En ingeniería, las cargas que actúan sobre una estructura se clasifican en dos tipos principales: estáticas y dinámicas, según si permanecen constantes o varían con el tiempo.
Una carga estática se aplica lentamente y no produce efectos vibratorios ni dinámicos en la estructura. Es decir, la carga aumenta gradualmente desde cero hasta alcanzar su valor máximo y, a partir de ahí, permanece constante. Un ejemplo de carga estática típica es el peso de un objeto colocado cuidadosamente sobre una superficie.
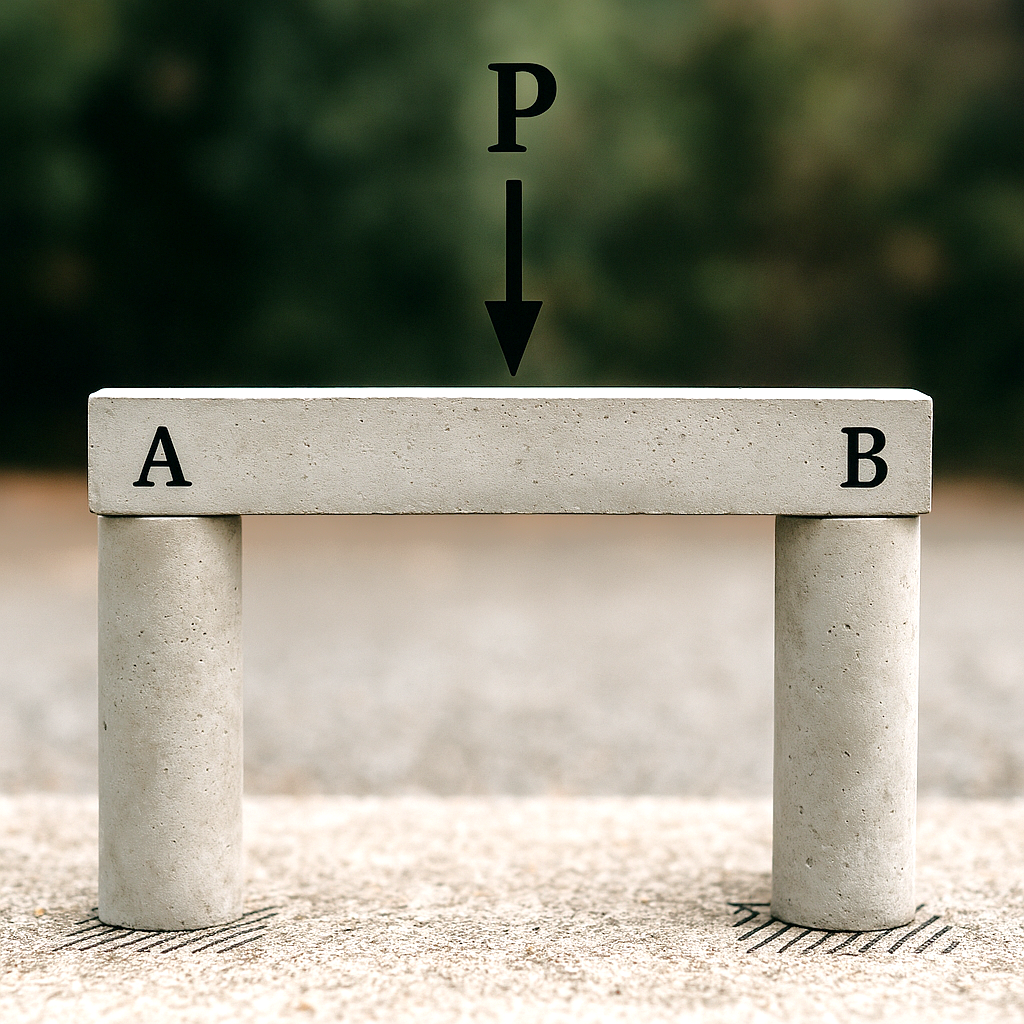
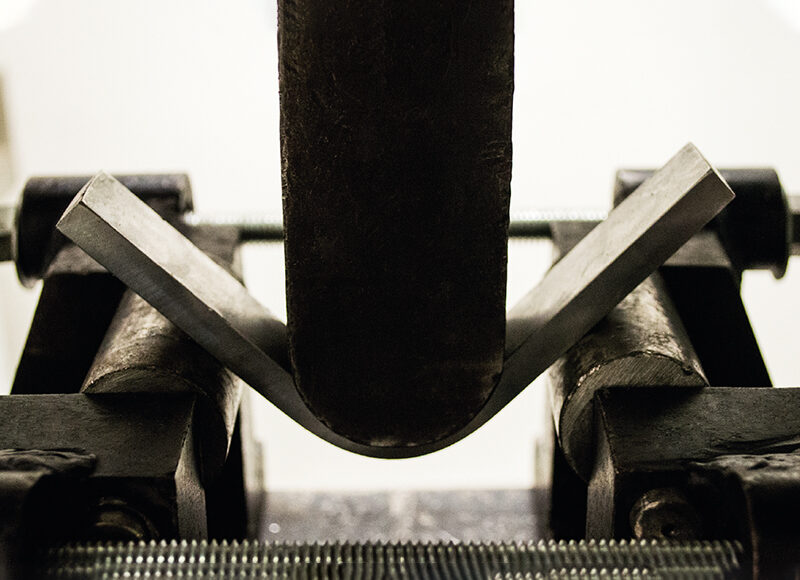
Por su parte, las cargas dinámicas pueden adoptar muchas formas y comportarse de manera más compleja. Algunas se aplican y se retiran de forma repentina, como las cargas de impacto, mientras que otras persisten durante periodos largos y varían continuamente de intensidad, y se conocen como cargas fluctuantes. Las cargas de impacto se producen, por ejemplo, cuando dos objetos colisionan o cuando un objeto en caída golpea una estructura (Figura 1). En cambio, las cargas fluctuantes suelen estar asociadas a maquinaria rotatoria, tránsito de vehículos, ráfagas de viento, olas del mar, movimientos sísmicos o procesos industriales de fabricación. La carga dinámica sobre un cuerpo se puede considerar como una carga aplicada en forma estática multiplicada por un factor de mayoración.
