Las columnas de módulo controlado, también llamadas columnas de mortero de desplazamiento, mejoran del terreno mediante una red de inclusiones verticales semi-rígidas. A diferencia de los pilotes, solo pretenden reducir el asiento total y diferencial del terreno, liberando una parte de las cargas transmitidas. Es una técnica desarrollada por Menard en 1994, y está bajo patente. Se trata, en definitiva, de reforzar el suelo con inclusiones de mortero u hormigón bombeable, que se comporta como un material compuesto poco compresible. Ello permite el uso de cimentación superficial en zonas donde usualmente se utilizan cimentaciones profundas. Se pueden instalar en terrenos tanto granulares como cohesivos, incluso en suelos con algo contenido orgánico o turba. Es idóneo para cargas fuertes y limitaciones estrictas de asientos.
Figura 1. Cabeza de barrena de desplazamiento para la ejecución de una columna de módulo controlado. http://www.pilotesyobras.com/tratamientos-suelos-columnas-mortero-desplazamiento.asp
La técnica se ejecuta en diámetros entre 250 y 500 mm y profundidades de unos 25 a 30 m, con producciones diarias superiores a los 250 metros lineales, pudiendo alcanzar valores de 400 a 500 m de columna por jornada de trabajo. Su coste es relativamente bajo al realizarse en diámetros pequeños frente a otras técnicas que consumen cantidades elevadas de grava. Presenta un rendimiento alto, reduce las cuantías de hormigón y acero de la cimentación, reparte bien las cargas y limita los asientos, además, es una técnica respetuosa con el medio ambiente, pues no hay extracción de material y tampoco vibraciones.
La perforación se realiza con una barrena hueca que desplaza el terreno horizontalmente, sin vibraciones ni producción de desechos. La inyección del mortero u hormigón se realiza por el interior de la barrena, de abajo a arriba, con presiones moderadas (normalmente inferior a 0,5 MPa) y garantizando la continuidad del hormigonado. La resistencia del hormigón o del mortero es de al menos 15 MPa. El módulo de deformación del mortero es de 5 a 30 veces menor que el del hormigón.
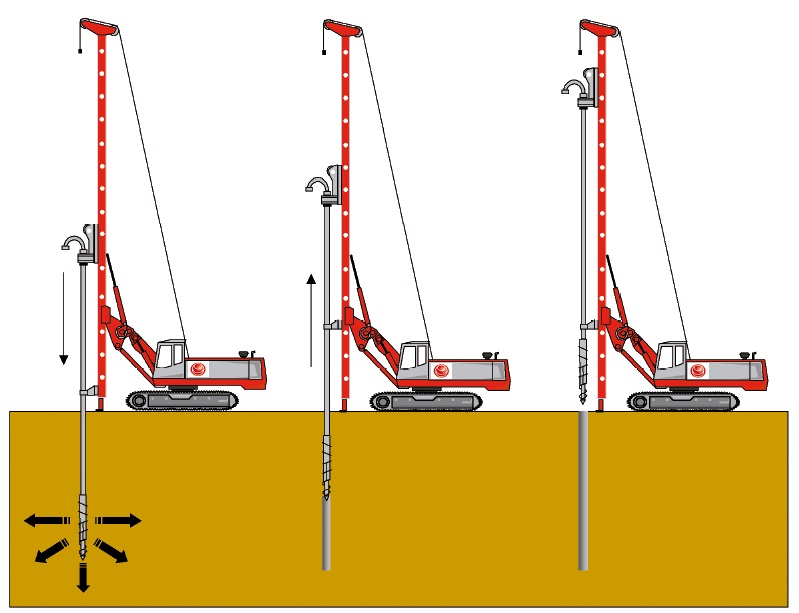
En la Figura 2 se observan las fases del procedimiento constructivo. La barrena se atornilla en el suelo hasta la profundidad especificada y luego se sube sin extraer el material. A continuación, se incorpora la lechada o mortero a través del taladro hueco. Cuando estas columnas soportan estructuras flexibles, como por ejemplo una solera, se termina con una capa granular de un espesor entre 40 y 80 cm. La capa de reparto también se puede estabilizar con cemento y, en el caso de cargas elevadas, pueden ser necesarios espesores de hasta 3,00 m combinados con geomallas de refuerzo.
