Figura 1. Compactadores de Suelos Vibratorios de la serie GC de Cat®. Fuente: https://www.cat.com/es_MX/campaigns/npi/Compactadores-de-Suelo-Vibratorios-de-la-SerieGC.html
Son máquinas caracterizadas por transmitir el esfuerzo de compactación al terreno mediante la vibración de una masa, que puede ser un cilindro o un bloque aislado. La primera máquina de este tipo se empleó en Alemania en los años 30: era una bandeja vibratoria autopropulsada.
Estos equipos combinan los esfuerzos estáticos con los dinámicos. Eliminan en gran medida la fricción interna entre las partículas del suelo y mejoran la compactación. El resultado es mejor en terrenos granulares que en terrenos cohesivos. Otro efecto es el despegue del rodillo del suelo debido al impacto que este ejerce por la vibración. Todo ello ha propiciado mayores rendimientos que la compactación estática, pudiendo compactarse tongadas de mayor espesor. La acción de un rodillo vibrante equivale a la de otro estático de mucho mayor peso, según el material a compactar. Como idea orientativa, esta equivalencia es de 12 en gravas y escollera y de 8 en suelos cohesivos.
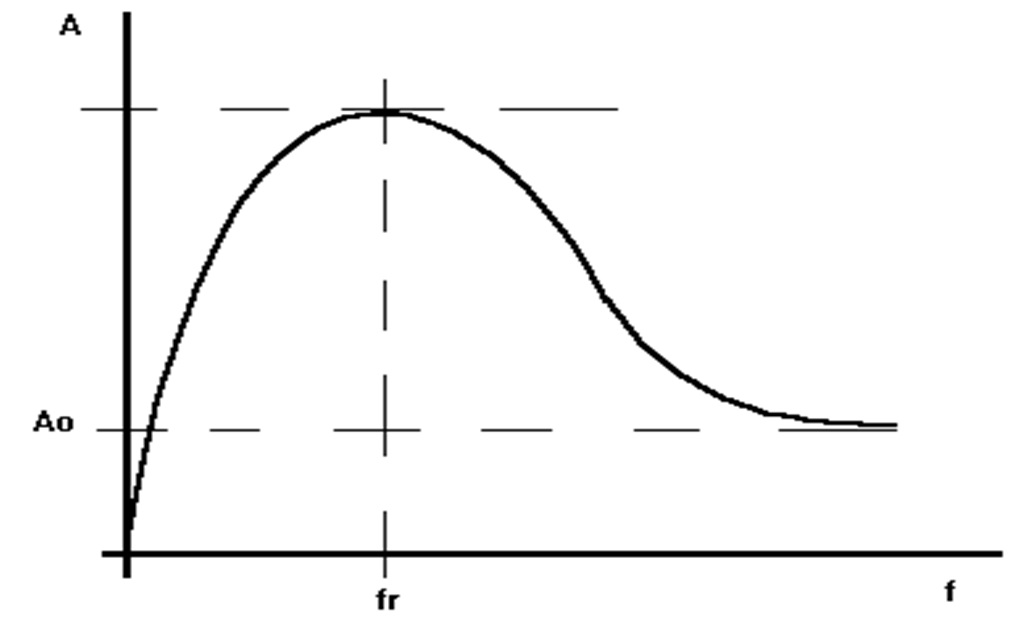
El número de impulsos ejercidos por unidad de tiempo se denomina frecuencia y se expresa en ciclos por segundo. La distancia máxima que recorre la masa vibrante desde su posición de equilibrio se denomina amplitud.
La energía que el rodillo transmite al suelo depende no solo de su masa, sino también de la amplitud alcanzada por la oscilación. Esta amplitud está relacionada con la frecuencia, y ambas crecen hasta alcanzar la frecuencia natural o de resonancia del sistema suelo-rodillo. Posteriormente, disminuye asintóticamente la amplitud hasta el límite nominal del rodillo.
Figura 2. Frecuencia-amplitud. A0 : Amplitud nominal del rodillo, fr : Frecuencia de resonancia
Al emplear el mismo compactador, la frecuencia natural aumenta a medida que aumenta la densidad y disminuye la compresibilidad del terreno. Algunas máquinas utilizan este fenómeno para evaluar el grado de compactación. Por ello, a medida que se dan pases del cilindro sobre el relleno, varía la frecuencia de resonancia y, por consiguiente, para seguir compactando en condiciones óptimas se tendrá que modificar en cada pasada la frecuencia de vibración, incrementándola. El asiento aumenta con rapidez al acercarse a la frecuencia natural, y es superior al producido por una carga estática de la misma magnitud que la fuerza vibratoria. Se llama zona crítica de frecuencias a la zona donde se produce el mayor asiento y se extiende normalmente entre 0,5 y 1,5 veces la frecuencia natural.
La fuerza total aplicada sobre el suelo depende de la componente vertical de la fuerza centrífuga de la masa excéntrica, que varía de forma sinusoidal, y del peso del cilindro. Puede “despegar” el rodillo del suelo en determinadas circunstancias y añadir una acción de “impacto” sobre el terreno, consiguiéndose cierto efecto en la “profundidad” de la compactación.
La amplitud de la vibración influye en el reparto de densidades en profundidad. De este modo, las amplitudes bajas dan valores más altos en superficie y las altas, en el fondo.
Como regla válida en un gran número de casos, se puede decir que los materiales granulares se compactan mejor con frecuencia alta y amplitud reducida, mientras que para los cohesivos es preferible mayor amplitud y menor frecuencia.
Estas circunstancias implican que, en un rodillo vibrante, se debe:
Utilizar la máxima amplitud posible, acorde con el tipo de relleno a compactar.
Tener un dispositivo de ajuste de frecuencias para acercarse a la frecuencia de resonancia.
Disponer una suspensión elástica en la máquina que debe aislar al menor costo el chasis del elemento vibrador.
Son idóneos en arenas y gravas sin finos y en terrenos húmedos cohesivos. No son adecuados para limos y arcillas, suelos con un 5% o más de finos, ni para suelos secos.