Muchos elementos de las máquinas están sometidos a cargas variables que cambian de intensidad con el tiempo. El comportamiento de los materiales sometidos a este tipo de carga es muy diferente del que presentan frente a cargas estáticas. Por ejemplo, una pieza que puede soportar sin problemas una gran carga estática podría fallar si se le aplica una carga mucho menor, pero repetida un gran número de veces.
Las cargas variables generan esfuerzos alternantes en el material que tienden a producir pequeñas grietas en su superficie. Con cada repetición de la carga, estas grietas se van propagando poco a poco hasta que finalmente se produce la rotura total de la pieza. A este fenómeno, en el que la acumulación de daños por cargas repetidas provoca la fractura, se le conoce como fatiga.
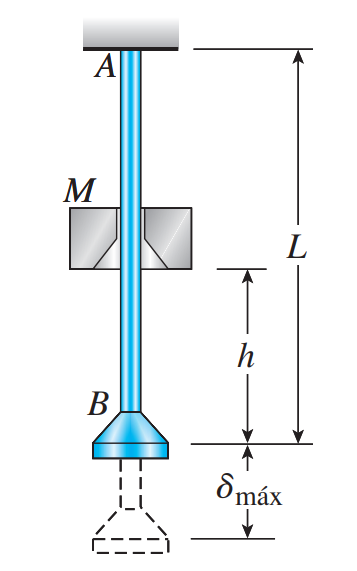
Para ilustrar cómo responde una estructura ante una carga dinámica, analicemos un caso sencillo, pero revelador: el impacto de un objeto que cae sobre el extremo inferior de una barra prismática (Figura 2). Supongamos que un collarín con masa , inicialmente en reposo, se deja caer desde una altura hasta chocar contra una brida fija al extremo inferior de la barra.
