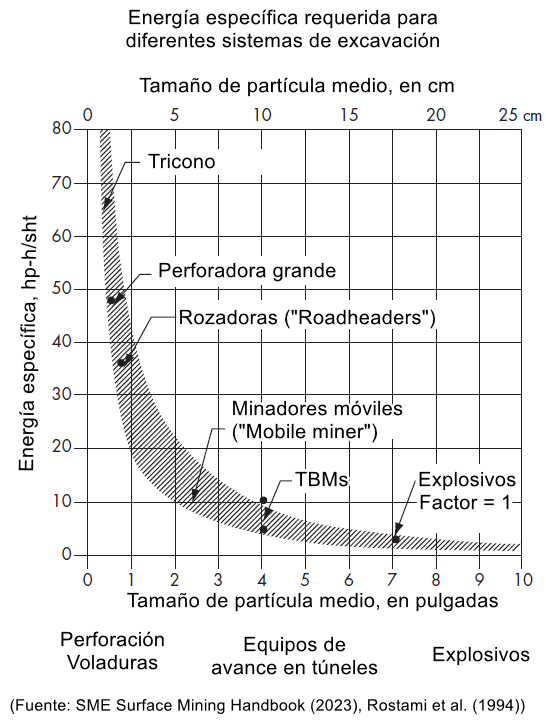
Figura 1. Energía específica requerida para diferentes sistemas de excavación.
La energía específica, también conocida como Specific Energy (SE) en inglés, se define como la cantidad de energía consumida para excavar un volumen unitario de roca. Esta medida se expresa en diversas unidades, tales como MJ/m, KW-h/m3, hp-h/yd3 o hp-h/t, que relacionan la energía consumida con el volumen excavado.
Es importante destacar que la energía específica tiende a aumentar cuando se busca producir partículas de un tamaño menor en una misma roca. Este incremento está directamente relacionado con el aumento de la resistencia a compresión de la roca en cuestión.
La energía específica requerida para la excavación de una determinada roca dependerá de dos factores clave: la separación de los cortadores (S) y su profundidad de ataque (P). El ratio entre estos dos parámetros, denominado S/P, se convierte en un elemento crucial al seleccionar equipos. Para rozadoras tipo “drag”, este ratio varía entre 2 y 4, mientras que para cortadores de discos oscila entre 10 y 20.
En términos prácticos, la energía específica desempeña un papel esencial al determinar los ratios de avance (m/h o m/día) de una máquina. Esta información se revela como un indicador clave para optimizar la eficiencia y el rendimiento de los equipos utilizados en la excavación de rocas.
La Figura 1 presenta el espectro de la energía específica necesaria para la fragmentación de una roca mediante diversos sistemas de excavación comúnmente utilizados.