Generalmente, el efecto en profundidad con los rodillos vibratorios es mayor en el lado húmedo que en el seco, y más importante cuanto más arcilloso es el material.
Os dejo algún vídeo de este tipo de maquinaria.
También les dejo un folleto de la empresa Caterpillar sobre sus compactadores de suelos vibratorios de un solo tambor.
Figura 1. Compactador de neumáticos remolcado. https://www.conquestattachments.com/wobbly-compactors
Los compactadores remolcados de neumáticos no son de uso habitual. Está formando dos ejes de 7 ruedas, 3 delante y 4 detrás. Su peso oscila sobre las 10 t, no superando la presión de inflado las 0,4 MPa.
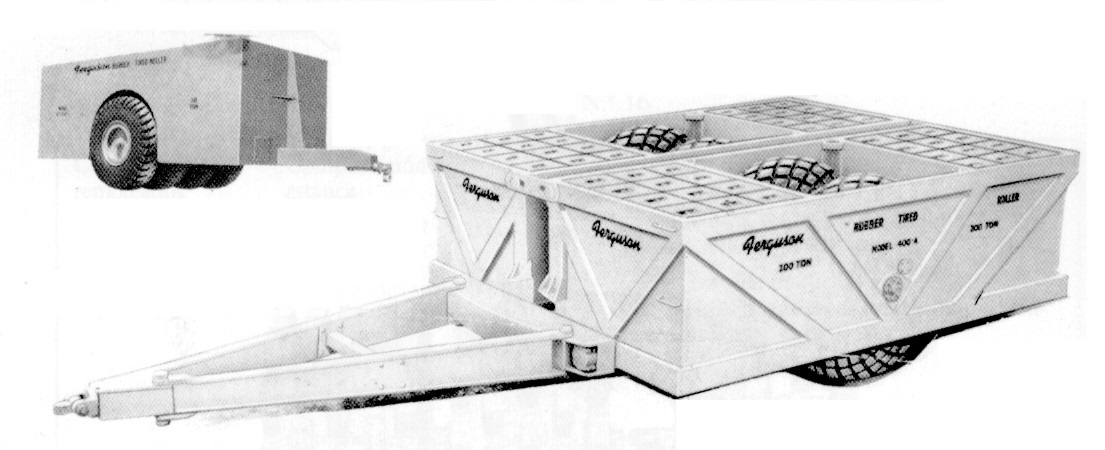
Un caso especial son los supercompactadores. Consisten en una caja lastrable que puede sobrepasar las 50 t, llegando a las 200 t. Tienen un solo eje con dos o cuatro ruedas de gran tamaño, con una presión de inflado de hasta 1,0 MPa, rellenándose parcialmente de líquido para reducir el peligro de posibles reventones. El sistema de suspensión debe permitir que cada neumático soporte la misma carga, aunque actúen sobre superficies irregulares. Se utilizan en suelos arenosos, gravas y otros ligeramente cohesivos. Son muy robustos y de escaso entretenimiento. Necesitan grandes superficies para ser rentables, por lo que se usan cada vez menos por falta de maniobrabilidad en los tajos, aunque son exigidas por algunas administraciones, especialmente para detectar fallos y recibir obras.
Figura 2. Supercompactador
El PG-3 define en su artículo 304 la prueba con supercompactador. A una velocidad entre 4 y 8 km/h, el supercompactador señala la presencia de zonas inestables, que deben corregirse mediante un escarificado previo y una compactación adicional.
Figura 1. Compactación de suelos con compactador de neumáticos. http://www.corinsa.es/tecnologia/compactacion/compactacion-de-tierras/
Los compactadores de neumáticos normalmente se utilizan en la compactación de mezclas asfálticas, pero también se emplean en la densificación de tierras (Figura 1). En el caso de la compactación de firmes, es importante la suavidad en los arranques y en la inversión de marchas. Estos equipos combinan el efecto estático, con el de amasado, debido a la deformación de los neumáticos en contacto con la superficie. De este modo las partículas ni se rompen ni se aplastan.
Se llama presión de contacto PCal cociente entre la carga por rueda P y el área de contacto del neumático, variable con la deformabilidad del suelo. La diferencia entre considerar rígida o deformable la superficie de apoyo puede dar resultados para la presión de contacto de igual al doble. La variación de PC no es grande, debido a que un aumento de P, también incrementa el área de contacto.
La presión de inflado Pitiene una influencia superior en la compactación, ya que un aumento de Pi supone una disminución del área de contacto, y por tanto una mayor presión de contacto. Esta presión suele variar entre 0,4 y 0,7 MPa.
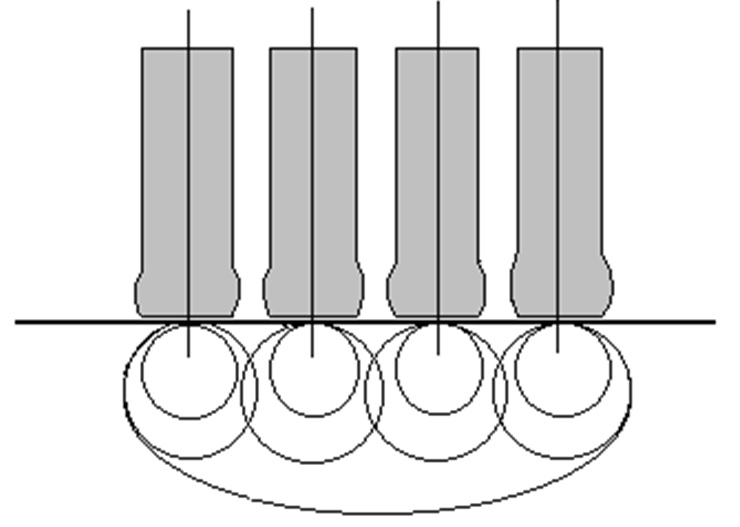
La carga por rueda P, influirá sobre todo en la profundidad a la que llegue el esfuerzo de compactación, según podemos comprobar en la Figura 2.