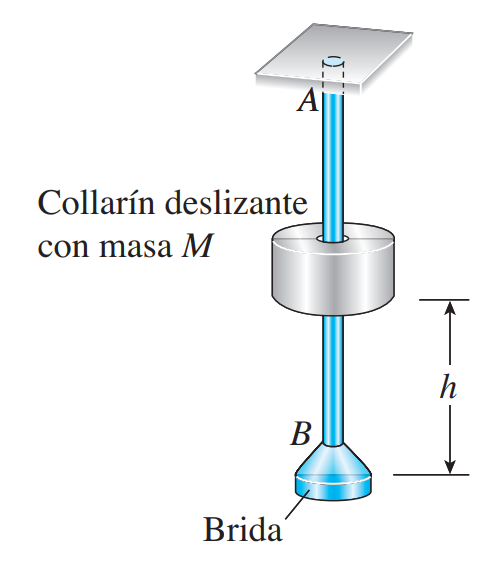
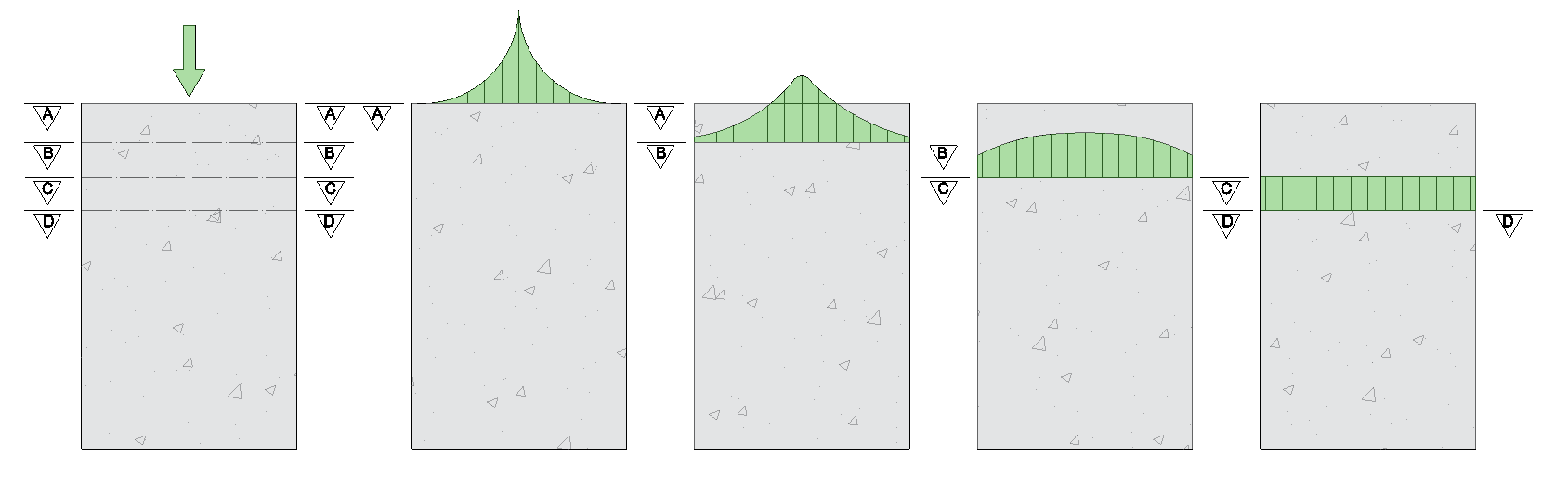
Cuando el collarín golpea la brida, la barra comienza a alargarse debido a que el impacto genera esfuerzos axiales internos. En un intervalo muy breve, del orden de algunos milisegundos, la brida desciende y alcanza su posición de desplazamiento máximo. A partir de ese momento, la barra comienza a vibrar longitudinalmente: primero se acorta, después se alarga, luego se vuelve a acortar y así sucesivamente, con el extremo inferior oscilando hacia arriba y hacia abajo.
Estas vibraciones son similares a las que se observan cuando se estira y suelta un resorte o cuando una persona salta con una cuerda elástica atada al tobillo. No obstante, estas vibraciones no persisten indefinidamente, ya que el material presenta efectos de amortiguamiento que hacen que se atenúen rápidamente y la barra finalmente quede en reposo con la masa M apoyada sobre la brida.
Es evidente que la respuesta de la barra al impacto del collarín es bastante compleja. Un análisis completo y preciso requiere recurrir a técnicas matemáticas avanzadas para describir el fenómeno en detalle. Sin embargo, es posible obtener una aproximación útil utilizando el concepto de energía de deformación y formulando algunas suposiciones simplificadoras.
-
Antes de liberar el collarín, este se encuentra a una altura sobre la brida y posee una energía potencial gravitatoria:
![]()
donde es la aceleración de la gravedad.
