamente, casi sin excepciones, esta fuerza de empuje se obtiene a partir de un motor hidráulico. En este tipo de perforación, las pérdidas de energía en las barras y la boca son despreciables, por este motivo, la velocidad de penetración no varía apenas con la longitud del barreno. Para girar las barras y conseguir el par necesario, estas máquinas tienen un sistema de rotación montado habitualmente sobre un bastidor que se desliza a lo largo del mástil de la perforadora. El barrido del detritus de la perforación se efectúa con aire comprimido, para lo cual el equipo está dotado de uno o dos compresores ubicados en la sala de máquinas.
Figura 2. Perforación a rotación para estudios de terrenos
Empuje y elevación
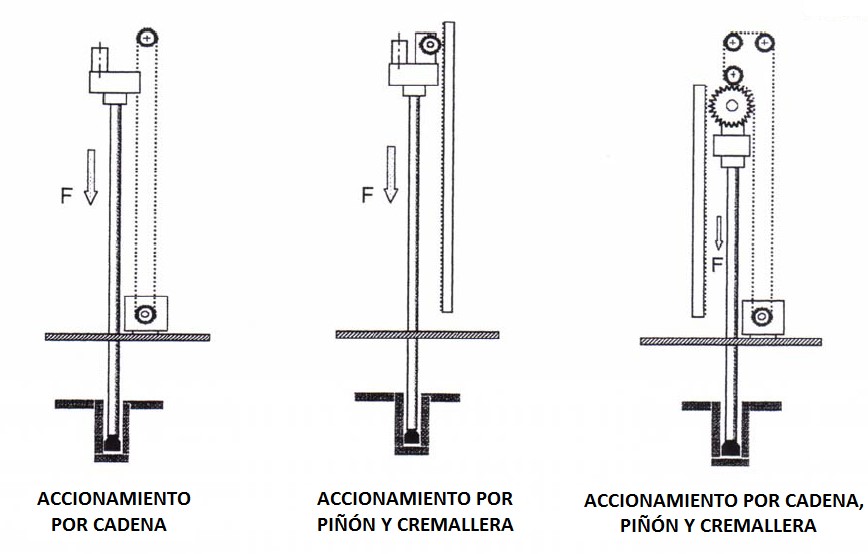
El empuje a aplicar dependerá de la resistencia del terreno y del diámetro de la perforación (Figura 3). El mecanismo de empuje está diseñado para aplicar una fuerza del orden del 50% del peso de la máquina, alcanzando los equipos de mayor tamaño un peso de unas 120 t. Los sistemas de empuje, además de proporcionar la presión suficiente sobre el fondo de la perforación, sirven para elevar y manipular el conjunto de varillas o barras que hay que añadir o quitar durante la ejecución de la perforación. Se pueden emplear sistemas mecánicos (por cadena o cremallera) o hidráulicos. Los sistemas hidráulicos están formados por dos cilindros combinados, son más potentes y fácilmente controlables.
Figura 3. Mecanismos de empuje y elevación
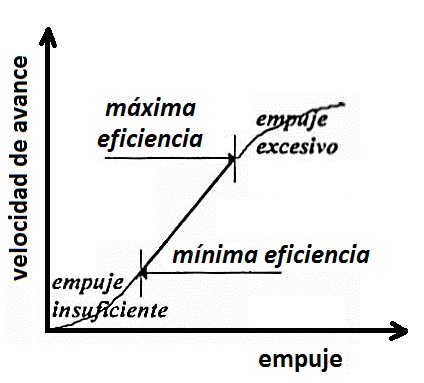
El empuje transmitido al fondo del taladro debe ser suficiente para que el efecto conjunto sobre la roca genere una tensión superior a su resistencia a compresión. Pero tampoco conviene un empuje excesivo que aumente el desgaste del equipo. La velocidad de penetración aumenta proporcionalmente al empuje hasta un límite a partir del cual el útil se agarrota y los insertos se incrustan en la roca. En estas condiciones, el desgaste aumenta considerablemente junto con un mayor consumo de energía y, si la roca es dura, puede producirse la rotura de los dientes del útil (Figura 4).
