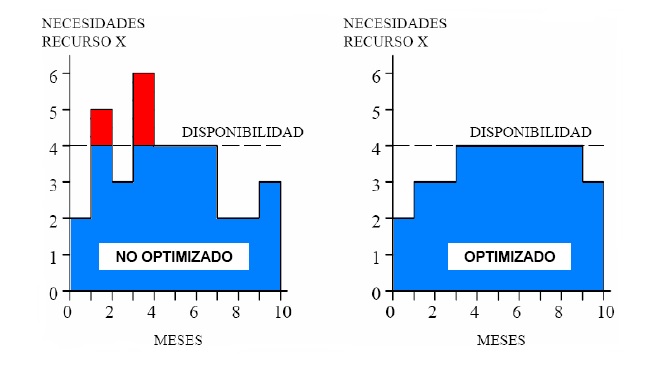
Toda actividad necesita recursos para ejecutarse. La programación de los recursos disponibles constituye un tema crucial para lograr que la obra esté finalizada en los plazos y costes establecidos. Consiste en asociar los recursos a sus tareas respectivas y ver cómo se ensamblan en el conjunto de la obra. Se emplea para ello una representación gráfica de los recursos necesarios a lo largo del tiempo; recibe el nombre de diagrama de carga. Estos histogramas proporcionan un medio gráfico eficaz para observar su evolución temporal y para analizar los períodos de carencia previsibles por superposición con los diagramas de recursos disponibles (véase la figura).
La limitación de recursos en la realización de una obra provoca conflictos que pueden resolverse mediante métodos de nivelación y de asignación. Los primeros laminan el diagrama de cargas sin producir retrasos en el plazo programado. Los métodos de asignación, por otra parte, pretenden que los recursos necesarios no superen los disponibles, pero con la condición de que el retraso provocado sea el mínimo posible. Con ayuda de las diversas técnicas de redes, se habrá establecido un camino crítico y unas holguras para cada una de las actividades. La prioridad en la asignación de los recursos será mayor cuanto menor sea la holgura disponible para cada una de las actividades.
Dada la dificultad de resolver estos problemas, se suelen utilizar métodos heurísticos que proporcionan soluciones suficientemente buenas con tiempos de cálculo razonables. El método de Burgess-Killebrew para la nivelación, o el método de Wiest-Levy para la asignación de recursos constituyen algunos ejemplos de heurísticas.
El algoritmo de Burgess-Killebrew es uno de los algoritmos pioneros en este campo; está considerado también como uno de los más eficientes. El diagrama de carga del recurso busca la actividad no crítica que tenga la fecha temprana de finalización más avanzada. Esta actividad retrasa su finalización unidad a unidad de tiempo hasta agotar su holgura. Se elige como fecha más temprana de finalización de la actividad la que haga mínima la suma de los cuadrados de las cargas. Se repite esta pauta con todas las tareas no críticas, teniendo prioridad aquella actividad que posea mayor holgura, en caso de que la fecha temprana de finalización más avanzada de dos tareas coincida. Una vez realizado con todas, se vuelve a iniciar un nuevo ciclo de iteraciones hasta que finalizada una iteración no resulte posible disminuir la suma de los cuadrados de las cargas.
El algoritmo de Wiest-Levy se sustenta en la programación de las actividades que puedan ejecutarse con los recursos disponibles. No obstante, esta programación puede ser revisada en posteriores iteraciones. Cuando la carga es superior a las disponibilidades, se recurre a retrasar alguna actividad, eligiendo entre las no críticas, la que resuelva el problema con el menor retraso. Si existen dos actividades que reúnen las mismas condiciones, se retrasa primero la de mayor holgura, con lo que las actividades críticas se retrasan cuando no hay otra opción.
Referencias:
PELLICER, E.; YEPES, V. (2007). Gestión de recursos, en Martínez, G.; Pellicer, E. (ed.): Organización y gestión de proyectos y obras. Ed. McGraw-Hill. Madrid, pp. 13-44. ISBN: 978-84-481-5641-1.
PELLICER, E.; YEPES, V.; TEIXEIRA, J.C.; MOURA, H.P.; CATALÁ, J. (2014). Construction Management. Wiley Blackwell, 316 pp. ISBN: 978-1-118-53957-6.
YEPES, V.; PELLICER, E. (2008). Resources Management, in Pellicer, E. et al.: Construction Management. Construction Managers’ Library Leonardo da Vinci: PL/06/B/F/PP/174014. Ed. Warsaw University of Technology, pp. 165-188. ISBN: 83-89780-48-8.
YEPES, V. (2023). Maquinaria y procedimientos de construcción. Problemas resueltos. Colección Académica. Editorial Universitat Politècnica de València, 562 pp. Ref. 376. ISBN 978-84-1396-174-3

Esta obra está bajo una licencia de Creative Commons Reconocimiento-NoComercial-SinObraDerivada 4.0 Internacional.