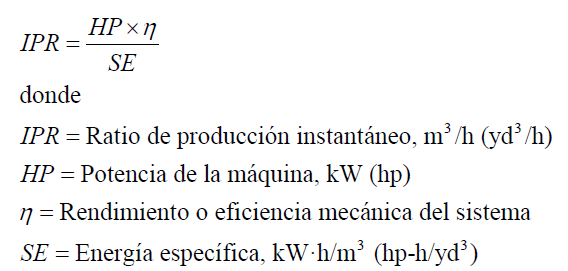
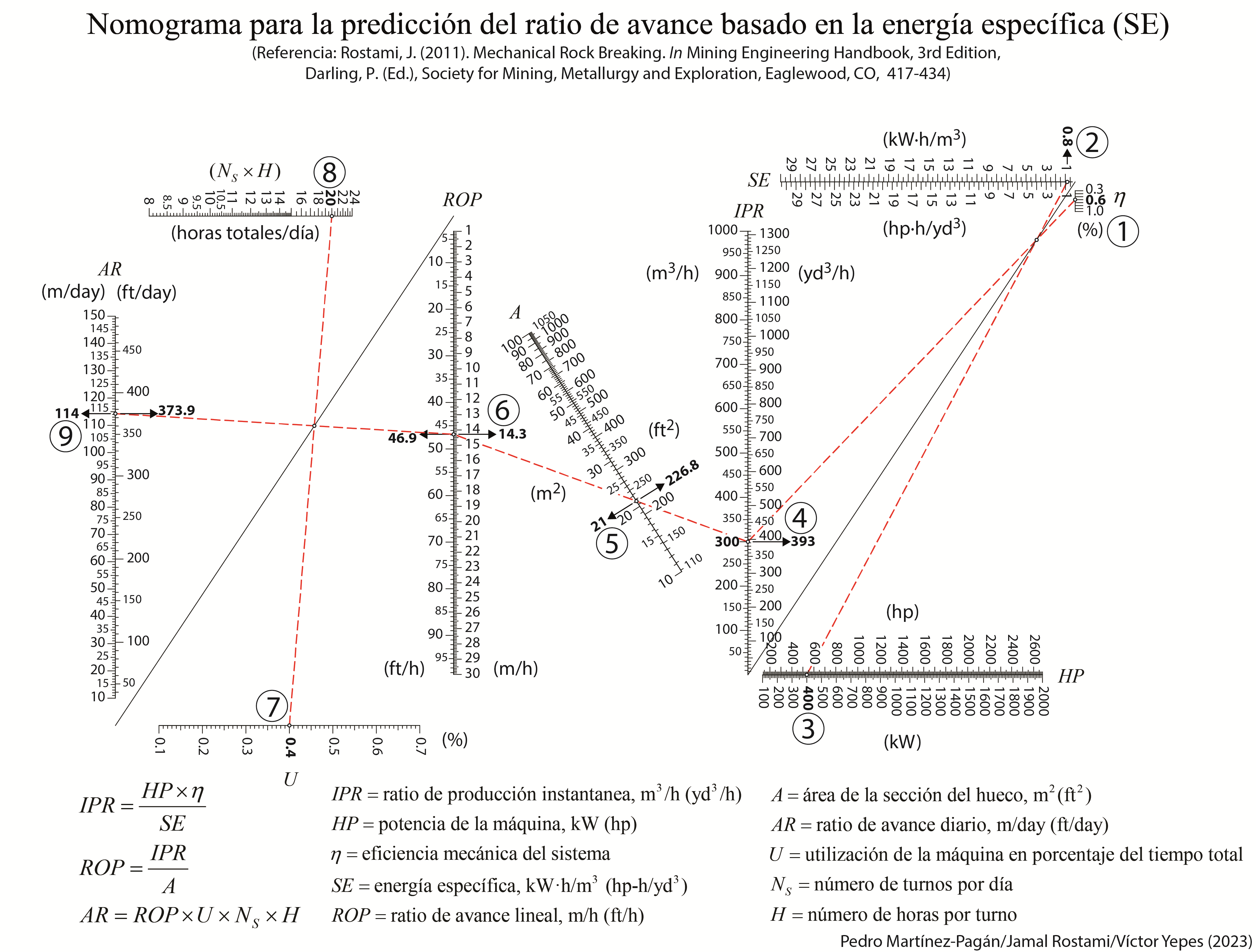
El ratio de producción instantáneo (IPR, en inglés) de un equipo se puede calcular de la siguiente forma:
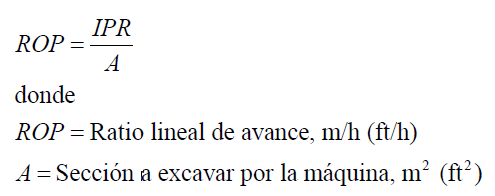
El ratio lineal de avance (ROP, en inglés) de un equipo se calcula de la siguiente forma:
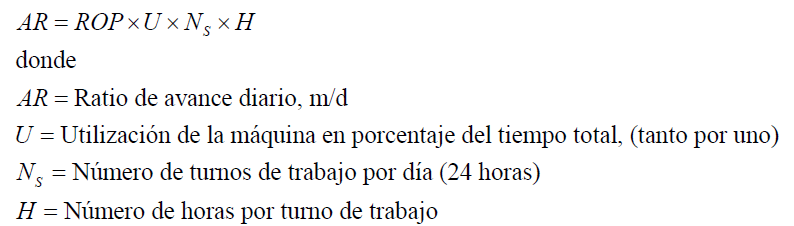
El ratio de avance diario (AR, en inglés) de un equipo es:
La tabla que se presenta a continuación resulta útil para anticipar el ratio de producción (IPR) y el ratio de avance (AR) de un equipo mecánico, todo ello fundamentado en la energía específica.
Referencias:
MARTÍNEZ-PAGÁN, P. (2023). Laboreo de minas. 3.º Curso – GIRME – Ingeniería de Minas. Universidad Politécnica de Cartagena.
ROSTAMI, J. (2011). Mechanical Rock Breaking. In SME Mining Engineering Handbook, 3rd Edition, Darling, P. (Ed.), Society for Mining, Metallurgy, and Exploration, 417-434.
YEPES, V. (2014). Maquinaria para sondeos y perforaciones. Apuntes de la Universitat Politècnica de València, Ref. 209.
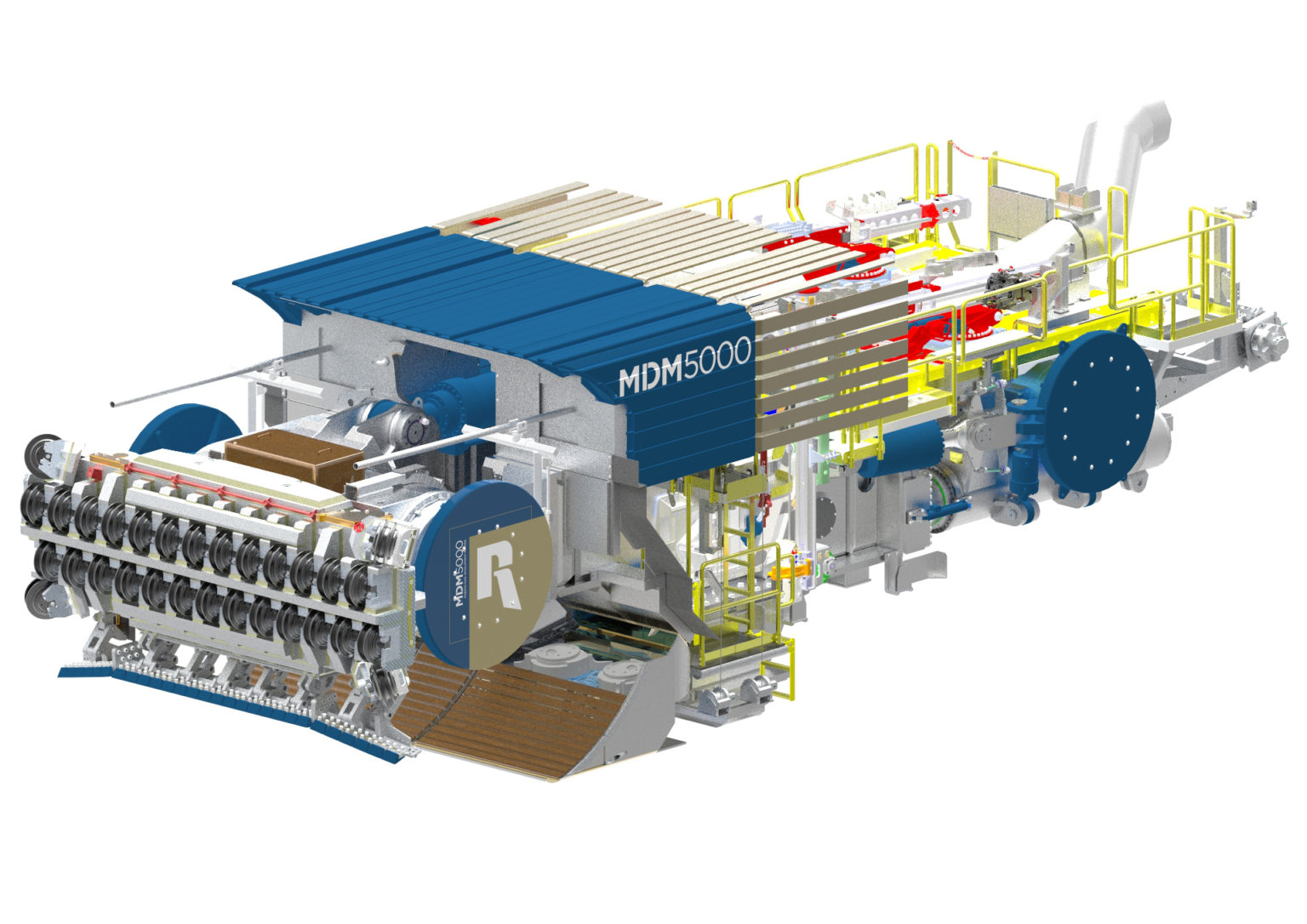
Figura 1. https://www.robbinstbm.com/products/mining-machines/mine-development-machine/
La Máquina de Desarrollo Minero “Mine Development Machine” (MDM) es un equipo especializado diseñado para la perforación de secciones no circulares, específicamente rectangulares, en entornos de rocas con una resistencia a la compresión de hasta 200 MPa. Este dispositivo está equipado con un cabezal de corte rotativo que cuenta con cortadores de disco para garantizar una eficiente excavación.