-
A medida que cae, la energía potencial se convierte en energía cinética. Justo al impactar, toda la energía es cinética:
![]()
siendo n=√(2 · g · h) la velocidad del collarín en el momento del choque.
Durante el impacto, la energía cinética del collarín se transforma en otras formas de energía. Una parte se convierte en energía de deformación cuando la barra se estira. Otra parte se disipa en forma de calor y mediante deformaciones plásticas locales tanto en el collarín como en la brida. Además, una pequeña fracción de la energía permanece como energía cinética residual en el collarín, que puede seguir moviéndose hacia abajo mientras está en contacto con la brida e, incluso, rebotar hacia arriba.
Para simplificar el análisis de esta situación tan compleja, haremos algunas idealizaciones y asumiremos las siguientes condiciones:
-
Supondremos que el collarín y la brida están diseñados de manera que, tras el impacto, el collarín «se pega» a la brida y se desplaza hacia abajo con ella. Es decir, asumimos que no hay rebote. Este comportamiento es más probable cuando la masa del collarín es mayor que la de la barra.
-
Ignoraremos todas las pérdidas de energía y supondremos que toda la energía cinética del collarín al caer se transforma por completo en energía de deformación de la barra. Esta simplificación da como resultado esfuerzos mayores de los que realmente se producirían si se tuvieran en cuenta las pérdidas de energía.
-
No tendremos en cuenta los cambios en la energía potencial de la barra debidos a su movimiento vertical ni la energía de deformación asociada a su propio peso. Ambos efectos son extremadamente pequeños y pueden ignorarse.
-
Supondremos que los esfuerzos en la barra se mantienen dentro del rango linealmente elástico, es decir, que no se produce deformación plástica en la barra.
-
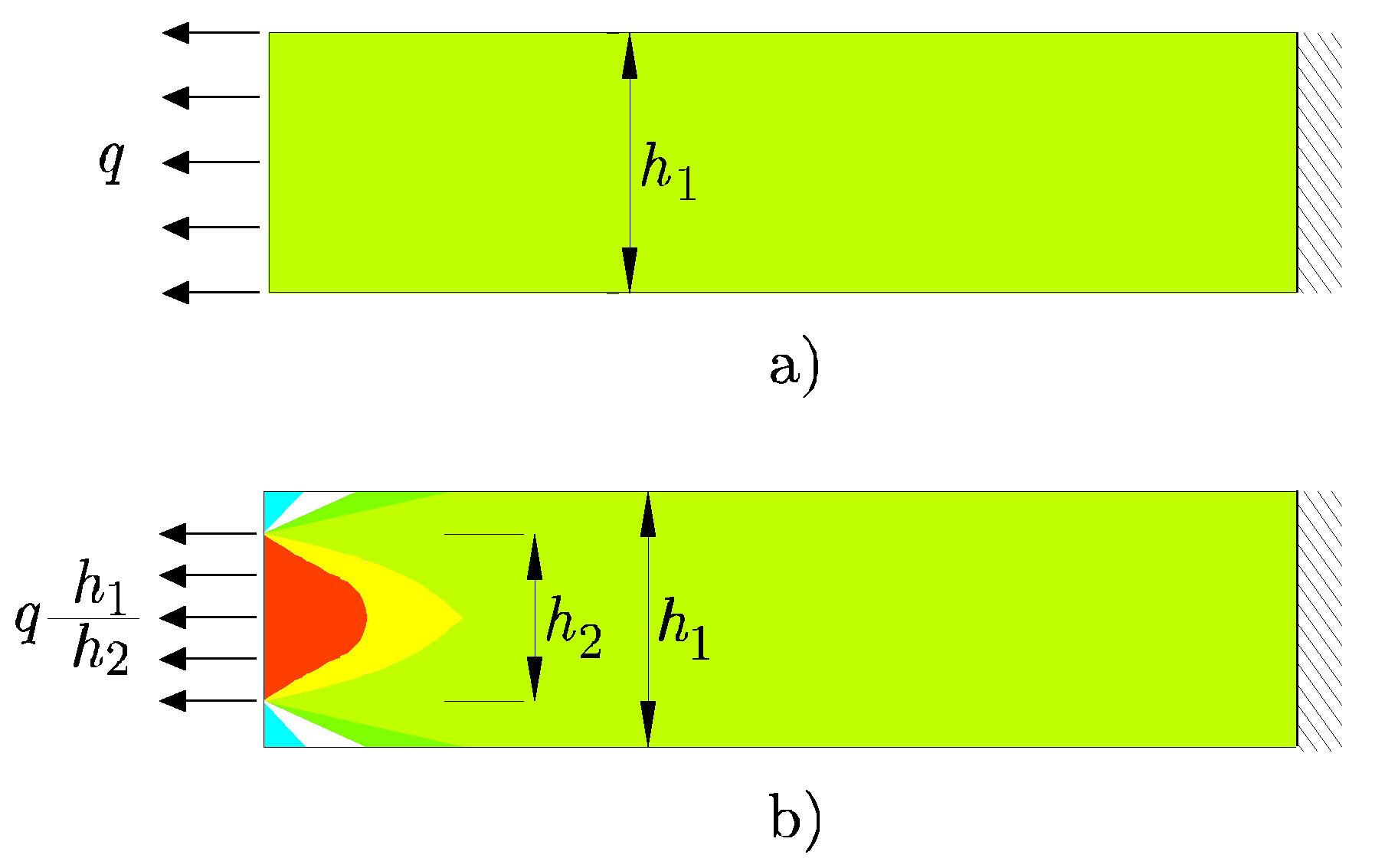
Consideraremos que la distribución de esfuerzos en toda la barra es la misma que si estuviera sometida a una carga estática en su extremo inferior, es decir, que los esfuerzos son uniformes en todo el volumen de la barra. En realidad, las ondas de esfuerzo longitudinal que se propagan por la barra causan variaciones en la distribución del esfuerzo, pero aquí las despreciaremos para simplificar el análisis.