Figura 2. Fases del procedimiento constructivo de las columnas de módulo controlado (cortesía de Menard)
Os dejo varios vídeos de la técnica de columnas de módulo controlado de la empresa Menard.
A continuación os dejo un folleto explicativo de Menard sobre este sistema de mejora de terrenos.
MARTÍ, J.V.; GONZÁLEZ, F.; YEPES, V. (2004). Temas de procedimientos de construcción. Mejora de terrenos.Editorial de la Universidad Politécnica de Valencia. Ref. 2004.844.
Figura 1. Compactación dinámica. https://civildigital.com/ground-improvement-techniques-complete-list-of-methods-classifications/
La compactación dinámica (“dynamic compaction”, DC) es una técnica que mejora la capacidad portante de los suelos mediante al dejar caer una masa desde cierta altura. El nombre de compactación dinámica no refleja con exactitud los procesos reales de carga y transmisión de energía, por lo que también suele llamarse compactación dinámica profunda (“deep dynamic compaction”). Uno de los mitos de la compactación dinámica es que se trata de un tratamiento superficial del suelo, ya que las cargas se aplican en la superficie. Sin embargo, a diferencia de la compactación superficial, es un proceso de densificación que llega a profundidades de entre 3 y 4 metros. Tras el impacto, se crean cráteres de hasta dos metros de profundidad, que deben rellenarse y compactarse. La densificación en profundidad se produce como resultado de la energía de las ondas dinámicas que se transmite a través del suelo. Este tratamiento se aplica en edificios industriales, plataformas portuarias y aeroportuarias, terraplenes viarios y ferroviarios, etc. Además, es idóneo para obras extensas, con rendimientos de más de 10000 m2 por mes.
La técnica de dejar caer grandes masas sobre la superficie del suelo para mejorarla en profundidad se viene empleando desde hace tiempo. Menard y Broise (1976) hacen referencia a dibujos muy antiguos que sugieren que esta técnica se utilizaba en China desde hacía siglos. Los romanos también la utilizaron en sus construcciones antes del año 100 a. C. En Estados Unidos se empleó un antiguo cañón para compactar ya en 1871 (Lundwall, 1968). En la antigua Unión Soviética también se compactaron loess con buenos resultados, si bien con pesos y alturas de caída mucho menores que en la actualidad (Faraco, 1980). En los años cuarenta, este procedimiento constructivo se empleó en la construcción de un aeropuerto en China y un área portuaria en Dublín. Sin embargo, la técnica actual se puede fechar en 1970, cuando Louis Menard patentó este método en Francia, favorecido sin duda por la aparición de las gigantescas grúas montadas sobre orugas. En Gran Bretaña y en Estados Unidos se empezó a utilizar en los años 1973 y 1975, respectivamente.
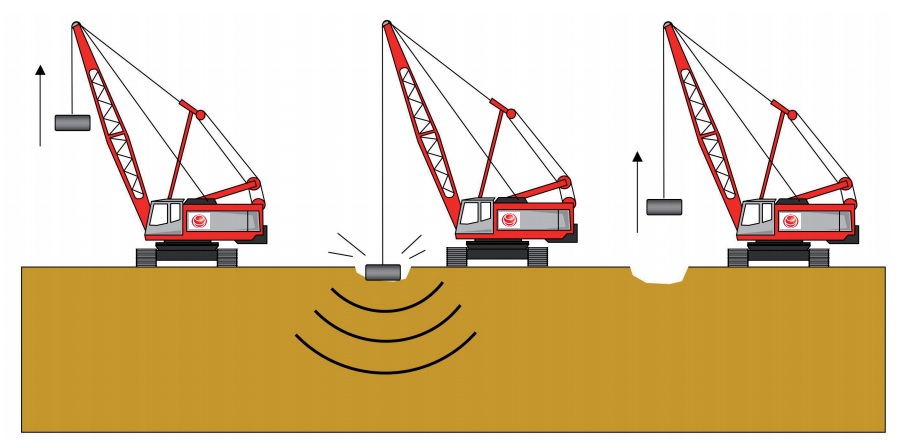
Hoy en día, es habitual el uso de pesos que oscilan entre 1 y 30 t, con alturas de caída de entre 10 y 30 m, a veces más. Los pesos son de acero para soportar las fuerzas dinámicas repetitivas. Normalmente, se utiliza una grúa para dejar caer el peso, aunque también existen equipos especiales. Las grúas deben permanecer en buenas condiciones, ya que no están diseñadas para cargas dinámicas repetitivas.