Hasta ahora, la excavación de galerías mineras y túneles de acceso se ha llevado a cabo mediante una metodología de perforación y voladura a menudo lenta y ardua. Históricamente, los métodos de túneles mecanizados han carecido de la personalización necesaria para agilizar las actividades mineras. El MDM ofrece una tasa de excavación el doble de rápida que la perforación y voladura, en el caso del modelo Robbins MDM5000. El perfil rectangular elimina la necesidad de verter una solera o cortar el invertido, lo que permite su uso inmediato por la flota de vehículos de la mina.
Su aplicación principal se encuentra en la construcción de infraestructuras mineras, especialmente en el desarrollo de túneles de acceso o galerías con dimensiones de 5,0 m de ancho por 4,5 m de alto. La solera resultante del túnel queda en condiciones óptimas para ser utilizada por los equipos mineros que operan sobre ruedas, facilitando así el transporte y movimiento en el interior de la mina.
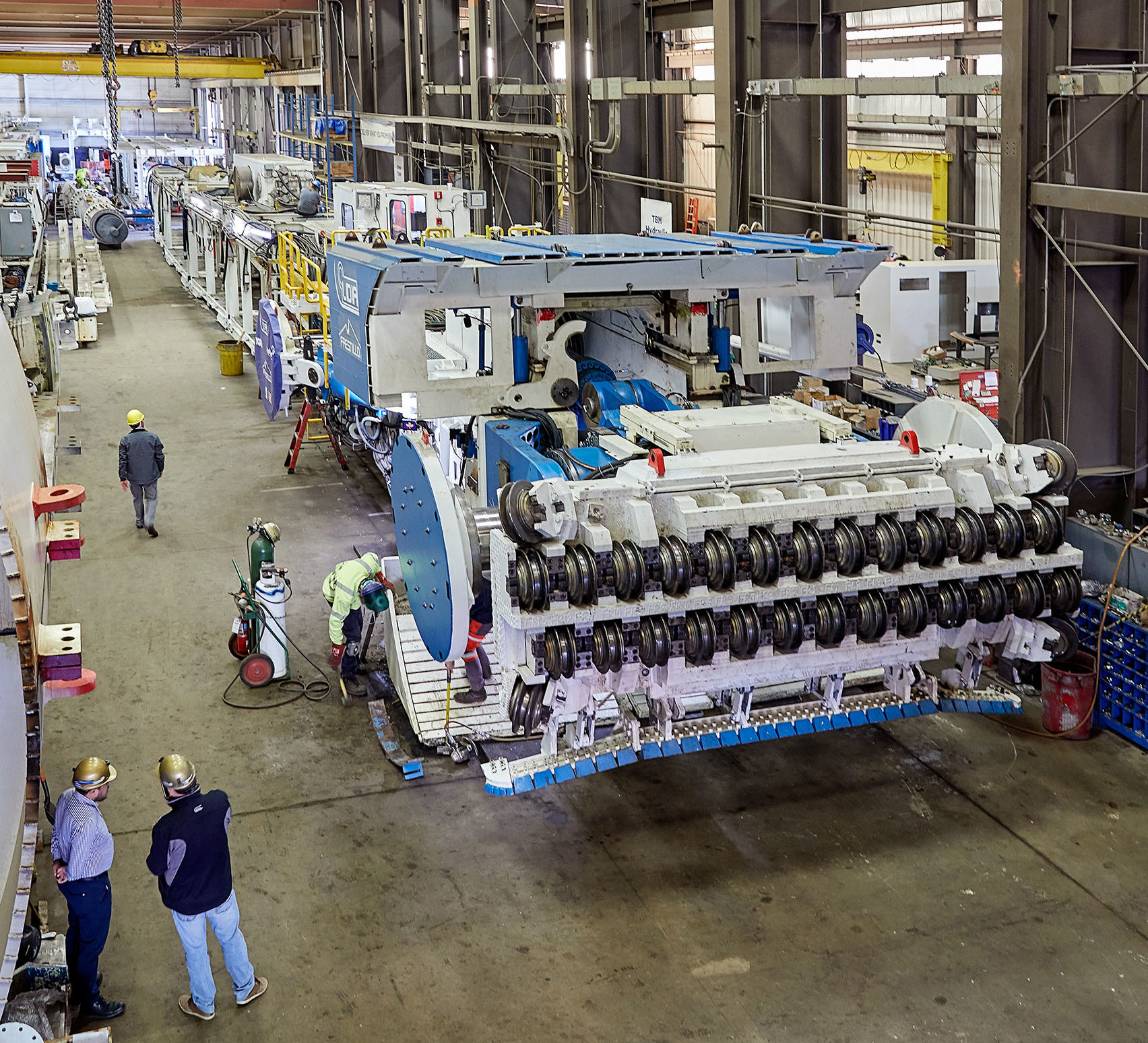
Figura 2. https://www.robbinstbm.com/products/mining-machines/mine-development-machine/
El MDM utiliza gran parte de la misma tecnología que una máquina perforadora de túneles, incluyendo cortadores de disco que se desplazan en la misma pista durante un ciclo de perforación. Durante la perforación, los agarres se extienden contra las paredes del túnel, reaccionando al impulso hacia adelante de la máquina, al igual que en las TBM estándar. Los cilindros hidráulicos de propulsión se extienden, empujando los cortadores hacia la roca. La transferencia de este alto impulso a través de los cortadores de disco giratorios crea fracturas en la roca, provocando que los fragmentos se desprendan de la cara del túnel. Un sistema único de agarre flotante presiona contra las paredes laterales y se bloquea en su lugar mientras los cilindros de propulsión se extienden, permitiendo que la viga principal avance el MDM. Además, se coloca soporte continuo inmediatamente detrás del cabezal cortador en un patrón que cumple con los estándares de la mina. El soporte y la instalación de servicios públicos como tuberías, ventilación e iluminación se realizan simultáneamente a la perforación. Dado que la roca se fractura mecánicamente, no se requiere trituración secundaria y la roca rota es adecuada para el transporte mediante cintas transportadoras.
