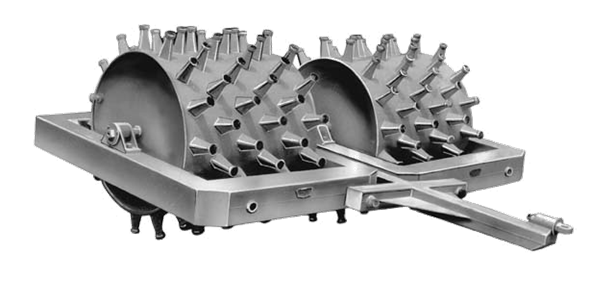
Se trata de un compactador estático de rodillo con patas apisonadoras. El nombre de «pata de cabra» se debe a la similitud con la acción de pasar un rebaño, en la que las patas penetran en el suelo y lo compactan.
Están remolcados por un tractor y constan de un cilindro de 1,20 a 1,70 m de anchura y de 1,00 a 1,50 m de diámetro, al cual se le disponen 90 a 130 patas de 15 a 30 cm de longitud. Estos salientes están dispuestos al tresbolillo y pueden presentar formas truncadas, cilíndricas u otras. El grosor máximo de la tongada, ligado a la altura de la pata y al espesor de esta, no debe superar 30 cm. La presión que transmiten al terreno oscila entre 1,5 y 3,0 MPa.
Su uso actual es limitado. El peso de cada rodillo es de unas 5 t, y pueden remolcarse varios a la vez para mejorar el rendimiento de la compactación. La velocidad de trabajo oscila entre 3 y 10 km/h. Es una máquina muy robusta, y por consiguiente no necesita casi entretenimiento, pero requiere, para asegurar el rendimiento, una gran superficie de trabajo.

Os dejo un vídeo descriptivo de este compactador:
Referencias:
ROJO, J. (1988): Teoría y práctica de la compactación. (I) Suelos. Ed. Dynapac. Impresión Sanmartín. Madrid.
YEPES, V. (1997). Equipos de movimiento de tierras y compactación. Problemas resueltos. Colección Libro Docente n.º 97.439. Ed. Universitat Politècnica de València. 253 pág. Depósito Legal: V-4598-1997. ISBN: 84-7721-551-0.
YEPES, V. (2021). Procedimientos de construcción para la compactación y mejora del terreno. Colección Manual de Referencia, 1ª edición. Editorial Universitat Politècnica de València, 426 pp. Ref. 428. ISBN: 978-84-9048-603-0.
YEPES, V. (2022). Gestión de costes y producción de maquinaria de construcción. Colección Manual de Referencia, serie Ingeniería Civil. Editorial Universitat Politècnica de València, 243 pp. Ref. 442. ISBN: 978-84-1396-046-3
YEPES, V. (2023). Maquinaria y procedimientos de construcción. Problemas resueltos. Colección Académica. Editorial Universitat Politècnica de València, 562 pp. Ref. 376. ISBN 978-84-1396-174-3
Cursos:
Curso de compactación superficial y profunda de suelos en obras de ingeniería civil y edificación.
Curso de gestión de costes y producción de la maquinaria empleada en la construcción.

Esta obra está bajo una licencia de Creative Commons Reconocimiento-NoComercial-SinObraDerivada 4.0 Internacional.