Figura 2. Superposición de bulbos de presión
Para que la compactación sea efectiva no es apropiado que las capas tengan un espesor superior a 1,5 – 2 veces el radio del área de contacto, por lo que suelen ser de 20-40 cm.
A efectos prácticos, se conseguirá la máxima compactación superficial subiendo la presión de inflado, mientras que incrementando la carga por rueda, el área de contacto, o ambas, se aumentará el efecto en profundidad. Tanto si se incrementa la carga por rueda como la presión de inflado, se consigue un peso específico seco máximo más alto, con el correspondiente descenso en el contenido de humedad óptimo.
Los neumáticos con dibujo dotan de mayor adherencia a la máquina y ejercen cierta acción de amasado (Figura 3). Caso de no querer dejar huella, o cuando se descompacten los dos o tres primeros centímetros de la capa, es preferible el neumático liso, tal y como se utiliza para compactar aglomerados asfálticos.
Figura 3. Compactador con neumáticos con dibujo. http://www.corinsa.es/tecnologia/compactacion/compactacion-de-tierras/
Los compactadores de neumáticos se prestan bien a cambios en su carga total y presión de contacto para adaptarlos a cada caso. La velocidad de traslación adecuada es algo mayor que en los compactadores de «pata de cabra«. Por otro lado, la máxima compactación se consigue en la superficie.
Estos compactadores son especialmente eficaces con los suelos algo cohesivos, y también suelen ser eficientes en rellenos compuestos de limos poco plásticos, comportándose peor en suelos granulares sin cohesión, en concreto los de granulometría uniforme. Tampoco son adecuados en arcillas muy blandas o en suelos de consistencia muy variable.
Se aconseja una presión de inflado máxima compatible con el estado de la superficie del terreno, ya que en caso de estar blando es posible que las ruedas patinen, por lo que se recomienda una menor presión de inflado para aumentar la superficie adherente. En cambio, cuando se exige un buen acabado superficial, puede ser perjudicial una fuerte presión que puede dejar huellas de importancia que no puedan ser borradas en pasadas posteriores de un rodillo.
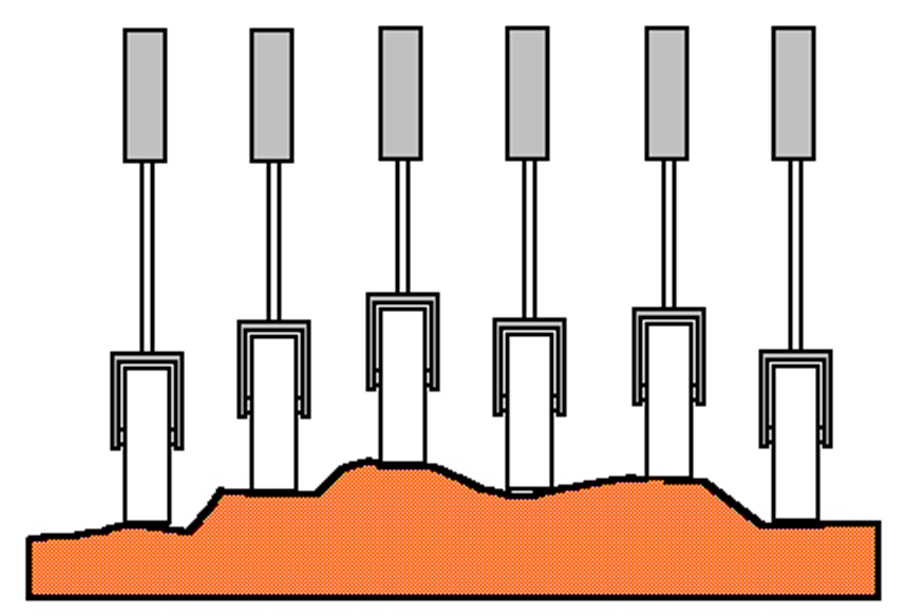
Otra condición imprescindible sería la del isostaticismo del rodillo (ver Figura 4). Para conseguir una buena homogeneidad del trabajo es preciso que cada rueda transmita al suelo la misma fuerza, cualquiera que sea la desigualdad existente.
Figura 4. Sistema de suspensión isostática
Por consiguiente, un compactador de ruedas neumáticas deberá cumplir las siguientes condiciones:
Elevada carga por rueda.
Ser isostático.
Neumáticos de gran anchura de huella.
Disponer de un sistema de tracción que permita un arranque y una parada suave y progresiva.
Instalación de inflado de ruedas centralizado.
Solapamiento de las ruedas delanteras y traseras, incluso en curvas.
Las características fundamentales de los compactadores de ruedas autopropulsados son las siguientes. Constan de dos ejes, con un total de 7, 9 e incluso 11 ruedas. La anchura de trabajo es de 2,00 m, con modelos que llegan a 2,50 m. El efecto de compactación varía al lastrarlos con agua o arena, y variando la presión de los neumáticos. Se pueden clasificar estos equipos en tres grupos, atendiendo a su carga total y por rueda:
Ligeros: hasta 15 toneladas de carga total y 2,5 toneladas por rueda.
Medios: hasta 25 y 4 toneladas respectivamente.
Pesados: hasta 45 y 6 respectivamente.
La presión de inflado varía entre 0,2 y 0,9 MPa, y puede regularse en marcha. Estas máquinas pueden trasladarse hasta a 30 km/h, aunque su velocidad de trabajo oscila entre 6 y 8 km/h.
Os he preparado un vídeo donde os explico esta máquina. Espero que os guste.
Os dejo varios vídeos explicativos de este compactador.
Los compactadores mixtos de neumáticos y de cilindro vibratorio («combination rollers«) se usan principalmente para compactar firmes asfálticos. No obstante, en obras de tierra, presentan la ventaja de combinar la acción profunda del cilindro vibratorio con el sellado superficial producido por el eje trasero, formado por 3 o 4 neumáticos. Ambas partes pueden estar articuladas o bien presentar un bastidor rígido. La tracción suele darse en ambos ejes.