Figura 4. Relación velocidad de avance-empuje
Como suele ser habitual, os dejo unos vídeos al respecto.
Referencias:
DIRECCIÓN GENERAL DE CARRETERAS (1998). Manual para el control y diseño de voladuras en obras de carreteras. Ministerio de Fomento, Madrid, 390 pp.
INSTITUTO TECNOLÓGICO GEOMINERO DE ESPAÑA (1994). Manual de perforación y voladura de rocas. Serie Tecnológica y Seguridad Minera, 2ª Edición, Madrid, 541 pp.
MARTÍ, J.V.; YEPES, V.; GONZÁLEZ, F.; ALCALÁ, J. (2012). Técnicas de voladuras y excavación en túneles. Editorial de la Universitat Politècnica de València. Ref. 530, 165 pp.
UNIÓN ESPAÑOLA DE EXPLOSIVOS (1990). Manual de perforación. Rio Blast, S.A., Madrid, 206 pp.
Cuando se utilizan lodos tixotrópicos para el sostenimiento de la perforación, o estamos ante la presencia de agua, la barrena helicoidal no puede retirar el material, pues éste se escurre entre los pasos de ésta. En estos casos se emplea la perforación rotativa con cazo (bucket auger boring).
La perforadora con cazo rotativo utiliza un accionamiento mecánico o hidráulico que hace girar una Kelly que se fija a la cuchara. Para perforar, la cuchara gira para permitir que la parte inferior de los dientes de corte llene la cuchara. Las aletas en el fondo de la cuchara se cierran para mantener los detritus en su interior. El fondo de la cuchara es abatible (Figura 1) para permitir el vertido de la excavación.
La perforación con cazo es más lenta, con rendimientos previstos pueden ser la mitad (40-50 m/turno) de los conseguidos con hélices. Si bien es cierto que pueden triplicar los alcanzados con cuchara de valvas. Existen variantes de cazo con dientes de tierra, con dientes de widia, de fondo plano, se entrada simple, doble, etc.
Este sistema presenta algunos inconvenientes, además de los asociados a la perforación con lodos. Cuando se extrae el cazo se ejerce cierta succión que puede inestabilizar las paredes. Este efecto es particularmente sensible con diámetros de 500 mm o menos, por lo que lo habitual es perforar con cazo por encima de los 600 mm de diámetro.
Figura 2. Cazo rotativo
Os dejo algunos vídeos que ilustran la forma de trabajar con este tipo de perforación rotativa.
En el siguiente vídeo de Keller se muestra la perforación de un pozo de gran diámetro mediante cazos de diámetros sucesivamente mayores. Previamente se ha realizado una pantalla de pilotes secantes.
Referencias:
INSTITUTO TECNOLÓGICO Y MINERO DE ESPAÑA (1994). Manual de perforación y voladura de rocas. Ed. IGME. Madrid, 500 pp.
YEPES, V. (2014). Maquinaria para sondeos y perforaciones. Apuntes de la Universitat Politècnica de València, Ref. 209. Valencia.
Figura 1. Vibrohincador suspendido desde una grúa. Fuente: www.apevibro.com.mx
Los primeros vibrohincadores se utilizaron en la Unión Soviética en 1934, pero su empleo se popularizó a partir de los 50, cuando se perfeccionaron. Esta técnica se basa en la reducción de la fricción de las partículas del terreno por medio de vibraciones para facilitar la hinca del pilote o la tablestaca. El método es apropiado en suelos granulares, especialmente saturados, y en algunos cohesivos si están saturados. Es el método de hinca más económico si se dan las condiciones adecuadas, alcanzándose hasta 0,5 – 1,0 m de hinca por minuto, siendo más silenciosos que los martillos. Los efectos de la vibración dependen del tipo de suelo; así como la pérdida del rozamiento en la arena se consigue con frecuencias bajas (5 Hz), en las arcillas es necesaria una frecuencia superior. La hinca por vibración de pilotes y tablestacas se utiliza en la práctica en perfiles metálicos.
