
Quisiera felicitar públicamente a nuestro estudiante de doctorado, Mehrdad Hadizadeb-Bazaz, por el Premio al mejor trabajo en la modalidad de póster, otorgado por la Escuela de Doctorado de la Universitat Politècnica de València, en el VIII Encuentro de Estudiantes de Doctorado. Tengo el honor y el placer de dirigir su tesis doctoral junto con el profesor Ignacio J. Navarro. El trabajo se enmarca en el proyecto de investigación HYDELIFE, que dirijo como investigador principal.
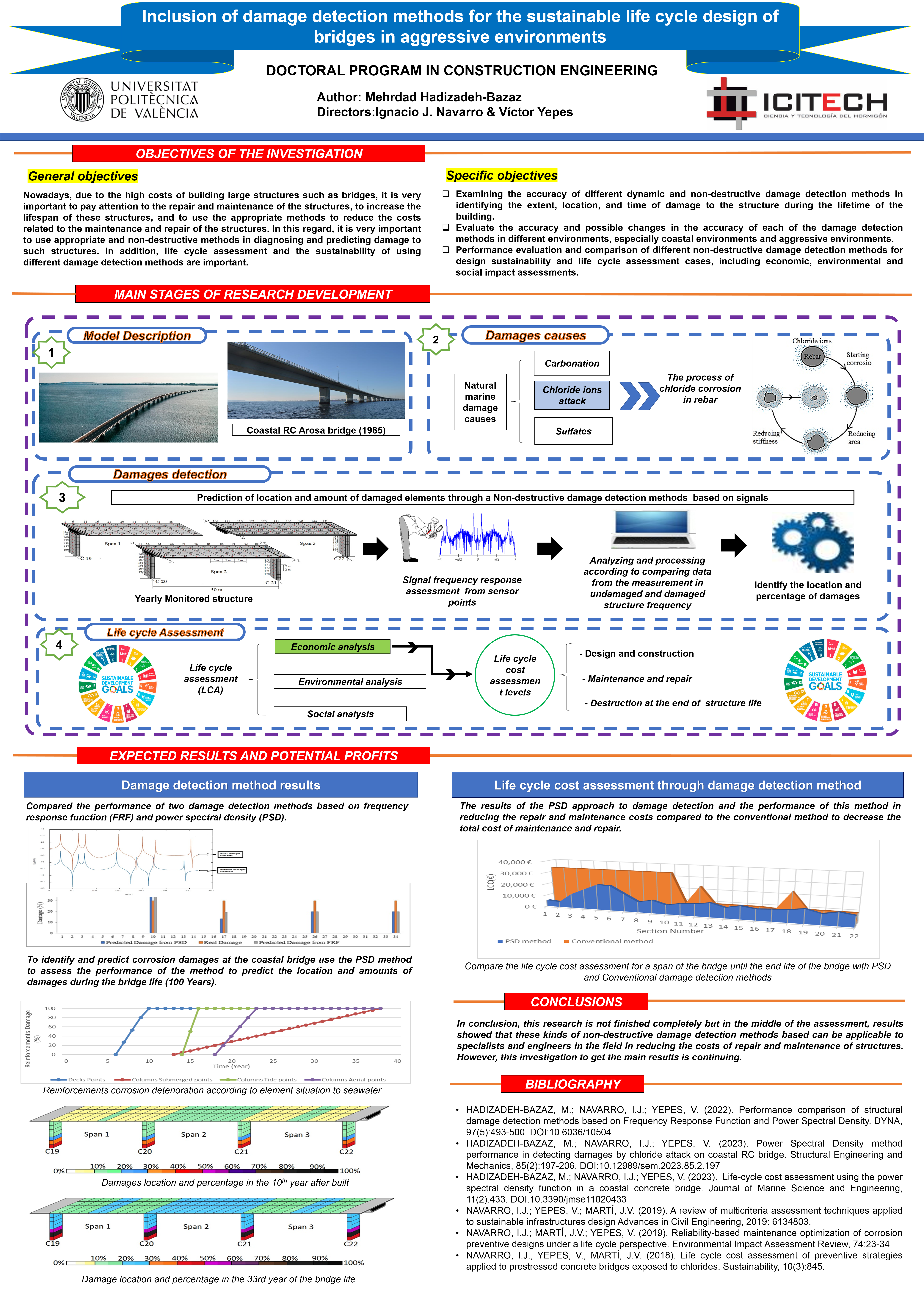
En la actualidad, debido a los altos costos de construir grandes estructuras como puentes, resulta sumamente importante prestar atención a la reparación y mantenimiento de dichas estructuras, con el fin de aumentar su vida útil y utilizar los métodos adecuados para reducir los costos asociados a su mantenimiento y reparación. En este sentido, resulta crucial emplear métodos apropiados y no destructivos para diagnosticar y predecir los daños en estas estructuras. Además, es importante considerar la evaluación del ciclo de vida y la sostenibilidad de los distintos métodos de detección de daños.
En este estudio, se examina la precisión de diversos métodos de detección de daños, tanto dinámicos como no destructivos, para identificar la magnitud, la ubicación y el momento en que se produce el daño en la estructura a lo largo de su vida útil. Se evalúan la precisión y las posibles variaciones de cada uno de los métodos de detección de daños en distintos entornos, especialmente en entornos costeros y agresivos. Además, se realiza una evaluación del desempeño y la comparación de diferentes métodos de detección de daños no destructivos, teniendo en cuenta los casos de sostenibilidad de diseño y la evaluación del ciclo de vida, incluyendo aspectos económicos, ambientales e impactos sociales.

Os dejo el póster completo para que lo podáis leer.

Esta obra está bajo una licencia de Creative Commons Reconocimiento-NoComercial-SinObraDerivada 4.0 Internacional.