Existen algunas diferencias clave: mientras que una TBM estándar tiene un movimiento circular constante coincidente con el eje del túnel durante la perforación, el MDM utiliza un movimiento oscilante del cabezal cortador. El cabezal cortador del MDM oscila hacia arriba/abajo alrededor de un eje horizontal perpendicular al eje del túnel. La evacuación de material en el MDM es bastante diferente a la de una TBM estándar, con el material desplazándose hacia atrás desde el cabezal cortador en cada barrido descendente hacia una cinta transportadora o cadena instalada en el invertido. Esencialmente, la carga de la cinta transportadora se ejecuta mediante el barrido descendente del cabezal cortador en lugar de que los cucharones de material se vacíen sobre una cinta transportadora mientras el cabezal cortador gira, como en la configuración de una TBM estándar.
El MDM presenta diversas ventajas para las minas en comparación con otros métodos, como la perforación y voladura. La perforación con el MDM tiene tasas de avance aproximadamente el doble de las de una perforación y voladura, lo que resulta en paredes de túneles más uniformes, menos desprendimiento excesivo y un menor requerimiento de soporte estructural. El aumento en las tasas de avance se debe en parte al progreso continuo de la máquina, a diferencia de las operaciones de perforación y voladura, donde los equipos deben salir del túnel durante la detonación por motivos de seguridad. Además, la instalación simultánea de soporte estructural aumenta aún más las tasas generales de avance en comparación con las operaciones de perforación y voladura que deben instalar el soporte estructural de manera secuencial.
Este avanzado equipo ha demostrado su eficacia en la mina de plata de Fresnillo, ubicada en México. Su rendimiento se destaca con avances notables de 10-12 metros por día en condiciones de rocas con una resistencia inferior a 100 MPa, y de 7-10 metros por día en terrenos más desafiantes, con resistencia en el rango de 100-150 MPa. La máquina ha perforado a velocidades de hasta 52 metros en una semana y 191 metros en un mes en andesita y esquisto con intrusiones de cuarzo que desafiaron intentos previos de excavación con rozadoras.
La versatilidad y eficiencia de la MDM la convierten en una herramienta crucial para la ejecución de proyectos mineros, mejorando la productividad y la seguridad en el desarrollo de túneles y galerías en condiciones diversas.
Os dejo algunos vídeos de esta máquina.
Os dejo, también, un artículo explicativo de esta máquina.
DIRECCIÓN GENERAL DE CARRETERAS (1998). Manual para el control y diseño de voladuras en obras de carreteras. Ministerio de Fomento, Madrid, 390 pp.
INSTITUTO TECNOLÓGICO GEOMINERO DE ESPAÑA (1994). Manual de perforación y voladura de rocas. Serie Tecnológica y Seguridad Minera, 2ª Edición, Madrid, 541 pp.
MARTÍ, J.V.; YEPES, V.; GONZÁLEZ, F.; ALCALÁ, J. (2012). Técnicas de voladuras y excavación en túneles. Editorial de la Universitat Politècnica de València. Ref. 530, 165 pp.
UNIÓN ESPAÑOLA DE EXPLOSIVOS (1990). Manual de perforación. Río Blast, S.A., Madrid, 206 pp.
YEPES, V. (2014). Maquinaria para sondeos y perforaciones. Apuntes de la Universitat Politècnica de València, Ref. 209.
Figura 1. Cat HW300 Highwall Miner, https://h-cpc.cat.com/cmms/v2?&f=subfamily&it=group&cid=406&lid=en&sc=CA&gid=18296377&nc=1
Dentro de los equipos empleados en la excavación mecánica en minería a cielo abierto destacan los “Highwall Miners”. Estos avanzados equipos mineros desempeñan un papel crucial en la extracción de minerales al excavar sobre paredes o muros verticales. Constituyen una combinación ingeniosa entre un minador continuo (CM) y la estructura exterior que proporciona el soporte necesario para el minador. Su aplicación se centra en la explotación de capas delgadas de carbón, yeso u otras rocas de dureza media a blanda, siendo especialmente idóneos para la minería de contorno.
Con la capacidad de extraer minerales de carbón con potencias de hasta 1,5 metros, estos equipos representan una solución eficiente y productiva para la industria minera. La versatilidad de estos dispositivos permite alcanzar grandes producciones, llegando hasta las 110,000 toneladas al mes, con tan solo cuatro personas operando el equipo.
Destacando entre sus características, el equipo Cat HW300 Highwall Miner demuestra su capacidad al trabajar en bermas de hasta 18 metros. Esta notable amplitud de acción amplía las posibilidades de extracción y facilita la labor minera en entornos desafiantes.
Figura 2. https://cinmine.com/products/highwall-miner-products/
Además de su eficiencia en la producción, estos equipos demuestran su valía al recuperar hasta un 70% del carbón presente en las capas explotadas, lo que contribuye significativamente a maximizar la rentabilidad de las operaciones mineras.
En resumen, estos equipos de vanguardia no solo destacan por su capacidad para extraer minerales en condiciones específicas, sino que también ofrecen eficiencia, productividad y rentabilidad, convirtiéndose en piezas clave para el éxito de la industria minera en la extracción de recursos en capas delgadas.
Os dejo a continuación algunos vídeos para que veáis el funcionamiento de estos equipos.
Referencias:
DIRECCIÓN GENERAL DE CARRETERAS (1998). Manual para el control y diseño de voladuras en obras de carreteras. Ministerio de Fomento, Madrid, 390 pp.
INSTITUTO TECNOLÓGICO GEOMINERO DE ESPAÑA (1994). Manual de perforación y voladura de rocas. Serie Tecnológica y Seguridad Minera, 2ª Edición, Madrid, 541 pp.
MARTÍ, J.V.; YEPES, V.; GONZÁLEZ, F.; ALCALÁ, J. (2012). Técnicas de voladuras y excavación en túneles. Editorial de la Universitat Politècnica de València. Ref. 530, 165 pp.
UNIÓN ESPAÑOLA DE EXPLOSIVOS (1990). Manual de perforación. Rio Blast, S.A., Madrid, 206 pp.
YEPES, V. (2014). Maquinaria para sondeos y perforaciones. Apuntes de la Universitat Politècnica de València, Ref. 209.
Figura 1. https://www.epiroc.com/es-es/products/rock-drilling-tools/geotechnical-drilling-tools/large-diameter-drilling-solustions/cluster-drills
El sistema Cluster-Drill constituye un avance en la técnica de perforación rotopercutiva diseñado especialmente para perforaciones de gran diámetro. Este sistema está conformado por un conjunto de martillos en fondo (DTH) que resulta ideal para la construcción de chimeneas.