El vibrohincador se utiliza tanto en la hinca como en la extracción de pilotes con secciones abiertas en H, tubos de acero sin tapa en la punta y en tablestacas. Todas ellas son secciones donde existe un bajo desplazamiento del suelo. Sin embargo, con determinados tipos de suelos, sería posible incluso la hinca de pilotes de sección cerrada.
El funcionamiento del vibrohincador se basa en el movimiento de unas masas excéntricas cuya resultante es una oscilación vertical pura al girar a la misma velocidad pero en sentidos opuestos. Modifican la frecuencia de vibración en función del suelo; así, una alta frecuencia (20-40 Hz) proporciona una menor transmisión de vibraciones al entorno. La vibración se transmite a través de unas presillas o mordazas que sujetan el pilote o la tablestaca.
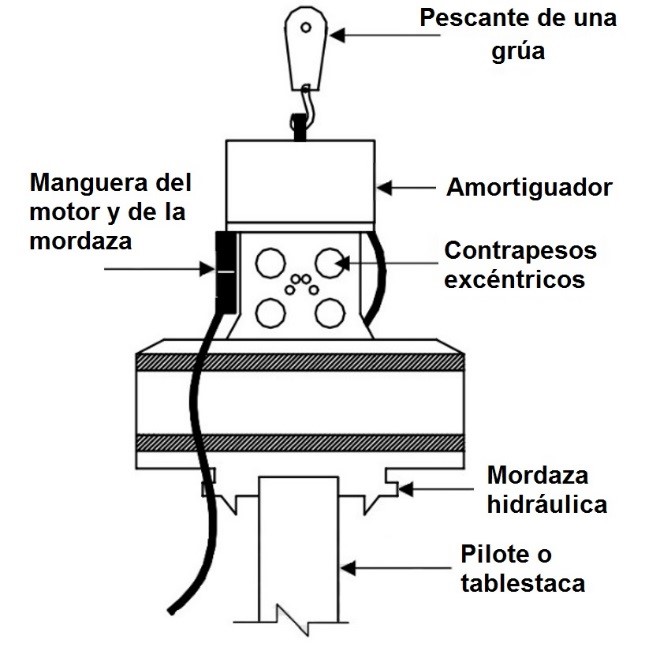
Figura 2. Esquema de un vibrohincador
El vibrador queda suspendido por grúa o sobre retroexcavadoras con mástil-guía para asegurar el guiado. La vibración no se transmite gracias a un amortiguador. Además, en el caso de la suspensión de una grúa, ha de cuidarse que cable de suspensión tenga longitud suficiente para evitar que la grúa acuse los efectos de la vibración. La extracción se puede realizar haciendo girar las excéntricas en sentido contrario.
Figura 3. Mordaza hidráulica para vibrohicador aplicado a un encamisado de pilote. Fuente: http://www.gandara.com.mx/maquinaria_accesorios.php
Hasta hace poco se utilizaban los vibradores eléctricos. Sin embargo, la tendencia actual son los vibradores hidráulicos, que con menor peso, permiten un reglaje continuo de la vibración. Los modelos recientes superan los 350 kW de potencia, con posibilidad de regular la amplitud y la frecuencia y por tanto, con la ventaja de adaptarse a diversos tipos de terreno. De hecho, los vibrohincadores se pueden clasificar atendiendo a su frecuencia de trabajo:
Vibrohincadores de baja frecuencia (5-10 Hz). Para pilotes de grandes secciones (hormigón y tubos ciegos de acero).
Vibrohincadores de frecuencia media (10 – 30 Hz). Para pilotes de acero de pequeña sección y tablestacas. Son los más frecuentes.