Con estas suposiciones, podemos calcular el alargamiento máximo de la barra y los esfuerzos de tensión máximos producidos por la carga de impacto. Hay que recordar que en este análisis no se tiene en cuenta el peso de la barra y que únicamente se evalúan los esfuerzos generados por la caída del collarín.
Este análisis energético, aunque simplificado, permite comprender los principios fundamentales que rigen la respuesta de las estructuras ante una carga de impacto, así como las vibraciones que se generan y la forma en que se amortiguan hasta que la estructura alcanza un nuevo estado de equilibrio.
En este tipo de análisis, asumimos que no hay pérdidas de energía durante el impacto. Sin embargo, en la realidad estas pérdidas siempre están presentes y, por lo general, se disipan en forma de calor y mediante deformaciones localizadas en los materiales. Por tanto, la energía cinética del sistema es menor inmediatamente después del impacto que antes de este. Esto significa que la barra se deforma menos de lo que predice nuestro análisis simplificado. Por lo tanto, el desplazamiento real del extremo de la barra (como se muestra en la Figura 3) es menor que el calculado en el modelo idealizado.
También supusimos que los esfuerzos en la barra permanecían siempre dentro del límite de proporcionalidad, es decir, en el rango elástico. Si el esfuerzo máximo sobrepasa este límite, la relación entre el alargamiento de la barra y la fuerza axial deja de ser lineal y el análisis se vuelve mucho más complejo.
Además, hay otros factores que influyen en la respuesta real de la estructura y que no hemos tenido en cuenta en el modelo, como las ondas de esfuerzo que se propagan a lo largo de la barra, el amortiguamiento y las posibles imperfecciones en las superficies de contacto. Por estas razones, debemos tener presente que todas las fórmulas y resultados obtenidos bajo estas suposiciones son válidos solo en condiciones muy idealizadas y tienden a sobreestimar el alargamiento real de la barra.
Por otro lado, los materiales dúctiles, es decir, aquellos que pueden deformarse considerablemente más allá del límite de proporcionalidad, ofrecen una mayor resistencia frente a las cargas de impacto que los materiales frágiles. También es importante recordar que las barras con ranuras, agujeros u otras concentraciones de esfuerzo son muy vulnerables al impacto: incluso un golpe ligero puede causar una fractura, aunque el material sea relativamente dúctil bajo cargas estáticas.