Los diámetros de las perforaciones abarcan desde 915 mm hasta 1778 mm. Este sistema permite alcanzar grandes profundidades, llegando hasta los 300 m en roca dura y abrasiva.
Además de posibilitar la perforación de cada martillo TDH de manera independiente, también incorpora un módulo rotativo que los contiene. Este módulo principal puede extenderse para recoger los detritos generados durante el proceso.
Figura 2. https://www.epiroc.com/es-es/products/rock-drilling-tools/geotechnical-drilling-tools/large-diameter-drilling-solustions/cluster-drills
Os paso un vídeo de Atlas Copco de este sistema de perforación.
Referencias:
DIRECCIÓN GENERAL DE CARRETERAS (1998). Manual para el control y diseño de voladuras en obras de carreteras. Ministerio de Fomento, Madrid, 390 pp.
INSTITUTO TECNOLÓGICO GEOMINERO DE ESPAÑA (1994). Manual de perforación y voladura de rocas. Serie Tecnológica y Seguridad Minera, 2ª Edición, Madrid, 541 pp.
MARTÍ, J.V.; YEPES, V.; GONZÁLEZ, F.; ALCALÁ, J. (2012). Técnicas de voladuras y excavación en túneles. Editorial de la Universitat Politècnica de València. Ref. 530, 165 pp.
UNIÓN ESPAÑOLA DE EXPLOSIVOS (1990). Manual de perforación. Rio Blast, S.A., Madrid, 206 pp.
YEPES, V. (2014). Maquinaria para sondeos y perforaciones. Apuntes de la Universitat Politècnica de València, Ref. 209.
Os presento el libro que he publicado sobre maquinaria y procedimientos de construcción. Se trata de una completa colección de 300 problemas resueltos, abarcando aspectos relacionados con la maquinaria, medios auxiliares y procedimientos de construcción. Su contenido se enfoca en la mecanización de las obras, costos, disponibilidad, fiabilidad y mantenimiento de equipos, estudio del trabajo, producción de maquinaria, sondeos y perforaciones, técnicas de mejora del terreno, control y abatimiento del nivel freático, movimiento de tierras, equipos de dragado, explosivos y voladuras, excavación de túneles, instalaciones de tratamiento de áridos, compactación de suelos, ejecución de firmes, maquinaria auxiliar como bombas, compresores o ventiladores, cables y equipos de elevación, cimentaciones y vaciados, encofrados y cimbras, fabricación y puesta en obra del hormigón, organización y planificación de obras.
Es un libro, por tanto, muy enfocado a los ámbitos de la ingeniería de la construcción, tanto en el ámbito de la edificación, de la minería o de la ingeniería civil. Además, se incluyen 27 nomogramas originales y 19 apéndices para apoyar tanto a estudiantes de ingeniería o arquitectura, como a profesionales que enfrentan desafíos similares en su práctica diaria en obra o proyecto. La colección se complementa con un listado de referencias bibliográficas que respaldan los aspectos teóricos y prácticos abordados en los problemas. Estos problemas son similares a los tratados durante las clases de resolución de casos prácticos en la asignatura de Procedimientos de Construcción del Grado en Ingeniería Civil de la Universitat Politècnica de València (España). Por tanto, el libro resulta adecuado tanto para estudiantes de grado como para cursos de máster relacionados con la ingeniería civil y la edificación.
Sobre el autor:Víctor Yepes Piqueras. Doctor Ingeniero de Caminos, Canales y Puertos. Catedrático de Universidad del Departamento de Ingeniería de la Construcción y Proyectos de Ingeniería Civil de la Universitat Politècnica de València. Número 1 de su promoción, ha desarrollado su vida profesional en empresas constructoras, en el sector público y en el ámbito universitario. Ha sido director académico del Máster Universitario en Ingeniería del Hormigón (acreditado con el sello EUR-ACE®), investigador del Instituto de Ciencia y Tecnología del Hormigón (ICITECH) y profesor visitante en la Pontificia Universidad Católica de Chile. Imparte docencia en asignaturas de grado y posgrado relacionadas con procedimientos de construcción y gestión de obras, calidad e innovación, modelos predictivos y optimización en la ingeniería. Sus líneas de investigación actuales se centran en la optimización multiobjetivo, la sostenibilidad y el análisis de ciclo de vida de puentes y estructuras de hormigón.
Figura 1. Minador continuo excavando. https://www.exms.co.za/expert-camera-systems/continuous-miner-camera-system/
Los minadores continuos (continuous miners, en inglés), son equipos para la excavación mecánica usados en minería subterránea. Crean huecos rectangulares empleando tambores de picas (6 m de ancho por 5 m de alto). Se emplean principalmente en minas de minerales blandos, tales como el carbón o la sal.
Existen equipos con posibilidad de llevar a cabo un sostenimiento simultáneo, lo que le permite avanzar 12 m sin retirarse. Un equipo puede producir unas 600 – 700 t/h de mineral. Este mineral se descarga a través de un transportador blindado a “shuttle cars”.
A continuación presento un ejercicio resuelto y un nomograma que puede ser útil para el cálculo del ratio de avance diario de un minador continuo. Se trata de una colaboración con el profesor de la Universidad Politécnica de Cartagena, Pedro Martínez Pagán.
Como podéis comprobar, existen vínculos comunes entre las especialidades de ingeniería civil y minas en muchos aspectos relacionados con la maquinaria y los procedimientos de construcción. Espero que os sea útil.