La anchura de compactación suele ser de 1,70 m, aunque algunos modelos llegan a 2,30 m. El diámetro del rodillo varía entre 1,10 y 1,50 m, repartiéndose el peso en un 40% sobre el cilindro y en un 60% sobre las ruedas neumáticas. El peso oscila entre 7 y 16 t. La carga por rueda neumática suele ser de 2 a 3 t, lo que implica una carga lineal unitaria de 25 a 30 kp/cm.
Las frecuencias de trabajo oscilan entre 25 y 40 Hz con amplitudes nominales a elegir, normalmente, entre dos o tres valores inferiores a 1 mm. La velocidad llega a 15 km/h, aunque la de trabajo puede ser de 7 km/h.
Este tipo de compactador mixto puede resultar interesante en determinadas obras, pero hay que tener en cuenta que el rendimiento es menor que el de dos máquinas por separado.
En ocasiones (Figura 2), este compactador híbrido puede remolcarse. Son máquinas de mayor durabilidad, con un bastidor de alta resistencia capaz de lastrar hasta 14 t.
Figura 2. Compactador mixto remolcado. https://www.broons.com/product/combination-roller/
Os paso un vídeo de un compactador mixto de la empresa CASE.
Referencias:
ABECASIS, J. y ROCCI, S. (1987). Sistematización de los medios de compactación y su control. Vol. 19 Tecnología carreteras MOPU. Ed. Secretaría General Técnica MOPU. Madrid, diciembre.
ROJO, J. (1988): Teoría y práctica de la compactación. (I) Suelos. Ed. Dynapac. Impresión Sanmartín. Madrid.
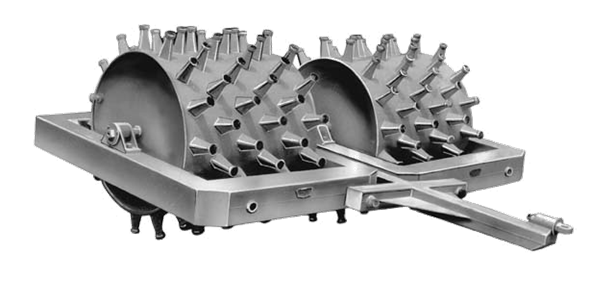
Están remolcados por un tractor y constan de un cilindro de 1,20 a 1,70 m de anchura y de 1,00 a 1,50 m de diámetro, al cual se le disponen 90 a 130 patas de 15 a 30 cm de longitud. Estos salientes están dispuestos al tresbolillo y pueden presentar formas truncadas, cilíndricas u otras. El grosor máximo de la tongada, ligado a la altura de la pata y al espesor de esta, no debe superar 30 cm. La presión que transmiten al terreno oscila entre 1,5 y 3,0 MPa.
Su uso actual es limitado. El peso de cada rodillo es de unas 5 t, y pueden remolcarse varios a la vez para mejorar el rendimiento de la compactación. La velocidad de trabajo oscila entre 3 y 10 km/h. Es una máquina muy robusta, y por consiguiente no necesita casi entretenimiento, pero requiere, para asegurar el rendimiento, una gran superficie de trabajo.
Figura 2. Rodillo remolcado pata de cabra. Imagen: V. Yepes (2020)
Os dejo un vídeo descriptivo de este compactador:
Referencias:
ABECASIS, J. y ROCCI, S. (1987). Sistematización de los medios de compactación y su control. Vol. 19 Tecnología carreteras MOPU. Ed. Secretaría General Técnica MOPU. Madrid, diciembre.
ROJO, J. (1988): Teoría y práctica de la compactación. (I) Suelos. Ed. Dynapac. Impresión Sanmartín. Madrid.
Compactador vibratorio tipo tándem Caterpillar CD54B de tambor dividido
Son máquinas más utilizadas en la compactación de firmes asfálticos que en obras de tierras. Constan de dos cilindros montados sobre un bastidor, articulado o rígido. En este caso todo el peso se suma al esfuerzo de compactación. Pueden ser vibrantes uno o los dos cilindros, y ser tractores uno o ambos.
Sus anchos de trabajo oscilan entre los 0,60 m y los 2,10 m. Los diámetros de los cilindros varían entre los 0,60 a los 1,30 m. Los pesos pueden ser de 2 t en los más ligeros, a las 10 t en los más pesados. Presentan valores de frecuencia de trabajo elevados, de 50 a 55 Hz y amplitudes nominales comprendidas entre 0,3 y 0,8 mm. Las velocidades de trabajo llegan a 10-13 km/h, aunque en tierra no se aconseja superar los 4 km/h.
Os paso algunos vídeos de este tipo de compactador.
YEPES, V. (2023). Maquinaria y procedimientos de construcción. Problemas resueltos. Colección Académica. Editorial Universitat Politècnica de València, 553 pp. Ref. 376. ISBN 978-84-1396-174-3
Son similares a los compactadores de rodillos lisos en sus características geométricas, de frecuencias, amplitudes y velocidades, pudiéndose en muchos modelos intercambiarse los equipos. Llevan de 130 a 165 patas por cilindro, adoptando la forma de tacos de 100 mm de altura, ocupando aproximadamente un tercio de la superficie del tambor. Son adecuados para suelos plásticos y granulares, recomendándose los modelos de 16-20 t, con tracción al tambor. Es conveniente que las patas penetren y no se apoye la parte lisa del tambor en la capa. Para ello los espesores de capa adecuados no deberían ser superiores a la altura de las patas.
Os dejo algún vídeo para que veáis cómo trabaja este compactador.
En un artículo anterior tuvimos ocasión de hablar en detalle de los aspectos básicos del control de calidad en la compactación de un suelo. Pero, ¿qué pasa si existe una desviación entre los resultados que esperábamos y los realmente obtenidos? Es un tema que suscita fuertes discusiones, sobre todo por su repercusión económica y funcional. Mi opinión es que hay que ser muy cauteloso con la aceptación de unidades de obra con mermas de calidad, pero a veces se admiten excepciones que deben estar documentadas y razonadas. Una posibilidad es imponer una penalización económica lo suficientemente fuerte como para desaconsejar al contratista que entre en esa zona cercana a la aceptación, pero ligeramente por debajo de las especificaciones.
