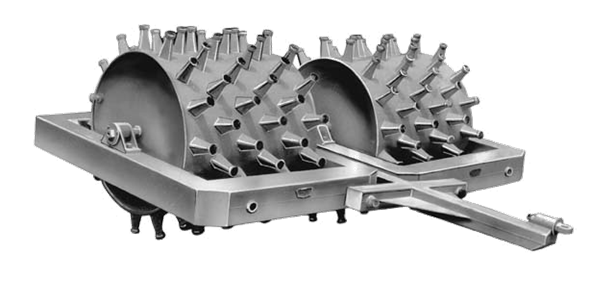
Consisten en un bastidor en forma de marco sobre el que se apoya el cilindro mediante amortiguadores, y en el que también se sitúa el motor que genera las vibraciones. Ahora bien, algunos modelos aprovechan la energía vibrante del tractor remolcador para evitar que la vibración perjudique al motor situado sobre el rodillo. Son máquinas aún utilizadas que precisan de un tractor, son difíciles de maniobrar, tienen grandes radios de giro y solo permiten el trabajo en un solo sentido.

Se puede estimar el esfuerzo necesario en el gancho del tractor T como:
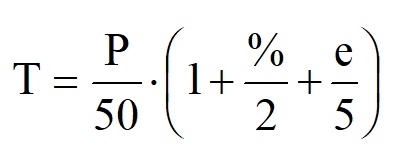
donde:
P = Peso del rodillo remolcado en kg.
% = Pendiente a superar por el rodillo.
e = Espesor de la tongada a compactar en cm.
Sus pesos oscilan entre 3 y 15 t, con una anchura de compactación de unos 2,00 m y un diámetro de cilindro de hasta 1,80 m. Son normales frecuencias entre 25 y 30 Hz y amplitudes nominales del orden de los 2 mm. Su velocidad de trabajo se sitúa entre 2,0 y 5,0 km/h.
Este tipo de rodillo se utiliza cada vez menos, salvo en los pedraplenes más pesados. Tratándose de suelos, las tongadas óptimas para un rodillo de 3-4 t son de 20 a 30 cm. Los rodillos de 10-12 t pueden compactar tongadas de 50-60 cm. En el caso de pedraplenes, se llega a utilizar los de mayor tonelaje sobre tongadas de 60-80 cm, que en ocasiones pueden alcanzar 100-150 cm, aunque en este caso la efectividad es más bien escasa.
A continuación, os dejo algunos vídeos del funcionamiento de este compactador.
Referencias:
YEPES, V. (1997). Equipos de movimiento de tierras y compactación. Problemas resueltos. Colección Libro Docente nº 97.439. Ed. Universitat Politècnica de València. 253 pág. Depósito Legal: V-4598-1997. ISBN: 84-7721-551-0.
YEPES, V. (2021). Procedimientos de construcción para la compactación y mejora del terreno. Colección Manual de Referencia, 1ª edición. Editorial Universitat Politècnica de València, 426 pp. Ref. 428. ISBN: 978-84-9048-603-0.
YEPES, V. (2022). Gestión de costes y producción de maquinaria de construcción. Colección Manual de Referencia, serie Ingeniería Civil. Editorial Universitat Politècnica de València, 243 pp. Ref. 442. ISBN: 978-84-1396-046-3
YEPES, V. (2023). Maquinaria y procedimientos de construcción. Problemas resueltos. Colección Académica. Editorial Universitat Politècnica de València, 562 pp. Ref. 376. ISBN 978-84-1396-174-3
Cursos:
Curso de compactación superficial y profunda de suelos en obras de ingeniería civil y edificación.
Curso de gestión de costes y producción de la maquinaria empleada en la construcción.

Esta obra está bajo una licencia de Creative Commons Reconocimiento-NoComercial-SinObraDerivada 4.0 Internacional.