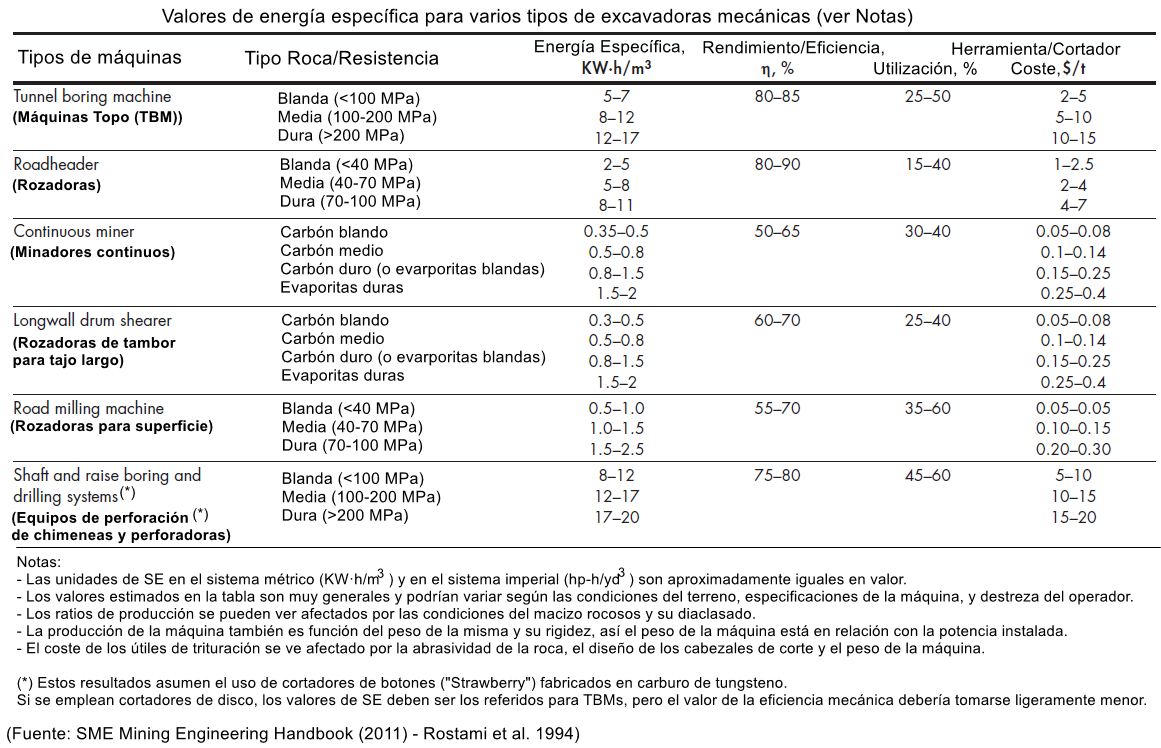
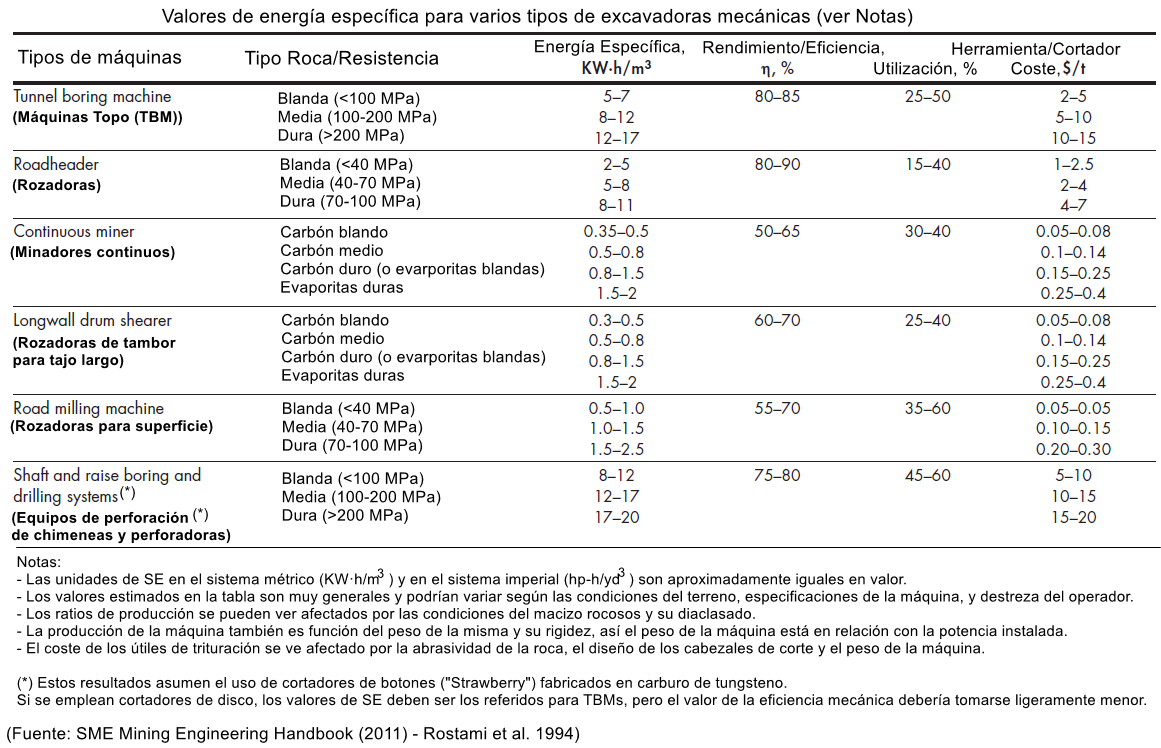
Para resolver este ejercicio, resulta de interés la tabla que presentamos en la Figura 2, donde se proporcionan valores de energía específica para varios tipos de excavadoras mecánicas.
Figura 2. Valores de energía específica para varios tipos de excavadoras mecánicas. Fuente: SME Mining Engineering Handbook (2011) – Rostami et al. (1994).
También podéis utilizar este nomograma, elaborado junto con los profesores Pedro Martínez Pagán y Jamal Rotami, que espero os sea útil.
ROSTAMI, J. (2011). Mechanical Rock Breaking. In SME Mining Engineering Handbook, 3rd Edition, Darling, P. (Ed.), Society for Mining, Metallurgy, and Exploration, 417-434.