A veces, el incumplimiento de las especificaciones que afecten a una parte determinada de la obra de terraplén puede dar lugar a penalizaciones en forma de deducción en la relación valorada, siempre que, a criterio del Director Facultativo, estos defectos no impliquen una pérdida significativa de la funcionalidad y seguridad de la obra o parte de la obra y no sea posible subsanarlos posteriormente. Esta posibilidad no debe implicar nunca una aceptación sin más de la merma de calidad, sino que solo es aplicable en casos excepcionales.
A modo de ejemplo, y sin que ello suponga que esta penalización sea la más adecuada para todos los casos, el artículo 32.31 del Pliego de Condiciones Técnicas Generales 1988, del Ayuntamiento de Madrid propone las siguientes fórmulas, que podrán ser modificadas o complementadas en el Pliego de Condiciones Técnicas Particulares:
P1 = 0,04 ·ΔC · P (por defecto de compactación)
P2 = 0,20 · N · P (por cambio de calidad en el material)
siendo:
P1 y P2 deducción unitaria por penalización €/m3
P precio unitario del terraplén €/m3
ΔC defecto en % del grado de compactación en relación con el especificado.
Figura 1. Compactador vibratorio de rodillo liso. https://construction.trimble.com
En la ejecución de los terraplenes son objeto de control los suelos utilizados, la extensión, la compactación y la geometría. La vigilancia de la compactación consistirá en la comprobación de que el producto final cumple las especificaciones. Ya vimos que no solo la densidad, sino otras condiciones como la deformación o el asiento máximo bajo carga pueden medir si se ha logrado o no dicho objetivo.
La medida del porcentaje de compactación, o lo que es lo mismo, de la densidad «in situ» del suelo, puede hacerse a través de la extracción de una muestra del terreno, o bien mediante el uso de aparatos nucleares, más rápidos y con menores errores debidos al operador.
Otros procedimientos suponen evaluar la deformabilidad del terreno, mediante el módulo de deformación o medidas de deflexiones del suelo al paso de cargas.
El control de calidad de esta unidad de obra puede realizarse mediante una comprobación del producto terminado, o bien por una verificación del proceso, teniendo ambos sistemas sus ventajas e inconvenientes.
Durante mucho tiempo, la filosofía subyacente en las relaciones cliente-proveedor se han basado en la desconfianza y las partes se consideraban adversarios. Resulta de interés lo que Juran y Gryna (1995) decían al respecto: “… algunos compradores veían a sus proveedores como criminales potenciales que podían tratar de que sus productos defectuosos pasaran la inspección al ser recibidos”.
En la actualidad, se va asumiendo la necesidad de que la relación entre compradores y proveedores -dirección técnica y contratista-, se base en el respeto mutuo y la cooperación, pues de esta forma se benefician las dos partes. El intercambio de información de todo tipo y la colaboración en la resolución de problemas son aspectos fundamentales en la consecución de componentes de calidad. En este sentido, el proveedor no solo suministra productos de calidad, sino que, además, facilita la información que evidencia que su Sistema de Calidad (por ejemplo, basado en ISO 9001) es eficiente. Con ello se garantiza y se asegura la calidad ganándose la confianza del comprador.
Control del producto terminado o de recepción
Es el clásico procedimiento contractual, en el cual sólo se comprueba la densidad final alcanzada en una serie de puntos. Se establecen lotes de control y el muestreo se hace de forma aleatoria. En este tipo de verificación, el constructor puede establecer el sistema de trabajo que considere adecuado, siempre que luego cumpla con las especificaciones.
El sistema está indicado cuando tanto los materiales como los métodos de compactación no son demasiado homogéneos. Ello suele coincidir con ritmos de obra de medios a bajos, permitiendo la realización de un número elevado de determinaciones de densidad.
Existen dos grandes grupos o tendencias en cuanto al control de calidad por “resultado” (remitimos a bibliografía específica la descripción de estos procedimientos de control de calidad):
1) Control por peso específico:
1.1.- Métodos directos:
1.1.1.- Clásicos: Arena, membrana, aceite, grandes catas, etc.
El PG3 resume en tres los ensayos de referencia, con las siguientes especificaciones:
Ensayo de compactación Proctor:
El Proyecto, o en su defecto el Director de las Obras, señalará, entre el Proctor normal (PN) o el Proctor modificado (PM), el ensayo a considerar como Proctor de referencia (PR). En caso de omisión se considerará como ensayo de referencia el PM.
En este sistema de control, se clasificarán los materiales a utilizar en grupos cuyas características sean similares. A estos efectos se consideran similares aquellos materiales en los que se cumpla, en un mínimo de 3 muestras ensayadas, lo siguiente:
Pertenencia al mismo tipo de clasificación definida por el PG3.
Rangos de variación de la densidad seca máxima en el PR no superiores al 3%.
Rangos de variación de la humedad óptima en el PR no superiores al 2%.
Dentro de cada grupo se establecerán los correspondientes valores medios de la densidad seca máxima y de la humedad óptima que servirán de referencia para efectuar el análisis de los resultados del control. Se determinará asimismo la zona de validez que se indica después.
El volumen de cada uno de esos grupos será mayor de 20.000 m3. En caso contrario se recurrirá a otro procedimiento de control.
En el caso de que los materiales procedentes de una misma zona de extracción no puedan agruparse de la forma anteriormente descrita ni sea posible separarlos para su aprovechamiento, no será aplicable el método de control de producto terminado mediante ensayos Proctor, debiéndose recurrir al empleo intensivo del ensayo de carga con placa según NLT 357, con alguno complementario como el de huella según NLT 256, o el método de control de procedimiento, según determine el Director de las Obras.
Ensayo de carga con placa:
Para determinar el módulo de deformación del relleno tipo terraplén se utilizará el ensayo de carga con placa. Las dimensiones de dicha placa serán tales que su diámetro o lado sea al menos 5 veces superior al tamaño máximo del material utilizado. En ningún caso la superficie de la placa será inferior a 700 cm2. El ensayo se realizará según la metodología NLT 357 aplicando la presión, por escalones, en dos ciclos consecutivos de carga.