Figura 2. Esquema de la ejecución de la compactación dinámica. Cortesía de Menard
Este tipo de tratamiento depende de las características del suelo y de la energía utilizada. En principio, se puede utilizar en suelos granulares, tanto saturados como no saturados. También ofrece buenos resultados en rellenos artificiales heterogéneos, que difícilmente se mejorarían con otros procedimientos. La mejora se traduce en un aumento de la capacidad portante y una reducción de los asientos, incluidos los diferenciales. Es un método muy adaptado y empleado para prevenir la licuefacción de suelos. La compactación dinámica permite incluso cimentar con zapatas convencionales, ya que proporciona una capacidad portante al suelo de entre 100 y 150 kPa. Además, es una solución económica en comparación con la excavación y sustitución del suelo, la precarga o las inyecciones. Los costes son aproximadamente de 2/3 respecto a las columnas de grava, con un ahorro de hasta el 50 % en comparación con la compactación profunda. Se pueden conseguir rendimientos de 300 a 600 m2/día (García Valcarce et al., 2003).
La compactación dinámica se utiliza para densificar suelos flojos, saturados y sin cohesión, y así se reduce el riesgo de licuefacción del terreno. En este sentido, el proceso de densificación es similar al de la vibrocompactación. Es una de las mejores alternativas para densificar rellenos heterogéneos y escombros, que podrían causar problemas a otras técnicas como las columnas de grava o las inclusiones rígidas. También se podría emplear en suelos finos cohesivos, pero el éxito en este caso es más dudoso y es necesario prestar atención a la generación y disipación de las presiones intersticiales. En ocasiones, esta técnica se emplea conjuntamente con las columnas de grava para facilitar la disipación de las presiones intersticiales (Bayuk y Walker, 1994).
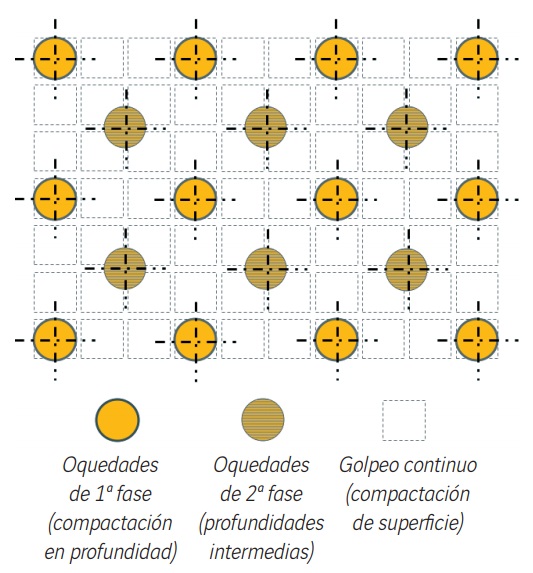
Los patrones de caída suelen consistir en cuadrículas primarias y secundarias (y ocasionalmente terciarias), como las que se muestran en la Figura 3. El espaciamiento entre puntos de impacto oscila entre 2 y 3 m en el caso de las mazas pequeñas y supera los 10 m en el de las mazas pesadas. Una vez que la profundidad del cráter alcanza aproximadamente 1 m, se rellena con material granular antes de proceder a nuevas caídas en ese lugar.