Perforación a percusión con cable. https://www.massenzaperforadoras.es/la-perforacion-de-percusion/
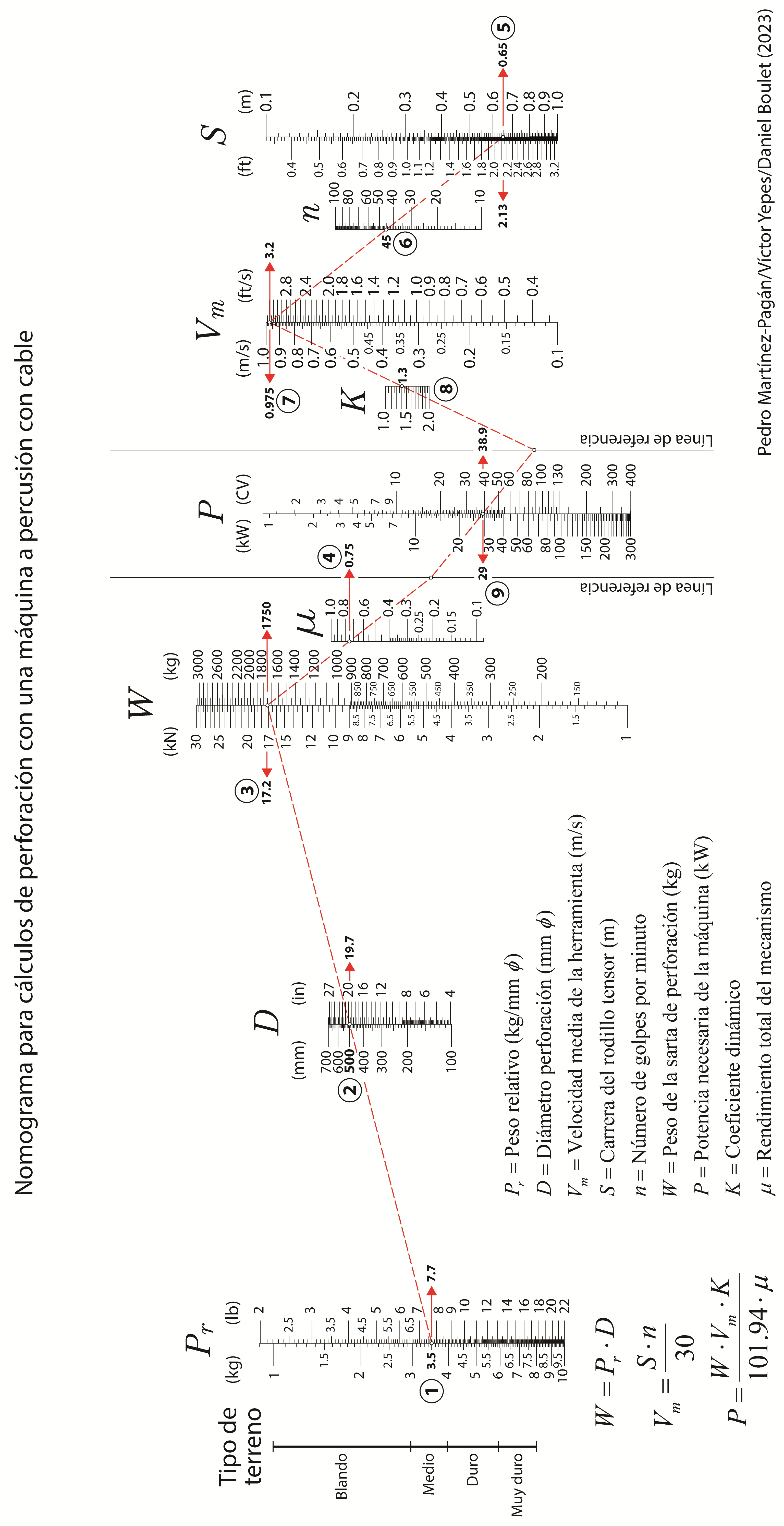
La perforación a percusión con cable es un método de perforación vertical que se basa en el golpeteo de un trépano pesado que se eleva con un cable y cae por gravedad, fragmentando el suelo. Este método se utiliza en terrenos de dureza media a baja o en terrenos duros que sean frágiles, pero se desaconseja en terrenos detríticos no cohesionados, muy duros, abrasivos y plásticos. La frecuencia de golpeo se encuentra en el rango de 40 a 50 impactos por minuto, y se logran rendimientos medios de 2 a 4 m/día en materiales duros y de 10 a 20 m/día en materiales blandos. La altura de caída del trépano depende de la dureza del terreno y de la profundidad del fondo de perforación.
Aquí os traigo un nomograma original, elaborado en colaboración con los profesores Pedro Martínez-Pagán y Daniel Boulet, en el que se puede calcular las características propias de este método de perforación, tales como el peso de la sarta de perforación, la velocidad media de la herramienta o la potencia necesaria de la máquina. También os paso un problema resuelto, que espero sea de vuestro interés.
Figura 1. https://www.monografias.com/trabajos68/tubos-exploracion-taladros-explotacion-subterranea/tubos-exploracion-taladros-explotacion-subterranea2
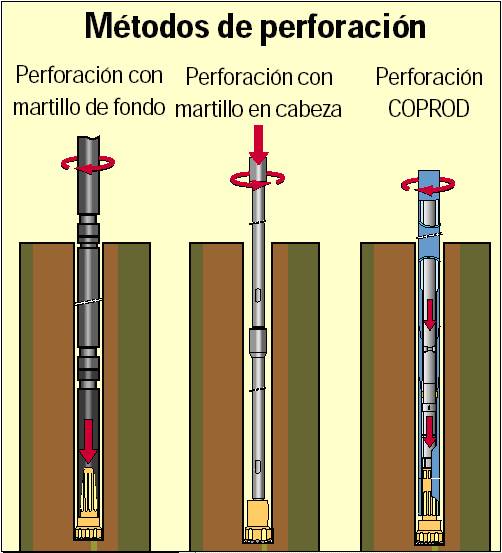
La perforación rotopercutiva con martillos hidráulicos es el método predominante en las voladuras a cielo abierto. Dentro de esta técnica se identifican tres grupos principales. De los dos primeros ya hemos hablado en sendos artículos dentro de este blog.
El primer grupo son los martillos en cabeza, donde la rotación y percusión ocurren fuera del barreno y se transmiten mediante la espiga y la sarta hasta la boca de perforación. Los martillos pueden ser neumáticos o hidráulicos, siendo estos últimos los más comunes. El rango de perforación es hasta 89 mm de diámetro y profundidades máximas de 15-20 m debido a las pérdidas de energía que se producen en la transmisión de la percusión a través del varillaje, siendo la desviación que es mayor en comparación con otros grupos. Las ventajas incluyen menor coste de equipo y energía, accesorios de perforación más económicos que en el caso de los martillos de fondo, mayor velocidad de perforación y facilidad de automatización de los equipos. Sin embargo, sus desventajas son mayor desviación y mantenimiento más complejo.
El segundo grupo es el martillo en fondo, donde la percusión se realiza directamente sobre la boca de perforación y la rotación se efectúa en el exterior del barreno. El pistón se acciona mediante aire comprimido o agua, mientras que la rotación puede ser neumática o hidráulica. El rango de perforación va desde 89 mm a 250 mm de diámetro y profundidad máxima de 60 m. Las ventajas incluyen velocidad de perforación constante con la profundidad, menor desgaste en la boca y mayor vida útil del varillaje. Las desventajas son menor velocidad de perforación y mayores costos de fungibles, como los tubos y las bocas. Además, se puede perder el martillo si se sufre atrancamiento el fondo del barreno.