Vibrohincadores de alta frecuencia (> 30 Hz). Minimizan el impacto de las vibraciones en el entorno y estructuras vecinas.
Martillos resonantes (90 – 110 Hz). Inducen una respuesta resonante en el pilote. No son muy usados.
Martillos de impacto-vibración. De uso muy limitado, proporciona tanto una vibración vertical como impactos durante la hinca.
A continuación podéis ver un vídeo explicativo de lo anteriormente expuesto. Espero que os sea útil.
Os dejo a continuación algunos vídeos que ilustran el procedimiento constructivo.
Figura 1. Pilote roscado tipo Atlas (Franki). Fuente: http://www.geoforum.com/
Los pilotes roscados tipo “Atlas” y sus variantes son pilotes de desplazamiento hormigonados en obra (ver Figura 1). Presentan forma de tornillo y están diseñados para aprovechar al máximo la capacidad portante del terreno. El terreno se va compactando a la vez que se introduce el pilote. Al extraer la perforadora queda una perforación en forma de tornillo que maximiza la transmisión de esfuerzos a lo largo del fuste.
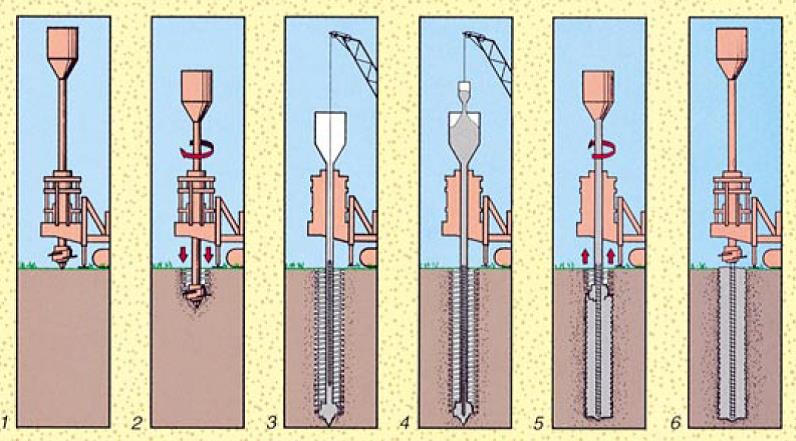
El proceso constructivo, tal y como se representa en la Figura 2, consta de las siguientes fases:
Puesta a punto y colocación de una punta perdida.
Penetración de la puntera en el terreno hasta la profundidad requerida.