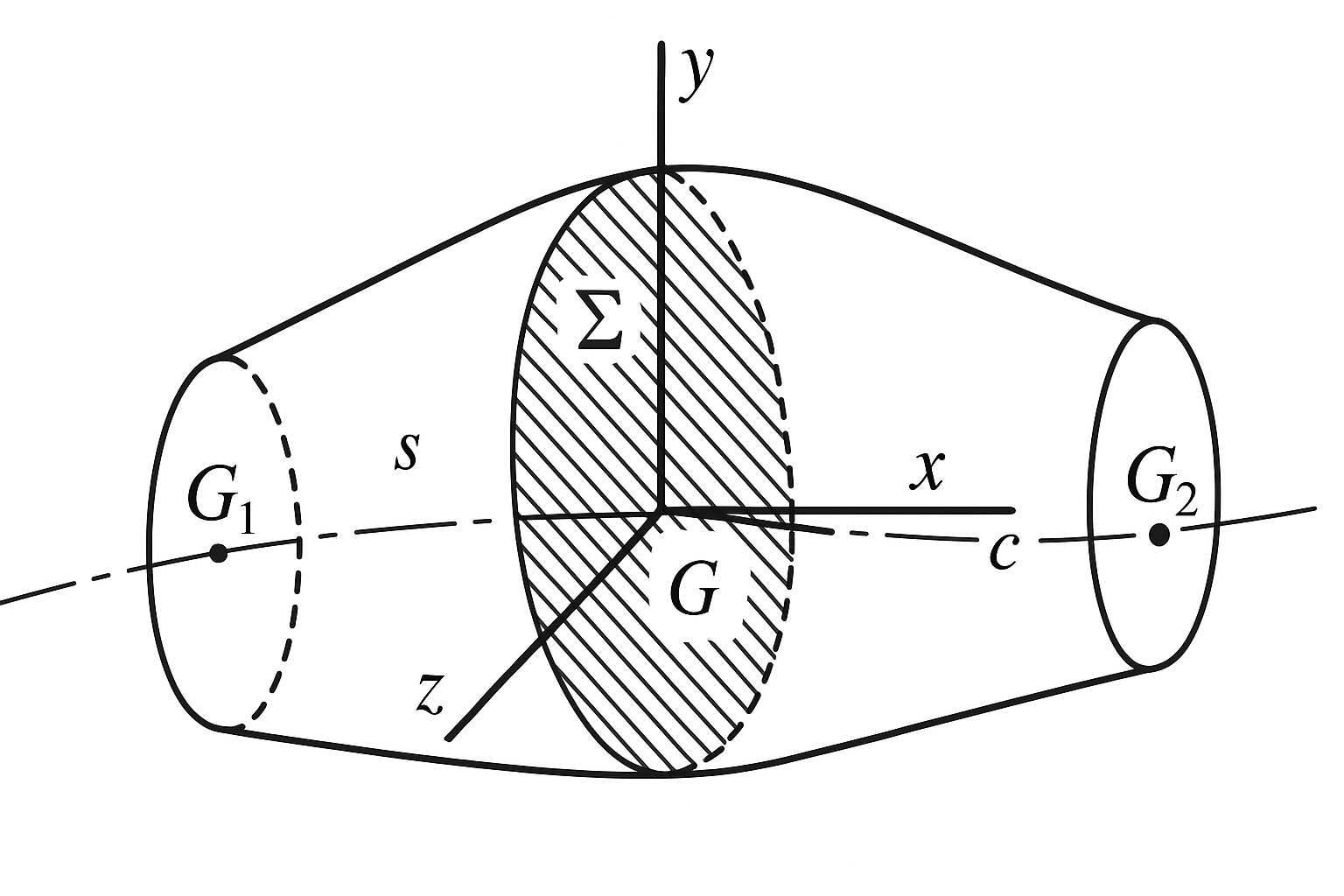
Por tanto, para resistir con más eficacia una carga de impacto, un elemento estructural debe tener un gran volumen, estar fabricado con un material que tenga un módulo de elasticidad bajo y una alta resistencia a la fluencia, y tener una forma que permita distribuir los esfuerzos de manera uniforme por todo el elemento.
Para un análisis más profundo, recomendamos al lector consultar alguna referencia como las que dejamos a continuación.
Referencias:
Beer, F.P.; Johnston, J. E.; DeWolf, J.T.; Mazurek, D.F. (2017). Mecánica de Materiales. Séptima edición, McGraw Hill, México.
Gere, J. M., & Goodno, B. J. (2009). Mecánica de materiales. Séptima edición, Cengage Learning Editores, S.A. de C.V., México.