El tercer grupo es el Sistema COPROD, que combina la tecnología de martillo en cabeza y en fondo para la perforación. Se utilizan perforadoras similares a las de martillo en cabeza, pero se lleva a cabo la percusión y la rotación del martillo por separado, lo que aúna la velocidad de perforación del martillo en cabeza con la menor desviación del martillo en fondo. El varillaje transmite la percusión y el aire de barrido necesarios hasta la boca del pozo. La rotación también se realiza desde la superficie mediante una tubería exterior unida al varillaje mediante guías, lo que proporciona mayor rigidez y peso y reduce el espacio entre las paredes del barreno y el varillaje. Entre las ventajas se incluyen el aumento del diámetro de perforación, menor riesgo de atranques, menor consumo de energía, mayor vida útil de los accesorios de perforación y menor desviación en comparación con otros métodos. Sin embargo, es importante tener en cuenta que el COPROD puede ser más costoso que otros métodos.
Os dejo algunos vídeos explicativos sobre la perforación COPROD que espero os sean de interés.
Referencias:
DIRECCIÓN GENERAL DE CARRETERAS (1998). Manual para el control y diseño de voladuras en obras de carreteras. Ministerio de Fomento, Madrid, 390 pp.
INSTITUTO TECNOLÓGICO GEOMINERO DE ESPAÑA (1994). Manual de perforación y voladura de rocas. Serie Tecnológica y Seguridad Minera, 2ª Edición, Madrid, 541 pp.
MARTÍ, J.V.; YEPES, V.; GONZÁLEZ, F.; ALCALÁ, J. (2012). Técnicas de voladuras y excavación en túneles. Editorial de la Universitat Politècnica de València. Ref. 530, 165 pp.
UNIÓN ESPAÑOLA DE EXPLOSIVOS (1990). Manual de perforación. Rio Blast, S.A., Madrid, 206 pp.
YEPES, V. (2022). Maquinaria para sondeos, movimientos de tierras y construcción de firmes. Apuntes de la Universitat Politècnica de València, Ref. 22.
Perforadora con martillo en cabeza. https://psvperforacion.com/productos-bburg/
La perforación con martillo en cabeza es un sistema clásico que ha utilizado el accionamiento neumático. De este tipo de perforadora ya hemos hablado en un artículo anterior. Sin embargo, hoy en día está siendo desplazado por los martillos en fondo y equipos rotativos. De hecho, desde la aparición de los martillos hidráulicos en la década de los 70, este sistema ha visto resurgir su utilidad y campo de aplicación.
¿Cuál es la razón por este cambio de tendencia? La justificación es muy sencilla. Basta emplear las ecuaciones básicas de la energía y la potencia desarrollada por el pistón de este tipo de perforadoras. En efecto, la energía cinética que alcanza el pistón es proporcional a la presión de aire, a la superficie del pistón y a la longitud de carrera. Para calcular la potencia bastará calcular el número de impactos (energía cedida) en la unidad de tiempo (impactos por minuto).
Por tanto, ante dos perforadoras de la misma potencia, una produciendo pocos impactos por minuto (n), pero de gran energía, y otra con un elevado número de impactos por minuto (N), pero de pequeña energía, tendremos que la primera perforadora romperá más roca a cada golpe, pero la barrena sufrirá mucho, llegando en algunos casos a clavarse en la roca. La segunda cortará menos roca por impacto, de modo que no fatigará el varillaje ni clavará la barrena, siempre que su impacto supere la energía necesaria para romper esa menor cantidad de roca.
Por tanto, las perforadoras con un gran pistón, gran carrera y presiones bajas son una tendencia antigua que se sustituye por perforadoras hidráulicas, con altas presiones, pistones y carrera pequeños y gran número de impactos por minuto.
Os dejo a continuación la demostración de esta formulación que, espero, os sea de utilidad.
DIRECCIÓN GENERAL DE CARRETERAS (1998). Manual para el control y diseño de voladuras en obras de carreteras. Ministerio de Fomento, Madrid, 390 pp.
INSTITUTO TECNOLÓGICO GEOMINERO DE ESPAÑA (1994). Manual de perforación y voladura de rocas. Serie Tecnológica y Seguridad Minera, 2ª Edición, Madrid, 541 pp.
MARTÍ, J.V.; YEPES, V.; GONZÁLEZ, F.; ALCALÁ, J. (2012). Técnicas de voladuras y excavación en túneles. Editorial de la Universitat Politècnica de València. Ref. 530, 165 pp.
UNIÓN ESPAÑOLA DE EXPLOSIVOS (1990). Manual de perforación. Rio Blast, S.A., Madrid, 206 pp.
YEPES, V. (2022). Maquinaria para sondeos, movimientos de tierras y construcción de firmes. Apuntes de la Universitat Politècnica de València, Ref. 22.
Tricono con insertos. https://www.talleresegovia.com
En un artículo anterior se describió la perforación rotativa de rocas y la perforación con triconos. El principio utilizado por las perforadoras rotativas consiste en aplicar energía a la roca haciendo rotar un útil de corte o destroza conjuntamente con la acción de una gran fuerza de empuje. Actualmente, se emplean con frecuencia los trépanos triturantes o triconos, para lograr un alto rendimiento, alcanzando entre 60-100 m/turno, en profundidades de hasta los 200 m. Se usa en ingeniería civil con diámetros entre 100 y 300 mm. Sin embargo, en la industria petrolera, se han superado estos límites, alcanzando hasta 4500 metros de profundidad en España.
En este artículo vamos a presentar un problema resuelto de rendimientos y plazos en una perforación rotativa con triconos sobre una roca. Como podréis ver, muchas de las formulaciones empleadas son empíricas y, en este sector, sigue empleándose frecuentemente el sistema de unidades anglosajón.
INSTITUTO TECNOLÓGICO Y GEOMINERO DE ESPAÑA (1994). Manual de perforación y voladura de rocas. Serie: Tecnología y Seguridad Minera. Segunda edición, Madrid, 541 pp.
LÓPEZ JIMENO, C. (Ed.) (2000). Manual de sondeos. E.T.S. de Ingenieros de Minas de Madrid, 699 pp.
MARTÍ, J.V.; GONZÁLEZ, F.; YEPES, V. (2005). Temas de procedimientos de construcción. Extracción y tratamiento de áridos. Editorial de la Universidad Politécnica de Valencia. Ref. 2005.165. Valencia, 74 pp.