En caso de necesidad, el Proyecto podrá fijar otras condiciones de ensayo que las de la norma indicada, en cuyo caso deberá establecer los valores correspondientes a exigir para el módulo de deformación del segundo ciclo de carga Ev2, y para la relación K entre módulos de segundo y primer ciclos de carga.
Ensayo de la huella
En el caso de realizar el ensayo de la huella se utilizará la norma NLT 256, en la que se indica el control de asientos, sobre 10 puntos separados 1 m, antes y después del paso del camión normalizado.
El ensayo de huella se efectuará correlacionado con el ensayo de placa de carga NLT 357 y por tanto los valores de huella admisibles serán aquellos que garanticen el resultado de la placa de carga. Los mismos serán establecidos por el Director de las Obras a propuesta del Contratista apoyada por los correspondientes ensayos de contraste.
En todo caso los valores de huella admisible no serán superiores a los siguientes:
En cimiento, núcleo y espaldones: 5 mm.
En coronación: 3 mm.
El artículo 330 del PG3 establece las siguientes definiciones relativas al plan de control de calidad:
Definición de lote:
Dentro del tajo a controlar se define como «lote», que se aceptará o rechazará en conjunto, al menor que resulte de aplicar a una sola tongada de terraplén los siguientes criterios:
Una longitud de carretera (una sola calzada en el caso de calzadas separadas) igual a 500 m.
En el caso de la coronación una superficie de 3.500 m2 y en el resto de las zonas, una superficie de 5.000 m2 si el terraplén es de menos de 5 m de altura y de 10.000 m2 en caso contrario. Descontando siempre en el conjunto de estas superficies unas franjas de 2 m de ancho en los bordes de la calzada y los rellenos localizados según lo definido en el artículo 332, «Rellenos localizados» del PG3.
La fracción construida diariamente.
La fracción construida con el mismo material, del mismo préstamo y con el mismo equipo y procedimiento de compactación.
Nunca se escogerá un lote compuesto de fracciones correspondientes a días ni tongadas distintas, siendo por tanto entero el número de lotes escogido por cada día y tongada.
Muestras y ensayos a realizar en cada lote:
Dentro de la zona definida por el lote se escogen las siguientes muestras independientes:
Muestra de superficie: Conjunto de 5 puntos, tomados en forma aleatoria de la superficie definida como lote. En cada uno de estos puntos se determinará su humedad y densidad.
Muestra de borde: En cada una de las bandas de borde se fijará un punto por cada 100 m o fracción. Estas muestras son independientes de las anteriores e independientes entre sí. En cada uno de estos puntos se determinará su humedad y densidad.
Determinación de deformaciones: En coronación se hará un ensayo de carga con placa según NLT 357 por cada uno de los lotes definidos con anterioridad. En el resto de las zonas el Director de las Obras podrá elegir entre hacer un ensayo de placa de carga por cada lote o bien hacer otro tipo de ensayo en cada lote, como puede ser el de huella, de forma que estando convenientemente correlacionadas se exijan unos valores que garanticen los resultados del ensayo de placa de carga, aspecto este que se comprobará, al menos, cada 5 lotes.
La determinación de deformaciones habrá de realizarse siempre sobre material en las condiciones de densidad y grado de saturación exigidas, aspecto que, en caso de duda, y en cualquier caso que el Director de las Obras así lo indique, habrá de comprobarse. Incluso se podrá obligar a eliminar la costra superior de material desecado antes de realizar el ensayo.
Para medir la densidad seca «in situ» podrán emplearse procedimientos de sustitución (método de la arena UNE 103503, método del densímetro, etc.), o preferentemente métodos de alto rendimiento como los métodos nucleares con isótopos radiactivos. En todo caso, antes de utilizar estos últimos, se calibrarán sus resultados con las determinaciones dadas por los procedimientos de sustitución. Esta calibración habrá de ser realizada para cada uno de los grupos de materiales definidos anteriormente y se comprobará al menos una vez por cada 10 lotes ensayados. De forma análoga se procederá con los ensayos de humedad, por secado según UNE 103300 y nucleares.
Para espesores de tongada superiores a 30 cm se garantizará que la densidad y humedad medidas se corresponden con las del fondo de la tongada.
Para la aceptación de la compactación de una muestra el valor medio de la densidad de la muestra habrá de cumplir las condiciones mínimas impuestas en el PG3. Además, al menos el 60 % de los puntos representativos de cada uno de los ensayos individuales en un diagrama humedad-densidad seca, han de encontrarse dentro de la zona de validez que a continuación se define, y el resto de los puntos no podrán tener una densidad inferior en más 30 kg/m3 a las admisibles según lo indicado en el PG3, en el Proyecto o por el Director de las Obras.
La zona de validez es la situada por encima de la curva Proctor de referencia, normal o modificado según el caso, y entre las líneas de isosaturación correspondientes a los límites impuestos al grado de saturación, en el Proyecto o en su defecto en el PG3.
Dichas líneas límite, salvo indicación en contra del Proyecto, serán aquellas que pasen por los puntos de la curva Proctor de referencia correspondientes a humedades de -2 % y +1 % de la óptima. En el caso de suelos expansivos o colapsables los puntos de la curva Proctor de referencia serán los correspondientes a humedades de -1 % y +3 % de la óptima de referencia.
Figura 2. Control de compactación. http://www.geoconstruye.com
La humedad de las capas compactadas no será causa de rechazo, salvo cuando, por causa justificada, se utilicen suelos con características expansivas. En este caso, si no está previsto en el pliego de prescripciones técnicas, estos suelos deberán ser objeto de un estudio cuidadoso en laboratorio en el que se determinarán los valores de humedad y densidad a obtener en obra y los márgenes de tolerancia.”
Vemos que se trata de controles muestrales, de los que se pretenden inferir las características de la totalidad de la superficie ensayada. La inferencia estadística pretende obtener información de las muestras para conocer los parámetros poblacionales, cuantificando el riesgo de error en términos de probabilidad.