Colocación de armaduras.
Retirada progresiva del útil de corte y perforación girando en sentido contrario y hormigonando el pozo desde el interior del útil.
Figura 2. Pilote roscado tipo Atlas (Franki). Fuente: http://www.geoforum.com/
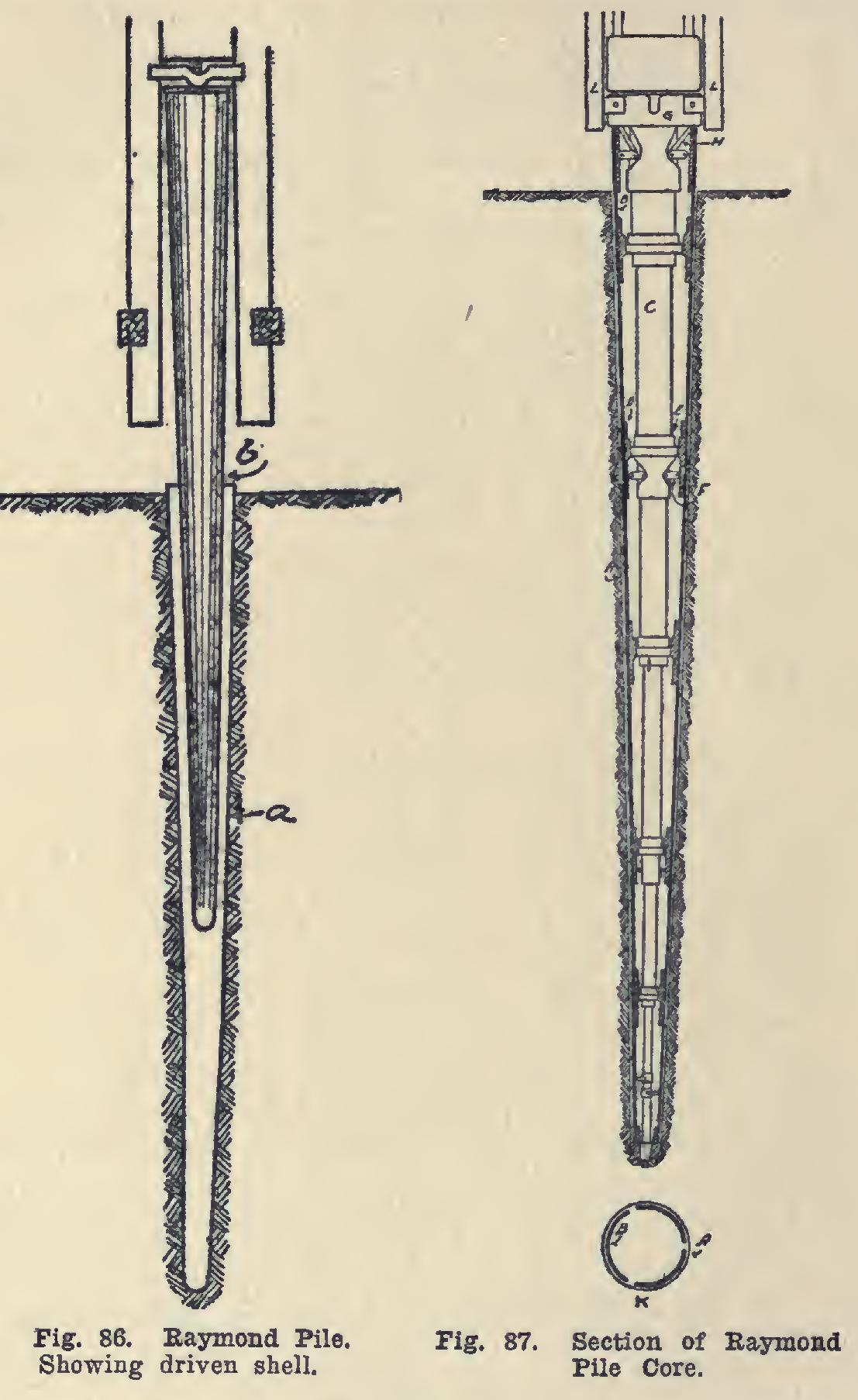
Figura 1. Hincado de pilote Raymond. Fuente: http://www.pilelineonline.com/devtt.htm
El pilote Raymond, inventado en 1897, es uno de los primeros con tubo de entibación, aunque se sigue utilizando en algunos países, especialmente en los Estados Unidos. Sin embargo, en países como España no se usa actualmente por no ser competitivo frente a otras soluciones. Está formado por varios tramos de tubo de acero de pared delgada, corrugado en espiral, de unos 20 cm de diámetro en la punta. Se enroscan tubos contiguos con longitudes normalizadas, de unos 2,5 m, hasta alcanzar la profundidad requerida. Forma, por tanto, un pilote cónico protegido en el fondo por un cierre resistente, que permite su hincado en terrenos de cierta cohesión.
Este pilote se puede hincar hasta profundidades de 40 m. Es capaz de soportar grandes cargas, de 400 a 750 kN, dependiendo del diámetro de la punta, a pesar del escaso diámetro debido a la forma troncocónica y la superficie lateral corrugada.
