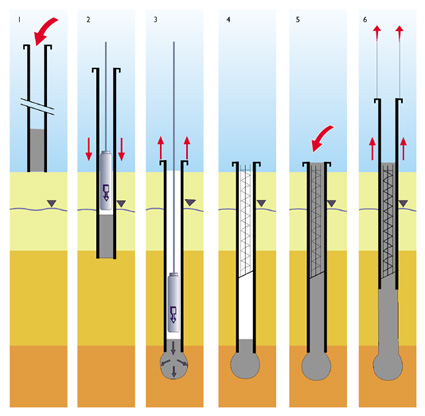
El sistema Omega de ejecución de pilotes permite, mediante la aplicación de rotación y empuje a la cabeza en la fase de perforación y de rotación y tiro en la fase de extracción, la instalación de pilotes con total ausencia de vibraciones, y produce un desplazamiento lateral del terreno que lo compacta y evita la extracción de detritus.
Por encima del diámetro máximo de la cabeza, unas hélices horizontales y la inclinación adecuada del ángulo superior producen un segundo desplazamiento del terreno durante la secuencia de extracción y la fase de hormigonado. En esta fase, la presión controlada de inyección de hormigón a través de la varilla del tubo central induce un tercer estado de desplazamiento, asegurando una perfecta adherencia del pilote al terreno.
Se utiliza una perforadora de vuelo parcial con una sección de desplazamiento que comprime y mejora la densidad de los flancos del agujero. Esto mejora la fricción perimetral y la capacidad de carga del pilote vaciado en el molde.
Un documento explicativo lo podéis encontrar aquí: http://www.ifc-es.com/docs/doc478f25b17f2af6.04560118.pdf de la empresa IFC Cimentaciones Especiales S.A. Otro muy interesante, de Juan José Rosas: http://www.consultorsestructures.org/images/stories/quaderns/quaderns15.pdf?phpMyAdmin=1f73cb5e5b5871b17a5dd37e0ee619a6
Os dejo un vídeo en el que podéis ver cómo se realiza este tipo de piloteaje. Espero que os guste.
Referencia:
YEPES, V. (2020). Procedimientos de construcción de cimentaciones y estructuras de contención. Colección Manual de Referencia, 2ª edición. Editorial Universitat Politècnica de València, 480 pp. Ref. 328. ISBN: 978-84-9048-903-1.
Cursos:

Esta obra está bajo una licencia de Creative Commons Reconocimiento-NoComercial-SinObraDerivada 4.0 Internacional.