El lote es el conjunto del que se toma la muestra y sobre el que hay que tomar la decisión de aceptar o rechazar. Cada lote deberá haberse producido bajo condiciones homogéneas y durante un período de tiempo determinado.
Llegados a este punto es necesario hacer la siguiente consideración, basada en los fundamentos estadísticos de los planes de muestreo: no es justo realizar tamaños de muestra proporcionales a los tamaños del lote, ya que se varían las probabilidades de aceptar el lote, y ello puede ser utilizado injustamente en beneficio propio por la parte que toma la decisión. De esta forma, si quien decide el tamaño del lote es el contratista, tenderá a lotes de pequeño tamaño -y por tanto reducidos tamaños de muestra-, pues así, la casi totalidad de los lotes serán aceptados incluso -injustamente- los de baja calidad. Si, por el contrario, quien decide el tamaño es la administración, tenderá a pedir lotes de gran tamaño pues, así, se aceptarán solamente los muy buenos aunque también lotes de buena calidad serán -injustamente- rechazados. Por tanto, no es lo mismo determinar lotes de 1.000 m2 y una muestra de una unidad, que lotes de 5.000 m2 y muestras de 5 unidades, o lotes de 10.000 m2 y muestras de 10 unidades.
La muestra aleatoria simple es aquella que se toma de tal forma que todos los conjuntos de n determinaciones del lote tienen la misma probabilidad de constituir la muestra o, lo que es equivalente, que todas las determinaciones que se puedan tomar del lote tienen la misma probabilidad de formar parte de la muestra. Se deben evitar ir a los sitios “peores”, o a los que el operador que realiza los ensayos le parecen “representativos”.
Conviene tener en cuenta que un punto de porcentaje no es una cosa nimia, puesto que un material completamente suelto tiene ya una densidad del orden del 85% de la de referencia.
Los pesos específicos “in situ” y las diferencias entre humedades “in situ” y la óptima siguen una distribución normal. Para situaciones generales es corriente un coeficiente de variación inferior al 3% respecto al peso unitario e inferior al 1,5% respecto a la diferencia entre la población de humedades y la óptima. Es interesante el concepto de “homogeneidad” aplicado por la norma Suiza (SNV 640585a) en cuanto al peso específico aparente húmedo que establece un coeficiente de variación máximo del 5% para dicha variable.
Control del proceso
Con objeto de limitar el número de ensayos, que puede ser prohibitivo en algunos casos, se trata de aumentar el nivel de fiabilidad del producto introduciendo especificaciones en la forma de ejecutar la unidad de obra. Así, según el tipo de suelo, se pueden fijar unas máquinas a utilizar, unos espesores máximos de capa y delimitar el número mínimo de pasadas necesarias. Otro método sería establecer todos estos parámetros en función de los resultados obtenidos para un material en un tramo de prueba.
Su uso está indicado para fuertes ritmos de producción con materiales y sistemas de ejecución homogéneos. La rapidez de ejecución impide la realización de ensayos de producto terminado en número suficiente, y a veces hay que tomar decisiones con rapidez y agilidad, sin merma en la calidad.
El control del “proceso” requiere un conocimiento previo del comportamiento de cada material, un control exhaustivo de la capacidad de trabajo de las máquinas y un método de trabajo estrictamente controlado.
Este tipo de control, combinado con el de producto final, presenta ventajas evidentes, pero supone cierto «compromiso» por parte de la Administración contratante en el proceso de ejecución, que a veces es difícil de establecer de forma contractual. A estas dificultades administrativas se sumarían los problemas técnicos debido al clima, lo que entorpece la elaboración de procedimientos específicos de control que sean homogéneos. No obstante, es un tipo de control que se lleva a cabo en distintos países, destacando el modelo francés. A pesar de sus ventajas, este procedimiento apenas se emplea en nuestro país.
La prevención conlleva el reconocimiento de que la calidad debe generarse durante el proceso y no ser inspeccionada cuando el producto está acabado. Es mejor adelantarse a los acontecimientos en vez de reaccionar constantemente cuando los fallos se producen. Incluso desde el punto de vista de la eficiencia económica, es más barato dedicar parte de los recursos a la prevención que asumir sin más los costes de la no calidad.
Los nucleodensímetros como aparatos de medida
El empleo de ensayos tradicionales como el método de la arena han sido desplazados por el empleo de nucleodensímetros ya que éstos permiten la obtención de la densidad y la humedad de un forma casi instantánea. Son equipos que poseen una fuente radiactiva en el extremo de la sonda que se introduce en el terreno y dos detectores de radiación. La fuente se compone de Cesio 137, el cual emite fotones gamma. Estos fotones, antes de llegar a los detectores, chocan con los electrones de los átomos del suelo. Una alta densidad implica un alto número de choques, siendo menor el número de fotones que llegan a los detectores. La fuente radiactiva también posee Americio-241: Berilio, que emite neutrones. El detector de neutrones localiza la cantidad de los mismos que, debido a la presencia de átomos de hidrógeno del agua del suelo, son termalizados. Este mecanismo permite la obtención de la humedad.
Los nucleodensímetros tienen dos modos de obtener las densidades: transmisión directa (la sonda penetra en el material) y retrodispersión (en caso contrario). El modo de transmisión directa se debe emplear siempre que sea posible introducir la sonda en el material que se desea ensayar. El operador realiza un orificio en el suelo ayudándose de una pica y un mazo. La profundidad a la que debe introducirse la sonda deber ser igual o ligeramente inferior al espesor de la capa que se ensaya, para obtener una medición representativa de toda la capa.
El modo retrodispersión sólo debe utilizarse cuando la dureza de la capa impide la penetración de la sonda, como sucede en el hormigón en las mezclas bituminosas. En este caso sólo se mide la densidad de material situado hasta unos 8 cm por debajo de la superficie, perdiéndose la representatividad.
La prevención conlleva el reconocimiento de que la calidad debe generarse durante el proceso y no ser inspeccionada cuando el producto está acabado. Es mejor adelantarse a los acontecimientos en vez de reaccionar constantemente cuando los fallos se producen. Incluso desde el punto de vista de la eficiencia económica, es más barato dedicar parte de los recursos a la prevención que asumir sin más los costes de la no calidad.