La hinca se realiza con un mandril solidario con el tubo, sobre el cual actúa la maza. El mandril es un vástago metálico que se introduce en este tipo de pilotes de acero huecos durante la hinca para evitar la abolladura. Realizada la hinca, se extrae el mandril del pilote y el tubo se rellena de hormigón, con o sin armadura. En la Figura 1 se aprecia el proceso previo de hinca de este tipo de pilote.
Figura 2. http://gluedideas.com/content-collection/Radfords-cyclopedia-of-construction-Vol-6-Concrete-Construction/Concrete-Pile-Foundations_P1.html
Figura 1. Hinca de pilote metálico. Fuente: http://codocsa.com/proyectos/
Los pilotes de acero presentan secciones pequeñas que producen poco desplazamiento del suelo durante la hinca, y por tanto, una modificación pequeña de la tensión del suelo contiguo. La hinca suele realizarse mediante el golpeo de la cabeza del pilote, protegido mediante un sombrerete que amortigua los golpes de la maza. Sin embargo, en suelos muy sueltos a veces se utiliza la inyección hidráulica o la vibración.
En función de la sección, los pilotes de acero hincados se clasifican normalmente en tres tipos:
Perfiles circulares: Son tubos de 0,20 a 1,00 m y longitudes de 10 a 15 m que se unen por soldadura, una vez colocados en la obra. Se pueden hincar con o sin tapa en la punta, pudiéndose rellenar posteriormente de hormigón, en cuyo caso remitimos a los pilotes de desplazamiento con tubo perdido.
Perfiles en H: Son secciones abiertas muy resistentes a compresión y flexión (ver Figura 1), por lo que absorben bien esfuerzos horizontales como los sismos. Resiste mejor los impactos del martinete que otras secciones y superan fácilmente los estratos duros, en parte porque desalojan poco material. A veces forman parte de pilotes entubados rellenos de hormigón.
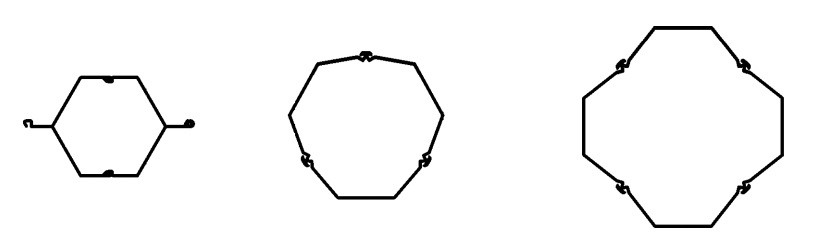
Perfiles tubulares: Formados por chapas de acero soldada o machihembrada (ver Figura 2), que forman un cajón de secciones diversas (tablestacas). Se emplean con su extremo inferior abierto o cerrado; en este último caso se trata de una entubación perdida que se rellena de hormigón.
Figura 2. Ejemplos de secciones transversales de tablestacas de acero. Fuente: EN-UNE 12699
A continuación dejamos un vídeo donde se puede ver la hinca de perfiles metálicos con martillo hidráulico.
Figura 1. Hinca inclinada de pilotes metálicos. Fuente: http://sheetpiling.arcelormittal.com/
Los pilotes metálicos hincados son pilotes de desplazamiento que empezaron a utilizarse en 1890. Actualmente son de acero, si bien en España prevalecen los pilotes de hormigón. Son perfiles laminados en caliente, con diversas secciones transversal y longitudinal. El transporte de estos elementos es sencillo y se pueden instalar nada más recibirlos en obra. Los pilotes metálicos se pueden agrupar atendiendo a su puesta en obra: pilotes hincados o pilotes roscados.
Su alta resistencia a compresión facilita atravesar los estratos duros; asimismo, son resistentes a flexión y cizallamiento, lo que permite la hinca inclinada sin riesgo de fisuración. Se alcanzan profundidades elevadas mediante soldadura o atornillado de tramos contiguos. Además, son fáciles de recuperar salvo que se les dote de algún dispositivo como unas aletas soldadas o anclajes.