Figura 3. Fases en la compactación dinámica. Cortesía de Menard
El tratamiento se da en varias pasadas y la profundidad alcanzada por la densificación se puede relacionar con la energía del golpe mediante la siguiente fórmula empírica (Mayne et al., 1984):
donde:
M = masa de la maza (toneladas)
H = altura de caída (metros)
D = profundidad efectiva de la compactación (metros)
k = factor empírico que depende del tipo de suelo y de las características del tratamiento, que varía entre 0,35 (arenas limosas y limos con IP=10%) y 0,6 (gravas y arenas limpias), aunque un valor usual puede ser 0,5.
Teniendo en cuenta lo anterior, y conociendo las capacidades máximas de las grúas normalmente disponibles (H=30 m, M=20 t), la profundidad efectiva máxima varía entre 7 y 12 m, aproximadamente (Armijo y Blanco, 2017). No obstante, se pueden alcanzar profundidades de tratamiento de hasta 30 m (García Valcarce et al., 2003).
Durante la compactación existe un efecto instantáneo al reducirse el índice de huecos tras el impacto, y un efecto diferido en el caso de suelos saturados al disiparse la sobrepresión intersticial y reestructurarse el material a un estado más denso.
Con todo, la compactación dinámica presenta algunos inconvenientes. En efecto, se necesita una superficie mínima de 15000 m2 para garantizar cierta rentabilidad económica y, además, se debe dejar una distancia mínima de 20 a 30 m a las estructuras próximas para evitar daños (García Valcarce et al., 2003).
El procedimiento de cómo se realiza la compactación dinámica está ampliamente descrito en el trabajo de Liausu (1984).
He grabado un pequeño vídeo explicativo de esta técnica de mejora de terrenos.
A continuación tenéis un folleto explicativo de Menard.
Bayuk, A.A.; Walker, A.D. (1994). «Dynamic Compaction. Two Case Histories Utilizing Innovative Techniques.» In-Situ Deep Soil Improvement, ASCE, Geotechnical Special Publication No.45.
Faraco, C. (1980). “Mejora del terreno de cimentación”, en Jiménez Salas (coord.) Geotecnia y Cimientos III, primera parte, pp. 489-531.
Findlay, J.D.; Sherwood, D.E. (1986).”Improvement of a hydraulic fill site in Bahrain using modified heavy tamping methods” Building on Marginal & Derelict Land., May 7-9.
García Valcarce, A. (dir.) (2003). Manual de edificación: mecánica de los terrenos y cimientos. CIE Inversiones Editoriales Dossat-2000 S.L. Madrid, 716 pp.
Liausu, P. (1984) Renforcement de Couches de Sol Compressibles par Substitution Dynamique, In-Situ Soil and Rock Reinforcement Conference, Paris.
Lundwall, N.B. (1968). The Saint George Temple, in “Temples of the Most High, Bookcraft, Salt Lake City, Chapter 3, p. 78.
Mayne, P.W.; Jones, J.S.; Dumas, J.C. (1984). Ground response to dynamic compaction. Journal of Geotechnical Engineering, ASCE, Vol. 110(6), pp. 757-774.
Ministerio de Fomento (2002). Guía de Cimentaciones. Dirección General de Carreteras.
Menard, L.; Broise Y. (1976). “Theoretical and practical aspects of dynamic consolidation”, Ground Treatment by deep compaction, Institution of Civil Engineers, LONDON, pp. 3-18.
Skempton, A.W. (1986). Standard Penetration Test Procedures and the Effects in Sand of Overburden Pressure, Relative Density, Particle Size, Ageing and Overconsolidation. Geotechnique, 36, pp. 425-437.
Uto, K.; Fuyuki, M. (1981). “Present and Future Trend on Penetration Testing in Japan”, Japanese Soc. SMFE.
Varaksin, S. (1981). “Recent development in soil improvement techniques and their practical applications”. Sol. Soils, N.º 38/39.