A continuación dejo un vídeo sobre lo que es el densímetro nuclear.
Os dejo a continuación un vídeo sobre seguridad nuclear en el uso de medidores industriales nucleares, nucleodensímetros.
Referencias:
ABECASIS, J.; ROCCI, S. (1987). Sistematización de los medios de compactación y su control. Vol. 19 Tecnología carreteras MOPU. Ed. Secretaría General Técnica MOPU. Madrid, diciembre.
JURAN, J.M.; GRYNA, F.M. (1995). Análisis y planeación de la calidad: del desarrollo del producto al uso. McGraw Hill, 633 pp.
Figura 1. Apisonadora estática de rodillo liso tipo triciclo. Imagen: V. Yepes
Las apisonadoras estáticas son los compactadores más antiguos, constituidas por rodillos metálicos lisos revestidos mediante una gruesa chapa de acero. Se caracterizan por la presión estática que ejercen sobre el terreno, considerándose un área de contacto que depende del diámetro de los cilindros, del peso de la máquina y del tipo de suelo. Sin embargo, el efecto de la compactación estática alcanza muy poca profundidad, por lo que no son eficientes. Es por ello que hoy en día no se fabrican compactadores estáticos de rodillos, sino que son los vibratorios los que, en ausencia de vibración, se usan de forma estática para determinadas aplicaciones, como puede ser el planchado o sellado de la última capa compactada de suelo en una jornada o en las primeras pasadas de compactación de aglomerados asfálticos.
La densificación del suelo que provocan los rodillos lisos se reduce considerablemente a medida que éste profundiza en la tongada que se compacta y dicho efecto de compactación se produce de arriba hacia abajo.
En la compactación de suelos, estas máquinas serían adecuadas para arenas y gravas bien graduadas, limos y arcillas de baja plasticidad, en tongadas de 10-20 cm y 4-8 pasadas, pero no lo son en arenas uniformes, arenas limosas y arcillas blandas. Cuando se utiliza en arcillas y limos plásticos, es común que al cabo de cierto número de pasadas lleguen a presentarse fracturas o grietas en la parte superior de la tongada, debido a la rigidez que esta zona adquiere por excesiva compactación en comparación con la zona inferior de la misma capa. En este caso, queda la capa inferior con una rigidez y una compacidad más baja.
Existen dos tipos básicos: triciclo y tándem, pues no es habitual el uso del rodillo liso remolcado. Sus velocidades varían hasta 10-12 km/h.
Tipo triciclo
Figura 2. Apisonadora estática tipo triciclo
Consta de un cilindro delantero dividido normalmente en dos mitades con giro independiente para facilitar los cambios de dirección, y dos cilindros traseros en el eje motor de gran diámetro. Los rodillos delantero y traseros se encuentran solapados, con una anchura de compactación de unos 2 m. La distribución por eje del peso, es generalmente del 70% hacia el eje motriz (trasero) y el 30% hacia el eje direccional (delantero). La energía de trabajo se puede variar lastrándolo con agua. Sus pesos oscilan entre 7 y 20 t. Los motores diésel que los propulsan tienen una potencia media de 40 kW. La velocidad máxima de estas apisonadoras está entre 8 y 10 km/h.
El rodillo triciclo se utiliza en compactación de caminos de macadán, bacheos e incrustación de gravilla en tratamientos superficiales, no utilizándose ya en compactación de aglomerados y, menos aún, de terraplenes.
Tipo tándem
Figura 3. Apisonadora estática de rodillo liso tipo tándem. Imagen: V. Yepes
Lo componen dos cilindros, el delantero de dirección, y el trasero tractor, aunque a veces ambos son tractores. El movimiento direccional se obtiene con un ángulo entre los ejes de los dos rodillos. El ancho de compactación suele ser inferior a los 1,60 m. El peso normal oscila entre 5 y 15 t. La potencia de su motor diésel varía entre 25 y 125 kW. La velocidad máxima de estas apisonadoras está entre 8 y 15 km/h.
Las apisonadoras estáticas de rodillo liso son secundarias en las obras de tierra, ya que la presión transmitida al terreno es muy superficial debido a la reducida área de contacto -generatriz del cilindro. Se crea una costra rígida en superficie, por lo que muchas veces sirve la máquina para el sellado y cierre de una tongada. Otra de sus limitaciones, es que la carga transmitida siempre es constante, no adaptándose a la capacidad resistente que va adquiriendo el suelo con cada una de las pasadas.
El rodillo tándem ha quedado casi exclusivamente relegado al aglomerado, empleándose en algunos casos como compactador y en otros, simplemente como alisador, ya que con frecuencia la fase principal de compactación del aglomerado la realiza el compactador de neumáticos.









 Son similares a los compactadores de rodillos lisos en sus características geométricas, de frecuencias, amplitudes y velocidades, pudiéndose en muchos modelos intercambiarse los equipos. Llevan de 130 a 165 patas por cilindro, adoptando la forma de tacos de 100 mm de altura, ocupando aproximadamente un tercio de la superficie del tambor. Son adecuados para suelos plásticos y granulares, recomendándose los modelos de 16-20 t, con tracción al tambor. Es conveniente que las patas penetren y no se apoye la parte lisa del tambor en la capa. Para ello los espesores de capa adecuados no deberían ser superiores a la altura de las patas.
Son similares a los compactadores de rodillos lisos en sus características geométricas, de frecuencias, amplitudes y velocidades, pudiéndose en muchos modelos intercambiarse los equipos. Llevan de 130 a 165 patas por cilindro, adoptando la forma de tacos de 100 mm de altura, ocupando aproximadamente un tercio de la superficie del tambor. Son adecuados para suelos plásticos y granulares, recomendándose los modelos de 16-20 t, con tracción al tambor. Es conveniente que las patas penetren y no se apoye la parte lisa del tambor en la capa. Para ello los espesores de capa adecuados no deberían ser superiores a la altura de las patas.