Son pilotes relativamente costosos y la hinca puede ser ruidosa. Sin embargo, el principal inconveniente es la corrosión, especialmente en climas cálidos o con alternancia de humedad y sequedad. Para protegerlos se recubren de pinturas anticorrosivas y se sobredimensiona su sección para incluir el deterioro previsible. No obstante, el pilote metálico no suele plantear problemas cuando queda permanentemente bajo el agua, al igual que los de madera. Así lo corroboran numerosas obras marítimas cimentadas con estos elementos.
En sucesivas entregas describiremos los distintos tipos de pilotes metálicos: hincados (perfiles circulares, en H o tubulares), atornillados y de disco.
Os dejo esta presentación donde podéis conocer los aspectos básicos de este tipo de pilotes.
En este vídeo podemos observar la hinca de pilotes metálicos sobre el río Paranapura.
Figura 1. Protección de pilotes en contacto con agua marina. Fuente: http://www.dsimarineconstruction.com/piling-repair/
Los pilotes de madera son pilotes de desplazamiento. Este tipo de cimentación profunda empezó a utilizarse en la antigüedad. Hoy día son útiles en países con abundancia en este material, con la ventaja de ser baratos, ligeros y de fácil manejo. En España, si bien se utilizaron hasta los años 60, su uso actual es muy limitado, empleando troncos de entre 20 y 30 cm de diámetro de encina o eucalipto, si bien los de pino, abeto y roble mejoran la durabilidad por contener mucha resina.
Los pilotes de madera son útiles en cimentaciones provisionales de pequeñas estructuras, como base de terraplenes o para mejorar grandes extensiones de terreno. Trabajan mejor por fricción que por punta. Se usan maderas densas, que absorben flexiones y admiten ligeras desviaciones durante la hinca. Sin embargo, son elementos de pequeña capacidad portante, entre 150 y 250 kN, no debiéndose usar para cargas mayores. Además, para atravesar estratos duros es precisa una perforación previa.
Tampoco admiten variaciones de humedad salvo que se traten para evitar la pudrición y los ataques biológicos (ver Figura 1). Para proteger la madera se usaba el “creosotado”, un derivado del fraccionamiento de los alquitranes de la hulla con cualidades biocidas; sin embargo hoy está prohibido en la Unión Europea por su potencial cancerígeno. Los pilotes duran más tiempo si están permanentemente sumergidos, de 25 a 50 años en ambiente marino. Si se encuentran por encima del nivel freático y enterrados, pueden durar hasta 100 años.
Los pilotes de madera se hincan con equipos de percusión ligeros. Para evitar el astillamiento por la maza, la cabeza del pilote se refuerza con un zuncho o anillo metálico ajustado en caliente y a presión para que al enfriarse aprisione la madera por contracción. También la punta se disgrega con los golpes, por lo que se protege con una pieza metálica, “azuche”, bien centrada para evitar desviaciones durante la hinca (ver Figura 2). El azuchamiento debe realizarse con cuidado, de modo que la punta del azuche quede alineada con el eje, de forma que evite desviaciones en la hinca. Además se pueden unir tramos de pilotes con manguitos tubulares metálicos, pues sus longitudes máximas habituales son entre 10 y 20 m.
Figura 2. Protección metálica de punta de pilote de madera. Fuente: http://listado.mercadolibre.com.ar/antiguedades/pilotes-y-armaduras-de-hierro
Os dejo un vídeo de la empresa Maquinarias JACANO donde se puede ver la hinca de maderos de eucalipto con una vibro.
A continuación os dejo un vídeo donde se observa cómo se coloca este tipo de pilote en zonas con muy pocos medios auxiliares.
Para aquellos que queráis mayor información sobre los pilotes de madera, os dejo información de AITIM (Asociación de Investigación Técnica de las Industrias de la Madera).